

Ijraset Journal For Research in Applied Science and Engineering Technology
5-in-1 Automatic Agriculture Machine
Authors: Rohit Killampalli, Thirunahari Nagaraju, Valluru Rajendra Naidu, L. V. R Chaitanya Prasad
DOI Link: https://doi.org/10.22214/ijraset.2022.44068
Certificate: View Certificate
Abstract
Goal of this project is to complete five important tasks in the world of agriculture, including 1 – seed planting automation, 2 – weed plucking mechanism building, 3 – plough mechanism control, 4 – providing water where seed is sown, and 5 – soil leveling. All of these mechanisms are connected to a single moving mechanism, and the tasks listed above will be carried out in order. The entire apparatus is meant to be automated and controlled by a remote. The moving mechanism is controlled by a remote control unit that uses RF modules to move in all directions. Initially, this device must be positioned from the row\'s beginning point, where seeds will be sown one after the other with a predetermined spread. After placing the mechanism, the start button must be pressed, causing the mechanism to travel a short distance ahead before stopping to drop the seeds. After completing this task, the mechanism will be moved farther to supply the water. The mechanism will be halted for a short time while supplying water again, however the mechanism will continue to drop seeds and give water until the stop button is pressed.
Introduction
I. INTRODUCTION
The machine built here is particularly beneficial for vast cultivated areas; as a prototype module, it is meant to plant seeds one after another in a single row, but when changed to an engineering module, it can plant numerous seeds in different locations at the same time. Similarly, various processes may be carried out in parallel, allowing many acres to be seeded in less time.
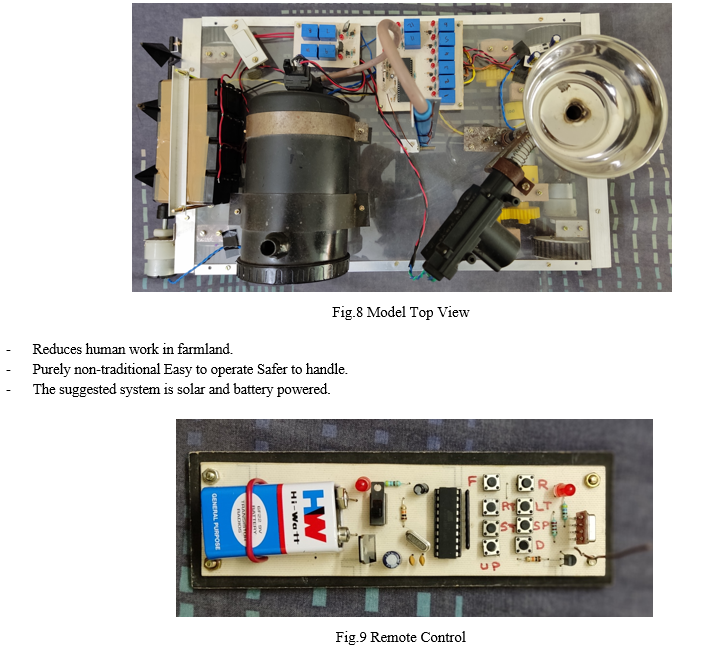
Six DC motors power the whole mechanical transmission portion. These motors, in combination with the mainframe at various points throughout the system, can execute many functions at the same time. The entire machine, including the seeds container and other mechanics, is designed to move freely in all directions with the use of a remote control. The machine travels forward and backward with the aid of 8 control keys connected to a microcontroller in the remote control unit; moreover, despite the lack of a steering system, the machine may turn left or right with the same remote. After positioning the machine to plant seeds in one row and pressing the start button on the remote control unit, the machine begins ploughing, planting seeds, removing weeds, leveling the soil, and pouring water. All of these actions will be completed in a certain order.
The project's main goal is to create a hardware prototype and software that can be used to replicate an automated sowing machine, which is very valuable for farmers. The entire machine is controlled by an 89C51 microcontroller, which conducts functions in response to command signals received from the remote control unit, also known as the main processing unit. The software is written in machine language, and the motors used in the project work control the complete mechanical transmission section based on the information supplied by the control keys and the control algorithm.
Today, no electronic or electrical equipment operates without Microcontrollers, including robots, machines, household appliances, telecommunication equipment, wireless systems, vehicles, naval equipment, air force equipment, and so on. As a result, these controllers have grown in popularity and are now widely employed in a variety of applications. These controllers are utilized for a variety of activities in this project.
