

Ijraset Journal For Research in Applied Science and Engineering Technology
Review on Advanced Obstacle Avoidance Techniques for Arduino-based Intelligent Vehicles
Authors: Prof. Shamsa Yasini, Rakshanda Sonekar, Shubham NaginaT, Bisheshwar Yadav, Megha Zhodape
DOI Link: https://doi.org/10.22214/ijraset.2023.56084
Certificate: View Certificate
Abstract
Robotics is a rapidly expanding and fascinating field in the modern world. Because of its high level of intelligence, a smart car can utilize all of the available space. This thesis presents the design and execution of a self-driving, obstacle-avoiding Smart Car that uses an ultrasonic wave sensor. The goal of the project is to create a Smart Car that can move around obstacles by employing ultrasonic sensors. To carry out the needed procedure, an ATmega328 microcontroller is employed. A machine that can work automatically or with instruction is referred to as a smart car. The proposal suggests a smart car that can self-steer when an impediment is in its way since it has intelligence built into it. A microcontroller from the AT mega 328 series was used to construct this Smart Car vehicle. Any obstruction in front of it is detected by an ultrasonic sensor, which then sends an instruction to the microcontroller. The microcontroller instructs the Intelligent Car to travel in a different direction based on the signal that it receives by activating the motors that are connected to it by a motor driver. The roadblock avoidance distance may be calculated by emitting pulses. We can simultaneously manage the steering to carry out the function of obstacle avoidance. The Smart Car has rear wheel drive and front axle steering. Two electric motors using gear reduction systems power two driving tires. Using an Arduino MCU microchip as the brains of the Smart Car\'s control system. We construct our Smart Car platform while achieving positive experimental results through the design for both the software and the hardware systems.
Introduction
I. INTRODUCTION
This Smart Car is intelligent enough to use all of the available space. It has an ultrasonic sensor that it uses to detect objects blocking the path of the smart car. It can move in a specific direction to get around the obstruction in its way. To make the Smart Car move, we used two D.C motors. The Smart Vehicle circuit is simple and compact to build. The Smart Car circuits' electronic components are readily available and reasonably priced. avoidance of obstacles The Smart Car is built to travel in an uncharted environment by preventing crashes. avoiding obstacles The Smart Car detects obstructions in its route, avoids them, and then continues to move. There are several highly well-liked navigation techniques for smart cars, including wall-following, edge recognition, line-following, and many others. Edge detection is a more generic and widely used approach for obstacle avoidance. The requirement for the Smart Car to halt in front of an obstruction in order to obtain a more precise measurement is a drawback of avoiding obstacles based on edge detection. All transportable Smart Cars have some form of collision avoidance, which can range from simple algorithms to detect an obstruction and cause the Smart Car to halt to prevent a collision to more complex algorithms that allow the Intelligent Car to detour barriers. The later algorithms are more complicated since they detect obstacles and perform some kind of quantitative assessment of the obstacle's dimensions. Once these are identified, the obstacle avoiding algorithm must direct the Smart Car past the obstruction and then restart motion towards the original objective. The Smart Car won't have to halt in front of an obstruction during navigation thanks to the steering algorithm. A micro-controller receives an instruction from an ultrasonic sensor when it detects an obstruction in front of it. Thus, Smart Cars might be able to get around some of the above-discussed navigational issues and operate smoothly while avoiding collisions. if the IR sensor were used Infrared sensors use infrared radiation to gauge an object's distance.
II. OBJECTIVES
Following is a comprehension of the project's primary goals:
- In order to avoid obstacles, Without running into nearby objects, the Smart Car can manoeuvre through an unknowing surroundings.
- Based on a preset threshold distance, the Smart Car will be able to identify obstructions in its path.
- After spotting an obstruction, the Smart Car might choose on its own to change to a more open path.
- During its operation, it wouldn't need any outside guidance.
- It has a real-time capability for gauging the separation between itself and its surroundings.
- It could work well in an uncharted setting.
III. LITERATURE SURVEY
We reviewed different obstacle detecting Smart Car mechanisms that have been built by a lot of students and other practitioners that are in existence.
