

Ijraset Journal For Research in Applied Science and Engineering Technology
Adaptive Headlights System for Four Wheelers: A Review
Authors: Shubh Brahmbhatt, Harmish Panchal, Meet Patel, Vikas Thakkar, Prof. Krupal Shah, Prof. Bharat Dogra
DOI Link: https://doi.org/10.22214/ijraset.2022.41476
Certificate: View Certificate
Abstract
This paper focuses on the review of design and working of a microcontroller based Adaptive Headlight System (AHS) for automobiles. The main purpose of this system is to present a cost-effective technique to illuminate blind spots while driving in the night and during the times when the visibility is reduced significantly to make the objects visible in those darkened locations and thereby prevent accidents. The system functions in accordance to the controlled input from microcontroller unit which drives the stepper motors connected to the headlights. The system is also designed to receive input from the indicator switch wherein a full turn is achieved by the headlight mirror when the indicator input is given. Also, the adaptive headlights are automatically switched on when the amount of light measured by a photo diode falls below a threshold, thereby eliminating the need for the driver to switch on the headlights.
Introduction
I. INTRODUCTION
Accidents during night have become very common in the current scenario. Automobiles have headlights that lights up the road in front of the vehicle and fails to provide illumination at bends. Reasons like lack of visibility, inability to view objects at the corner of a turn have plagued automobile drivers during late night travel. To overcome these situations, several mechanisms have been sought after to mitigate once an accident occurs but there were not many solutions proposed to prevent an accident even before it occurs.[1] The main reason for accidents in roads having steep turns and curved roads in hilly areas is due to the presence of blind spots. Blind spots are the areas around the vehicle that cannot be directly observed by the driver. These areas cannot be seen directly by looking forward, backwards or by looking through either of the side mirrors. Blind spots may occur due to inappropriate positioning of the vehicles’ side mirrors, thickness of the A-pillar, height and width of the vehicle, etc. Other causes of blind spots are steep curves in roads, lack of visibility due to weather conditions etc. Blind spots can occur due to the condition of the driver as well. Poor infrastructure, like improper streetlights create problems for the driver, mainly on the highways. These blind spots must be eliminated for safe driving. Temporary blindness of the driver can occur due to dazzling of headlamps.[3] Dazzling occurs when the headlights of the vehicle coming in the opposite direction falls directly into the eyes of the driver. This result in the driver being blinded for some time and in turn increase the probability of accidents.
This problem is more prevalent when the road is curved. A vehicle with normal headlights sends the light rays tangential to the curve. Thus, the probability of dazzling of lights in the eyes of the driver of the vehicle coming in the opposite direction is very high. This driver, with his eyes momentarily blinded, can go off the curve and off the road and create a major accident, hence, killing him and others on the road. There are also instances where the driver fails to switch on the head lamp during night or when the visibility is not sufficient to guarantee safe driving, accidents occur especially in highways.[4] Hence a mechanism to ensure that the headlights are properly functional and appropriate according to the driving conditions is much needed. Thus, there must be a cost-effective mechanism to address the problems of blind spots, dazzling of head lights and low visibility. In this paper, the proposed system is one such solution that helps in preventing an accident by providing proper visibility to drivers by illuminating curves and bent paths such that the driver can be cautioned before he hits any object or life. The headlights when in high beam cause temporary visual impairment of human eyes called the Troxler effect. While it reduces the time to react, it also leads to decreased visibility which contributes to the majority of mishaps that occur at night.[25] Head lamps are turned on automatically is required. This mechanism again is incorporated only in high end cars like BMW, Audi, Volvo etc. In order to incorporate this mechanism in low end cars, a cost effective and efficient method is the need of the hour. This can be incorporated by mounting a photo diode on the windshield behind the internal rear-view. Only 25% of the driving is done at night time, but 55% of the driving accidents occur during this period with compared to day time accidents. [23]