II. PROPOSED SYSTEM
The microcontroller chip controls the machine through motors based on the assembly language programme produced for the processing unit. The seed planting mechanism's solenoid coil regulates seed delivery; this mechanism delivers seeds through a funnel, which is controlled by the solenoid coil. Another crucial function is to sprinkle water over the planted seed at a precise spot; for this, a small water pumping engine attached to the body of the micro water tanker is automatically engaged when needed and delivers the water over the leveled soil where the seed is planted. This water tank, which is mounted on the moving chassis, holds around 1.5 liters of water for demonstration purposes.
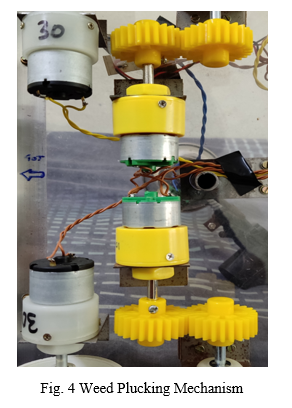
The moving mechanism is made up of high torque DC motors with shafts directly linked to the wheels; 30RPM motors are employed for this. The mechanism is capable of moving in any direction, even backwards. The plucking mechanism, which has four spur gears, is powered by two DC motors; each mechanism has two spur gears that mesh with one another; similarly, two identical mechanisms are built and mounted to the moving mechanism's chassis on the left and right sides, respectively. To see through the process, the chassis is made of a 5mm thick acrylic sheet that allows you to see what's going on underneath the chassis. The primary moving mechanism is designed to be driven by high torque DC motors and is regulated separately, allowing it to move in any direction.
The major objective of this vehicle is to assist the farmers in their agricultural fields with a variety of tasks, including weed removal. RF modules and radio control devices that operate at a high frequency are often employed. A remote control vehicle, often known as an RCV, differs from a robot in that it is constantly commanded by a person and does not perform positive action on its own. This project is primarily concerned with using RF technology to drive a robot or land rover. Radio-controlled vehicles and robots are handy in a variety of situations.
The microcontroller is at the heart of the project's operation; because this chip has a large number of I/O lines, it interfaces with all of the electronic and electrical devices. On a single integrated circuit package, a microcontroller contains a CPU, clock circuitry, ROM, RAM, and I/O hardware. The key benefit of adopting this little chip is that it takes up very little space on the PCB and eliminates the need for extra bulkier components.
The chip's job is to produce command codes through control keys; this chip is configured to generate 8 distinct command codes in 8-bit data, which is broadcast via an RF module that generates a high frequency of 433MHz, which is utilized as the carrier signal. The digital data received by the RF receiver is decoded by another comparable chip, which is then programmed to execute various functions based on the data entered to the controller chip. The functional description chapter has a full description.
The entire mechanical transmission portion is constructed using six 12V DC motors, each with its own reduction gear system for reducing motor speed and increasing torque. In addition, another DC motor is used to distribute water and is linked to the water tank, hence the name "water pumping motor." The RF transmitter utilized here is designed to transmit digital data, and because the encoder employed here creates digital data in the form of bits, this data will be transferred. The message signal might be analogue or digital in nature. Analog signals have amplitudes and times that vary continuously across their corresponding intervals. Analog signals include speech signals, television signals, and signals that describe air temperature at a specific place. In contrast, in a digital signal, both amplitude and time have discrete values. Digital signals include computer data or digital data generated by an embedded device. Digital signals include computer data or digital data generated by an embedded device. The carrier generator in the transmitting module is designed to create 433MHz of digital information, which is superimposed over this carrier and sent as a modulated wave. The received data will be de-modulated in the receiving module
III. METHDOLOGY
The complete machine is powered by a 12V DC battery, which can be replenished anytime the battery is depleted. In the agricultural industry, the equipment is used for a variety of tasks.
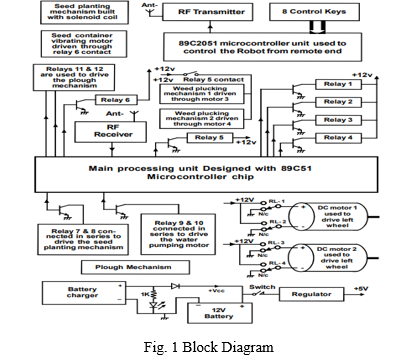
A. Function of Main Processing Unit
The major role of the controller is to regulate DC motors, control the solenoid coil, and control the water pumping motor in the receiver, which is designed to drive the vehicle according to the data collected from the RF receiver. The procedure starts with the transmitting section (remote), which is controlled by binary or digital data created by the micro controller 89C2051 and given to the RF transmitter for modulation. These signals are then transferred in the form of electromagnetic waves in all directions. The RF receiver demodulates the signal in the receiver portion, and the demodulated data is sent to the 89C51 controller.