For an autonomous mobile Smart Car performing a navigation-based task in a vague environment, to detect and to avoid encountered obstacles is an important issue and a key function for the Smart Car body safety as well as for the task continuity. Obstacle detection and avoidance in a real-world environment that appears so easy to humans is a rather difficult task for autonomous mobile Smart Cars and is still a well-researched topic in robotics. In many previous works, a wide range of sensors and various methods for detecting and avoiding obstacles for mobile robot purposes have been proposed. Good references related to the developed sensor systems and proposed detection and avoidance algorithms can be found.
We examined various obstacle detection systems for Smart Cars that have been created by numerous students and other professionals. The detection and avoidance of encountered impediments is a crucial challenge for the body safety of the autonomous mobile Smart Car as well as on the task continuity when performing a navigation-based activity in an ambiguous environment. While recognizing obstacles and avoidance in the real world may seem simple to humans, it is a challenging issue for autonomous mobility Smart Cars it is still an active area of robotics study. For the goal of mobile robots, a variety of sensors and techniques for identifying and avoiding obstacles have been presented in numerous earlier publications. The created sensor systems and suggested detection or avoidance algorithms have solid references available.
Diverse approaches linked to this topic might be categorized based on these created sensor systems. Aamir Attar, Aadi Ansari, Abhishek Desai, Shahid Khan, and Dipashri Sonawale have designed and developed "line follower and obstacle avoidance bot using arduino" to create an autonomous Smart Car that intelligently detects obstacles in its path and navigates in accordance with the actions that user set for it.
This system therefore offers an alternative to the current system by substituting robotic machinery for trained labour, which in turn allows it to handle more patients with more accuracy and at a lower overall cost [1].
Aniket D. Adhvaryu et al. have proposed that the "Obstacle-avoiding robot having IR and PIR movement Sensors" was created and built as a general wheeled independent platform rather than for a specific mission. As a result, it can be applied in the fields of education, research, and business. Students can use it to learn about the features of IR and PIR sensors, motor driving circuit design, signal condition circuit design, programming a microcontroller using C++, and Arduino Uno 1.6.5 compiler. At the polytechnic level, research on obstacle-avoiding robots can aid students in building communication skills, technical proficiency, and collaboration. Such a robot's design is relatively adaptable, and different techniques can be used for different implementations. It demonstrates that PIR detectors are better capable of detecting people than IR sensors [2].
Vaghela et al.'s "Obstacle Avoidance Robotic Vehicles Using Ultrasonic Sensor, Android, and Bluetooth in Obstacle Detection" mentions the extensive research that has been conducted regarding wireless gesture control of robots. Under diverse operational and functional strategies, a variety of approaches have been examined and analyzed, along with their benefits and drawbacks. The user-friendliness, portability, and light weight of Android OS-based smartphones have therefore surpassed the sophistication of technology like programmable gloves, static cameras, etc., rendering them obsolete. Although recent studies in this area have made wirelessly gesture controlling a common occurrence, it still has to be given more collaborative attention in areas where it can be used, such as for household appliances, wheelchairs, fake nurses, tabletop screens, etc [3].
The "Obstacle Avoidance Robot" was created and developed in Paul Kinsky. According to Quan Zhou, the robot may be equipped with a few mechanical parts to add two more features to its basic body, namely a laptop holder and a camera holder. The AT89S52 development board, which was used to smoothly regulate the motors, was created, produced, and tested on a big scale. For proper computer vision calibration, the very inexpensive cameras are fixed or adjusted on a camera holder. Users set up a serial communication channel using a USB port between the higher laptop and the smaller development board. The laptop will notify the development board about the motor condition [4].
"Obstacle avoidance car" was created and developed the Faiza Tabassum, et al., who noted that Obstacle Successful obstacle detection and avoidance by the car. Simple steering algorithms reduced the turning radius and successfully guided the vehicle. In conclusion, the team successfully interfaced all of the original scheduled components. IR pulse production during timer interruptions. IR transceiver-based obstacle detection. Servo system utilizing PWM. utilizing Lego and a servo to steer [5].