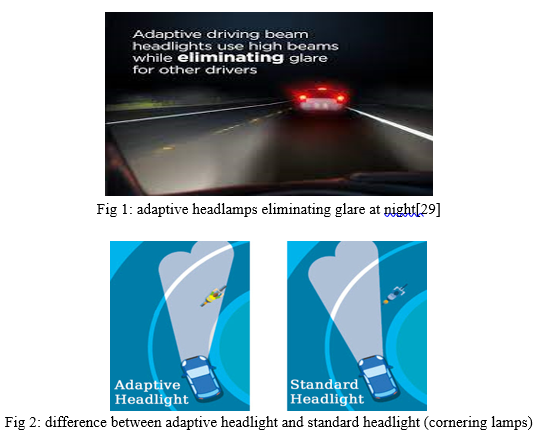
Adaptive headlights are for safer driving and avoid blinding other vehicles or pedestrians. They adapt better to driving conditions as well as improve driving in adverse weather. Sensors are connected to a computer to measure changes in adaptive headlights with self-levelling systems.[5]
II. LITRATURE REVIEW
Kobayashi et al discussed the new standard for cornering light system allows not only the conventionally approved ON-OFF control mode interlocked with operation of the turn signal switch but also an automatic ONOFF control according to steering wheel angle. The active cornering light system (ACL System) on the new DELICA D:5 have a dedicated ECU to control the operation of lamps. In addition, the light distribution of the ACL System is co-ordinated with that of the high intensity discharge headlights to offer higher night-time visibility of road shoulders at intersections. In recent years, global harmonization of automotive regulations has led to changes in Japanese vehicle equipment and design. This paper also introduced change in regulatory requirements regarding lighting equipment’s and the accommodation of such changes by the vehicle design. [1].
Chi on-Dong lin et al, proposed by car light piloting system objective of the present invention is to provide a steering wheel controlled car light piloting system which automatically turns the lights of the motor car to coincide the projections of the lights with the steering direction of the motor car accordingly. The present invention comprises an electric contact mechanism consisted of electric brushes and metal contacts dispose around the steering column of the steering wheel of a motor car, a motor drive consisted of at least one servomotor, a control circuit connected between the motor drive and the electric contact mechanism to control the revolving direction to the turning direction of the steering wheel, and a transmission mechanism consisted of at least one hydraulic cylinder systems and controlled by the motor drive to turn the light of motor car causing them to coincide with the steering direction of the motor car. [2].
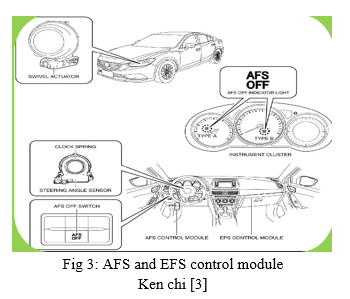
Ken Chi Nishimura et al, suggested that the apparatus for automatically adjusting a direction of a light axis of the vehicle headlight includes a steering angle sensor detecting a steering angle of steering wheel of a vehicle and swivel control unit performing swivel control by which the direction of the light axis of the vehicle headlight is adjusted to the target direction-Ing accordance with the steering angle detected by steering angle sensor. The swivel control unit varies sensitivity or responsiveness of the swivel control depending on a value of steering angle detected by the steering angle sensor. The direction of the optical axis of each swivel light is adjusted based on a swivel control angle obtained upon the application of filter. A filter is changed to change a response in swivel adjustment of a direction of an optical axis of each swivel light based on steering angle variation of a steering angle of steering wheel measured with a steering angle sensor. A weaker filter is selected if the steering wheel quickly steered, and a stronger filter is selected if the steering wheel is slowly steered. By this filtering operation the direction of the optical axis of each swivel light is adjusted in response to the steering operation of the steering wheel without causing an uncomfortable feeling to a driver. [3] this works properly on the ECU UNIT linked with the steering angle sensor.
Hiroaki Okuchi et al, proposed automatic optical axis adjusting device for automatically adjusting direction of optical axes of front lights with respect to steering angle of steering wheel. An electronic control for automobile headlight using spherical sensor comprised of a metal ball surrounding by a fluid encapsulated in aspherical sensor which is connected to the spherical sensor system. Computer controlled unit is positioned on and close behind the headlight so that the metal ball cooperates with sensor within the spherical sensor system to make the headlight go so as to follow the car during turns. [4]
Heather Steiner et al. brown, electric control for automobile headlights output of each sensor arrangement is supplied to an ECU through a communication bus line. A value of a turning radius of a vehicle which is used for adjusting direction of optical axes of swivel lights is 12 computed based on the output of each sensor arrangement is obtained. An optical axis control angle is computed based on the normal computed values and is used to drive actuators to adjust the direction of the optical axes of the swivel lights.