B. Vehicle Driving Mechanism
The machine as a whole is meant to run on 12V DC, hence a 12V DC lead acid battery is employed and installed over the vehicle's chassis. The vehicle is powered by a heavy-duty battery, which must be charged using a single-phase battery charger after it has been discharged. The backup period is determined by the power usage of the complete machine and is powered by a 7.5 AH heavy duty battery.
The chassis is made up of square metal pipes that are meticulously cut to the proper diameters and welded together to form a rectangle frame. All electrical and mechanical components are housed within this metal frame, and two identical types of metal plates are welded to the chassis' bottom side to hold dc motors in place. Hard plastic molded wheels are attached to the motor shafts on the back side once the motors are fixed to the chassis. Seed planting, soil leveling, ploughing, water pouring, and other machinery are all coupled to the chassis in a row. Interconnections between electrical components and the main processing unit are established with copper conductors once all elements have been correctly assembled. All motors, including the solenoid coil, are controlled by relays, which total 12 in number.

C. Weed Plucking Mechanism
The weed plucking mechanism is separated into two portions, each of which has two spur gears. Both mechanisms are intended to be driven by two DC motors and are located on the left and right sides of the front side of the moving mechanism. Each mechanism is made up of two spur gears that are identical in size and have the same number of teeth. The motor shaft is directly linked with one spur gear, and the motor is powered by 12V DC. This motor has a 30 RPM rating, which means the gears will rotate at a typical pace. The other spur gear is connected to a motorized spur gear, allowing both gears to revolve clockwise. The aim of picking this mechanism is to pluck any grass or weeds that come into contact with it means that when the vehicle travels across the field, any little weeds that may have grown along the road and are under the mechanism will be eradicated.
D. Seed Planting Mechanism
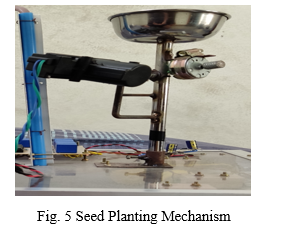
The seed planting machinery, which is made up of a solenoid coil and a vibrating motor, is programmed to plant seeds at precise spots at specific distances. After the plough mechanism, this mechanism is mounted above the moving metal framework. Initially, the movement of the mechanism must be calculated, which means that how far the mechanism travelled must be written down based on the time permitted to move it. For example, if both motors are propelled forward for 2 seconds, how far the device travelled must be noted down.
Assume that if the mechanism travels 20 centimeters, the seeds will be planted consistently at 20cm intervals. This means that the moving mechanism will halt every 20cm and a seed will be planted automatically. In this case, a solenoid coil is employed to restrict the seeds that are supplied through the funnel of the seed container. When the solenoid is triggered, it generates magnetic flux, which causes the metallic rod in the middle of the inductive coil to be pushed within the coil, causing the funnel tube vent to open briefly, allowing a few seeds to be delivered via the funnel.
The vibrating DC motor and seed planting mechanism will stay powered until the stop button on the remote control device is pressed. This motor, when paired with an unbalanced load, can cause the mechanism to shake. The purpose behind employing this vibrating mechanism is to allow the seeds to fall freely from a metal tube connected to a funnel. If this vibrator is missing, the seeds may become stuck inside the pipe. A vibrator is required to release the seeds from the funnel pipe. The seed planting pipe is separated into two portions, which means it is formed of two different components that are organised in a see-through fashion.
This shows that there is no variation in the pipes; the space between the two pipes is approximately three millimeters. To create an obstruction between two pipes, a solenoid coil is employed; this barrier is expected to be eliminated throughout the seed planting process. The goal of establishing this barrier is to block the passage of seeds through the pipe. A small metallic plate is utilised as an impediment and is placed between the two pipes.
This plate is welded with solenoid coil rod, which is a power full coil intended to work at 12V DC. During planting, the controller activates the solenoid coil, and the magnetic flux created by the coil pulls the metal plate towards the coil, clearing the pipe and passing seeds through it. The coil is briefly activated here, and the mechanism permits only a few seeds to pass through the pipe.