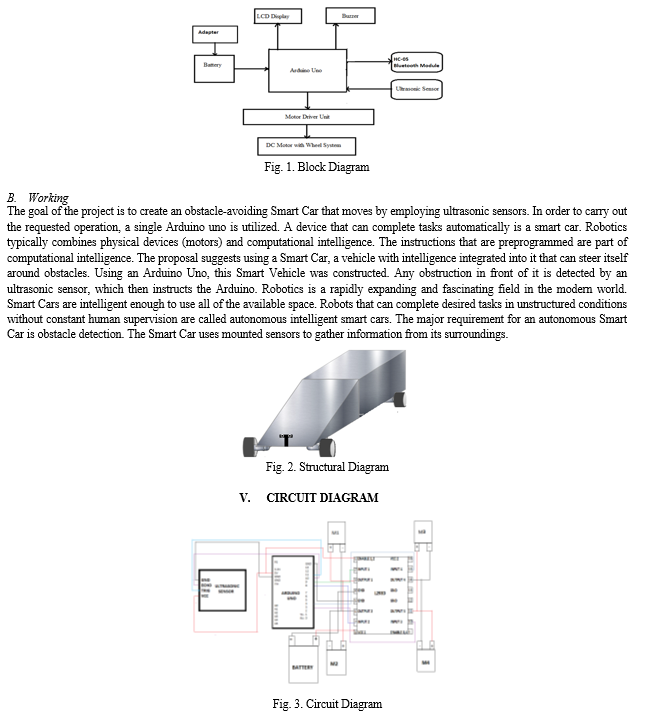
IV. PROJECT METHODOLOGY
A. Block Diagram
VI. APPLICATIONS
This tool may be used to map and survey a variety of terrain. It can also be applied to commercial products like automated lawn mowers, smart room cleaners, obstacle avoidance systems, etc. Nearly all cellular Smart Car navigational systems support Smart Cars.
- Additionally, they can be employed in hazardous conditions where human penetration might be lethal.
- Driving an unmanned vehicle.
- Mining Equipment with Obstacle Detection.
VII. ADVANTAGES
- Collision control.
- It provides Safe Navigation.
- This is the basic of all Smart Car and has a wide scope of extensions.
- Protect the human life.
VIII. LIMITATIONS
- The performance of this Smart Car mainly de pends on the sensors and number of sensors.
- The ultrasonic sensor used here is of commercial application so it may easily undergo interference.
Conclusion
Today, we live in a robotics-based environment. Whether we realize it or not, we use a variety of Smart Cars within our daily lives. \"Obstruction detection and the avoidance\" is the project\'s name. \"Smart Car\" is demonstrated in practice by utilizing an ultrasonic sensor to detect it, a motor shield driver to move the dc motors, and an Arduino microcontroller to regulate the movement of the dc motor.
References
[1] Ajay Krishna Gamidi, Saran Reddy Ch,Aravind Yalla, R.Augustian Issac, International Journal of Emerging Technologies in Engineering Research (IJETER) Volume 6, Issue 10, October (2019). [2] R. Fazli and A. Fattahian, \"Design and implementation of an obstacle avoidance robot based on Arduino microcontroller,\" Journal of Intelligent & Fuzzy Systems, vol. 36, no. 6, pp. 5455-5463, 2019. [3] H. Liu, J. Xiong, and Z. Xiong, \"Obstacle avoidance and navigation of mobile robot based on ultrasonic sensor and Arduino,\" Journal of Physics: Conference Series, vol. 1156, no. 4, p. 042002, 2020. [4] Akrati Pithode , Harsha Wagadre , Neha Verma , Riya Rathore ,” Obstacle Avoiding Robotic Vehicle Using Arduino “ International Journal of Engineering Applied Sciences and Technology, Vol. 5, Issue 1, 2020. [5] Ekta1, Kumar Manu2, Yash Dhawan1, and Raj Kumar Saini1 , \"Obstacle Avoiding Robot \" International Journal of Engineering Sciences & Emerging Technologies, July. 2021 . [6] Yashashvi Gour1 , Unnati Ninawe2 , Ruchita Tetu3 , Mohit Bhoge4 , Prof. Mr. Harish Gorewar5 , “Obstacle Avoiding Robot Car By Using Gsm Modem To Get Alert Message”, International Journal of Advanced Research in Computer and Communication Engineering Vol. 10, Issue 7, July 2021. [7] Tamilarasan.S , Swetha.M , Swathika.J , Suresh Kumar. “Obstacle Avoidance Robot”, IJARIIE /Vol-8 Issue-3 2022.
Copyright
Copyright © 2023 Prof. Shamsa Yasini, Rakshanda Sonekar, Shubham NaginaT, Bisheshwar Yadav, Megha Zhodape. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET56084
Publish Date : 2023-10-10
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online