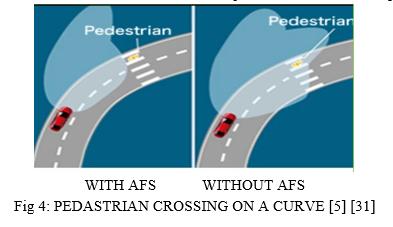
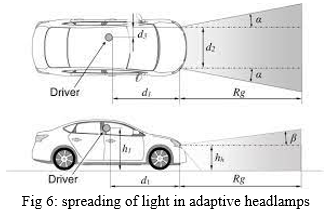
An automatic front light systems framework ensures better visibility to drivers by carrying the beam projections as the vehicle traverses [31]. As shown in Figure 1, using an AFS system, the beam lobes of the headlamp are varied according to the side where the vehicle takes a turn to improve the drivers’ perceivability of the road and avoid accidents involving pedestrians or other objects. This framework is a simple system that controls the headlamp divergence using a stepper motor.
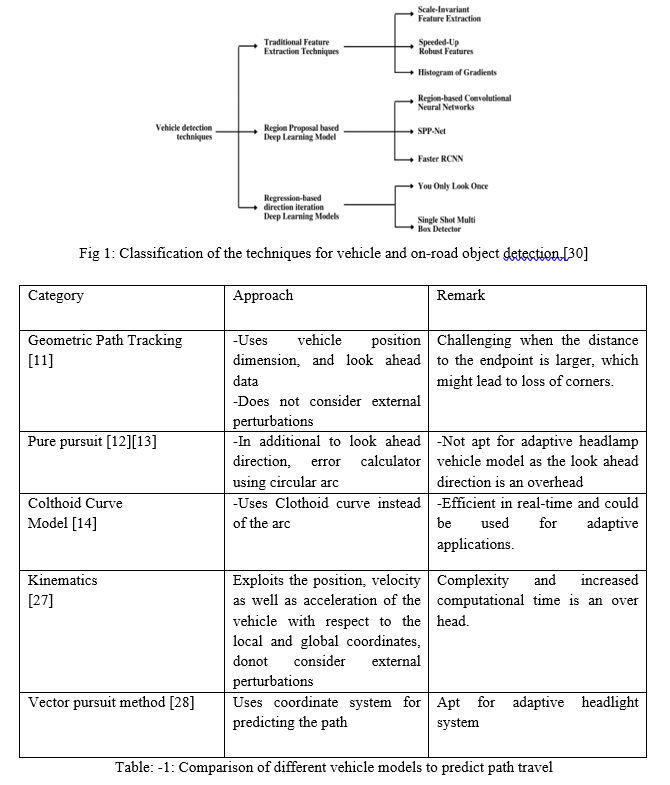
The article elaborates different vehicle detection approaches. The design of adaptive headlamps necessitates target detection and tracking to control the beam lobes effectively. The detection process identifies the object in the frame, and the tracking could be performed by repeatedly detecting the object in each frame. However, this is not preferred as it is a computational overhead in terms of speed and efficiency. Hence target tracking algorithms that use the data like size, shape, direction from the previous frame is used to anticipate the position in successive frames. This does not require a huge search in the frame, unlike the detection, hence improving response time. When target detection and tracking are performed simultaneously, the possibility of detection failure cannot be ruled out as it depends on the object features extensively.[5] However, a tracking algorithm can still predict the next position based on speed and vehicle position from the previous frame. This section reviews various approaches used in object identification techniques suitable for the on-road applications as depicted and classifiers for detection.
Development of an Adaptive Headlamp Systems [22] in which 8bit microcontroller PIC16F877A used and build of steerable headlights from conventional static headlamps has been achieved. Moving the headlights from left to right or vice versa continuously corresponding to a sensor is achieved an advantage of the developed headlight system is in its high adaptability as it can be easily configured to fit within space confines of a variety of vehicle designs.