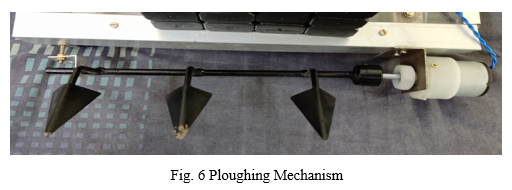
E. Ploughing Mechanism
The plough mechanism, which is linked to the main structure of the moving mechanism at the front section, may be raised and lowered, and it must be lowered when planting the seeds. The same remote controls the plough mechanism as well. The plough mechanism has three tools, and the middle tool will be used to sow the seeds in that row. Because this is a prototype module, the main concept will be tested in practice. As a result, minor mistakes may occur, such as the water not arriving exactly where the seed is planted.
The plough mechanism, which is linked to the main structure of the moving mechanism, is operated by a DC motor and may be raised and lowered using the remote control unit.
F. Watering & Soil Levelling
Water will be distributed for a brief period of time and automatically thanks to a little water pumping engine linked to the water tank. The soil leveling mechanism is located on the back side of the moving mechanism, and it employs basic soil level plates.
IV. RESULT
A prototype of 5 in 1 Automatic Agriculture Machine has been successfully built and its operation has been shown, which will be valuable to farmers.
Conclusion
Farmers may use this machine to perform a variety of tasks while also controlling the machine. By performing many tasks at the same time, farmers can save time and effort while increasing their revenue, which benefits the country\'s economy. Other sensors, such as cameras and infrared sensors may be added to this machine to make it a fully autonomous and intelligent robot that can make its own judgments based on localized environmental circumstances and create its own map to move about in the field. We may utilize micro tiny RF connection technology instead of traditional RF modules because it combines good electrical performance with the lowest mechanical dimensions, making system assembly easier and reducing board size by 75%. In the not-too-distant future, this machine may be enhanced with new functions and the ability to make necessary judgments even when the farmers are not there. Human interconnectivity and learning from experiences can also be used to induce it.
References
[1] Ajo Eldho Baby, Aphsana Salim, Rose Mary Benny, Riya Kuruvilla, Dr. Jinsa Kuruvilla: Automatic farming robot for smart and effective cultivation: International Research Journal of Engineering and Technology (IRJET) volume 06 Issue-June 2019. [2] Amrita Sneha. A, Abirami.E, Ankita. A, Mrs. R. Praveen, Mrs. R. Srimeena: Agricultural Robot for Automatic Ploughing and Seeding: IEEE International Conference on Technological Innovations in ICT 2015. [3] A.O. Hannure: Automation in Seed Planting : International Journal of Advance Research in Science and Engineering (IJARSE) Vol 5, 2018. [4] Gowtham Kumar SN, Anand G Warrier, Chirag B Shetty, Gerard Elston Shawn D’souza: Multipurpose Agricultural Robot: International Research Journal of Engineering and Technology (IRJET) Volume 06 Issue- Apr 2019. [5] Nagesh B. Adalinge et al: Development of Seed Sowing Machine: International Journal of Engineering and Technology innovation(IJETI) December 2019. [6] P.Usha, V. Maheswari, Dr. V. Nandagopal: “Design and Implementation of Seeding Agricultural Robot”: JIRAS Oct 2015. [7] Sachin Bharath jagpath, Saurav Mohan Bhosle, Vishal Atul Deshmukh, Gavin Madhukar Deshpande: Multipurpose agricultural robot: a multidisciplinary peer reviewed journal: March 2018. [8] Shiva prasad B: Innovative Agricultural Robot: International Journal of Advanced Research in Computer and Communication Engineering (IJARCCE) Oct,2017. [9] Swapnil Arun Baviskar, Prashant Mallaiah Kawre, Abhor Ashokrao Hormone, Nitin Dhanaji Aladar, Mrs. Rupali S. Shinde: Multipurpose Agriculture Robot Using Solar Energy: International Research Journal of Engineering and Technology (IRJET) Volume 07 Issue-06 June 2020. [10] Swati D.Sambare: New Trends in Agriculture of Robot: International Research Journal of Engineering and Technology(IRJET) 2019.
Copyright
Copyright © 2022 Rohit Killampalli, Thirunahari Nagaraju, Valluru Rajendra Naidu, L. V. R Chaitanya Prasad. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET44068
Publish Date : 2022-06-10
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online