Dubal Priyanka M et al, have presented modelling and simulation on adaptive front light system for vehicles to reduce the number of accidents taking place during night times. According to this paper it has been said that accidents occur due to no proper illumination of lights at the curves of the roads. Driving the car with conventional headlight system is unsafe because as it does not provide proper light in proper direction for safe drive. So, they have proposed new system which is a AFS (Adaptive Front light System) which will sense the corner of road with the help of camera and ultrasonic distance sensor and provide illumination of light accordingly. They have used MATLAB for processing he captured image and according to the output the headlight is moved to avoid blind spot and increase drive safety during night time.[24]
The concept of adaptive headlamps is not new in high end cars like Volvo, BMW, Audi etc. where in these mechanisms are already employed but a rather different approach has been taken in doing so. These vehicles used expensive sensors to measure speed, steering angle and yaw, which is the degree of rotation around the vertical axis and small electric motors to turn the cars’ headlights and to guide the driver along the bends of the roads. Due to sophisticated devices being used in these cars the cost is as high as $1000. The second approach is the use of Hardware in the loop simulations, a mathematical approach, where the headlamp orientation control system rotates the right and left low beam headlights independently and keeps the beam as parallel to the curved road as possible to provide better night-time visibility. Here two hardware platforms are employed where the first platform simulates the vehicle and road models, and the other platform simulates the Adaptive Headlamp System controller which obtains the necessary vehicle states from the first platform and carries out the necessary AHS computations. This second platform then sends the calculated commands to the headlight positioning electric motors.
Furthermore, actuator-based mechanisms have also been tested and developed for adaptive headlight systems where in a microcontroller is used. A potentiometer-based sensor is attached to the steering shaft which provides the sensing input to the microcontroller unit in the form of voltage. Servomotors with built in feedback mechanisms were used as actuating blocks that receives the microcontroller output to turn the headlamp.
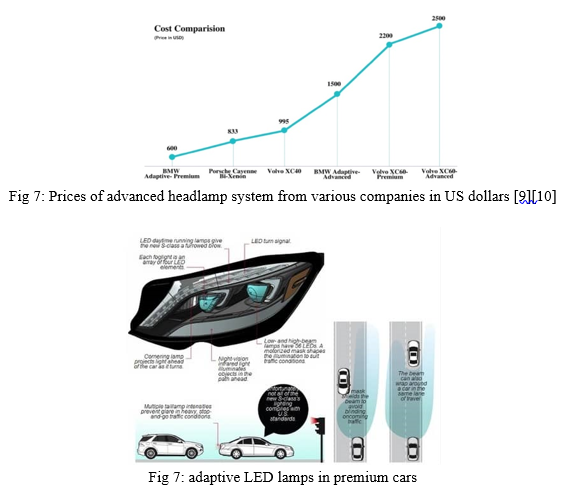
In addition, companies like Hella, Volvo, Toyota Corporations, BMW, and Mercedes Benz have developed their company-specific models and have patented a few. A comparison of the pricing of a few adaptive headlamps is depicted in figure [7]. Porsche Dynamic Light System (PDLS), Chevrolet Interbeam, Genesis Adaptive Cornering System (ACS), Mazda Adaptive LED Headlights (ALH), Ford Auto High-Beam Headlamps, Mercedes-Benz Intelligent Light System, Subaru: Steering Responsive Headlights, Lexus Adaptive Front Lighting System, Volkswagen Dynamic Cornering Light, and Lincoln Adaptive Pixel LED Lighting are the market competitors in the adaptive headlamps [7].
As the steering wheel rotates, the gear mounted on steering column also rotates and the rotation is further transferred to the semicircular gear due to meshing of semicircular gear with steering column gear. At the initial stage the headlight is at mean position and the pivot point of the gears moves in the slotted guide plate. At the mean position the pin is at the midpoint of the slot and with the movement of headlight towards extreme left or right position, the pin also transverses the distance away from the mean position of pin in the slot. Now when the semicircular gear rotated the linkage attached to the semicircular spur gear also rotates and it helps to transmit the motion to the headlight. If the steering wheel is rotated clockwise then semicircular gear rotate in anticlockwise direction. Then the left side linkage will pull the headlight, and this will result in the rotation of headlight in leftward in the same way the headlight is rotate in the rightward direction. Also, one of the noble ideas behind the steering control headlight is the voluntary engaging and disengaging of the headlight with the steering column at the drivers will. This makes the mechanism more versatile and contributes significant advantages over the previously designed mechanisms. During engaging the pivot moves inside the curved path over the guide plate which makes the semicircular gear to move towards steering column gear and get mesh with it. Engaging mechanism is advantageous on terrain having sharp turns such as hilly areas in night where visibility at turns can contribute significant part to the overall safety.
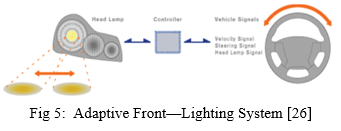
The researches on AFS are gradually being carried out. ALC (Adaptive Light Control) system of BWM Company obtains front light adaptive control signal from steering wheel angle sensor, velocity sensor, deflection angular velocity sensor and GPS navigation technology to adjust the horizontal and vertical swing angle. Active style front light of ALS (Adaptive Light System) of Benz company adjusts the swing angle of front light almost equal with front wheel steering angle, which can lift the range of effective lighting above 90%. The AFS (Adaptive Forward Light System) developed by Opel and Hella include two parts: curve light control and turning light control. Curve light is mainly used at Continuous curve whose radius is relatively big. The module of turning light control takes effect when velocity is under 50km/h, so it doesn’t take action in freeway. Audi has employed a suit of forwardly active assistant lighting system on curve roads, which helps to illuminate the turning area. The system gets work when velocity is above 70km/h, and the maximal turning corner is 15 degrees. Lexus has also exploited AFS which controls the front light. [8]
III. ACKNOWLEDGEMENT
We are overwhelmed in all humbleness and gratefulness to acknowledge our debt to those who have helped and supported us to move this paper well above the level of simplicity and into something concrete.
We would like to express our heartfelt gratitude to The Indus Institute for Technology and Engineering (IITE), Indus University, Rancharda, Gujarat, India, for enthusiastic encouragement and support for this paper.
We would also like to express our sincere gratitude to our review panellists for their valuable suggestions which helped us to make this project a success. Finally, we thank our friends, parents and relatives for giving support to do this work.
Conclusion
The Adaptive Front Lighting System is a system which regulates automatically the light distribution of a vehicle. A specific control algorithm is developed for different driving conditions – curve roads and incoming vehicles. AFS can be formally defined as maintaining a presumptively desired light distribution adapted to the above road environment. The system tested does so by way of input from in-vehicle parameters like steering wheel angle and distance between incoming vehicle and subject vehicle etc. The horizontal headlight movement through movement of steering shaft and vertical movement of headlamp due to distance between the two vehicles hived by the means of AFS system architecture. Few critical design factors considered during inception stage were ease of availability, affordability and reliability of the components use. It is also observed that the system can be accommodated in the current low-cost models without major changes. AFS appears to offer potential for a favourable night driving behaviour potentially reducing accident risk, compared to standard headlights. Night time driving with conventional headlights is particularly unsafe.
References
[1] Shreyas S, Karthala Raghuraman, Ramavath AP, S Arun Prasad, G.Devaradjane Madras Institute of Technology, Anna University Chennai, Adaptive Headlight System for Accident Prevention, April 2014 [2] India Miftah Hariri and Anwar B. Abu Bakar Department of Mechanical Engineering International Islamic University Malaysia [3] Kuala Lumpur, Development of an Adaptive Headlamp Systems, volume 11-13, May 2010 [4] Peng Fei Song, Yang Zhang, Xinglong Wu and Yufan Lan School of Instrument Science and Opto-electronics Engineering Hefei [5] University of Technology Hefei, China, Design and Implementation of the Adaptive Control System for Automotive Headlights [6] Based on CAN/LIN Network, 2013 [7] Jiae Youn, Meng Di Yin, Jeonghun Cho, and Daejin Park School of Electronics Engineering, Kyungpook National University [8] Daehakro, Bukgu, Daegu, 702-701, Republic of Korea bolt and nut kYoun, Meng Di Yin, Jeonghun Cho, and Daejin [9] Park School of Electronics Engineering, Kyungpook National University Daehakro, Bukgu, Daegu, 702-701, Steering Wheel-based [10] Adaptive Headlight Controller with Symmetric Angle Sensor Compensator for Functional Safety Requirement, 2015 [11] Jyotiraman De 2014 IEEE International Conference on Vehicular Electronics and Safety (ICVES) December 16-17, 2014. [12] Hyderabad, India, UNIVERSAL ADAPTIVE HEADLIGHT SYSTEM [13] Design Of Machine Element, V.B. Bhandari, R. S. Khurmi. [14] https://ieeexplore.ieee.org/document/9449667 [15] S. Szymkowski. (2019). Improved Optional Headlights Net Volvo XC40, XC60 Top Safety Pick Awards, The Car Connection. Accessed: May 31, 2021. [Online]. Available: https://bit.ly/2R7406q 9 [16] S. Szymkowski. (2021). 2021 Subaru Forester Prices Rise a Bit, But SUV Gets More Safety Kit, Roadshow. Accessed: May 31, 2021. [17] J. Wang, J. Steiber, and B. Surampudi, ‘‘Autonomous ground vehicle control system for high-speed and safe operation,’’ Int. J. Vehicle Auto. Syst., vol. 7, no. 12, p. 18, 2009, doi: 10.1504/ijvas.2009.027965. [18] R. C. Coulter, ‘‘Implementation of the pure pursuit path tracking algorithm,’’ Robot. Inst., Carnegie-Mellon Univ., Pittsburgh, PA, USA, Tech. Rep. CMU-RI-TR-92-01, 1992. [19] J. Wit, C. D. Crane, and D. Armstrong, ‘‘Autonomous ground vehicle path tracking,’’ J. Robot. Syst., vol. 21, no. 8, pp. 439–449, Aug. 2004, doi: 10.1002/rob.20031. [20] S. Thrun et al., ‘‘Stanley: The robot that won the DARPA grand challenge,’’ J. Field Robot., vol. 23, no. 9, pp. 661–692, Sep. 2006, doi: 10.1002/rob.20147 [21] Meftah Hrairi and Anwar B. Abu Bakar, “Development of an Adaptive Headlamp Systems,” IEEE Transaction on Computer and Communication Engineering (ICCCE 2010), 11-13 May 2010 [22] Conclusive review on Adaptive headlight system for four-wheeler front light using stepper motor. Aug 2018 by Onkae Deshpande [23] Priyanka M Dubal, Dr.Alam N. Shaikh, “Adaptive Head-Light System for Vehicle”, International Journal of Engineering Research in Computer Science and Engineering, Vol 5,Issu 2,February 2018. [24] Adaptive headlamps in automobiles - a review on detection techniques and mathematical model by Glenson Toney and Cherry Bhargava June 2021 [25] https://www.nissan-global.com/EN/TECHNOLOGY/OVERVIEW/afs.html. [26] G. V. Raffo, G. K. Gomes, J. E. Normey-Rico, C. R. Kelber and L. B. Becker, \"A predictive controller for autonomous vehicle path tracking\", IEEE Trans. Intell. Transp. Syst., vol. 10, no. 1, pp. 92-102, Mar. 2009. [27] Y. Kuwata, J. Teo, S. Karaman, G. Fiore, E. Frazzoli and J. How, \"Motion planning in complex environments using closed-loop prediction\", Proc. AIAA Guid. Navigat. Control Conf. Exhib, pp. 7166, Aug. 2008. [28] AAA’s research sheds light on the importance of allowing Adaptive Driving Beam Headlights on U.S. roads [29] Adaptive Headlamps in Automobile: A Review on the Models, Detection Techniques, and Mathematical Models [30] H. Dahou, R. E. Gouri, K. Mateur, M. Alareqi, A. Zemmouri, A. Mezouari, et al., \"New design of an intelligent system (AFS) of automobile with digital PWM technique on FPGA board\", ARPN J. Eng. Appl. Sci., vol. 12, no. 3, pp. 672-680, 2017.
Copyright
Copyright © 2022 Shubh Brahmbhatt, Harmish Panchal, Meet Patel, Vikas Thakkar, Prof. Krupal Shah, Prof. Bharat Dogra. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41476
Publish Date : 2022-04-14
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online