

Ijraset Journal For Research in Applied Science and Engineering Technology
AI Integrated Vehicular Robot Having Accident Prevention System from Static Obstacles
Authors: Arif Ali Mansuri, Aditi Singh, Manas Singh, Ujjawal Goel
DOI Link: https://doi.org/10.22214/ijraset.2022.42701
Certificate: View Certificate
Abstract
Transportation plays an increasingly vital role in our lives these days, and its advancement has made our lives much easier. However, in recent years, we have seen people attempt to circumvent traffic signals, resulting in devastating road accidents and fatalities. Dozing and alcohol use produce intrusiveness, necessitating immediate action before a mistake occurs. In this study, a prototype is created utilising an Arduino Uno, a camera, and ultrasonic sensors for monitoring, with the goal of preventing accidents and providing drivers with safety aid.[10]. For recognising the front side and averting an accident, the system uses Internet of Things, machine learning, and artificial intelligence (AI) in automobiles. Several lives have been saved by vehicles stopping whenever they perceive a red light or a stationary obstruction in front of them, as well as warning the driver via a sound system. The device has been put to the test, and the findings demonstrate that it is efficient and effective.
Introduction
I. INTRODUCTION
Robotics is a very intriguing research subject that is rapidly increasing in our world today since it is the simplest approach to change modern technologies. Robotics is important in the evolution of technology, which is why I chose to work in the field of robotics and design something clever to make human life easier. An autonomous robot is one that can move around in an unstructured and unfamiliar area without any external assistance. The robot is able to do this thanks to the software intelligence contained in it, which allows it to sense the environment, recognize any obstacles in its route, and navigate the environment by avoiding them [1]. There are numerous robotic designs that can be used in the creation of an autonomous robot.[5]
The physical environment in which the robot will be operated is the most important thing to consider when choosing a design to employ. Walking robots, drones, robotic automobiles, and snake robots are all examples of autonomous robots. The obstacle-avoiding robot is intelligent enough to cover the maximum area of the available space, and it contains an ultrasonic sensor that detects any obstructions in the robot's route, after which it moves in a direction to avoid the obstacle [2]. The major goal of such technology is to play a significant part in today's transportation by preventing accidents that occur frequently on congested highways by deploying emergency brakes. If this technology is utilized in a car, it will automatically detect any static objects in the automobile's route and apply breaks or take a side to the available empty space as needed.
A. Motivation
The concept of a self-driving robot is not new. Every organization that utilizes mobile robots to complete jobs wants the robot to be able to complete its work without the need for external control. However, before the robot is utilized, the issue of how it sees and interacts with its environment must be addressed. To address this issue, sensors are utilized to capture enough ambient data for the robot to interpret and navigate smoothly.
B. Aim and Objective
The Aim of this project is to design and implement a robot car that is able to move round an unknown environment without running into obstacles in its path.
The Objectives of the project are as follows:
- Based on a predetermined threshold distance, the robot car should be able to detect obstructions in its route.
- After detecting an obstruction, the robot should be able to make an autonomous decision to shift its trajectory to a comparably open path.
- The robot car should not require any external control during its operation.
- The robot car should be able to measure distance between itself and an obstacle in real time.
- The robot should come to a halt when it detects a red colour in front of it and resume when it detects a green colour.
II. PROBLEM STATEMENT AND SOLUTION APPROACH
A. Problem Statement
In many nations, traffic accidents are a big problem, with fast-moving automobiles frequently colliding. The flow of traffic is usually controlled by road breakers, traffic police wardens, and traffic lights to avoid collisions and accidents on the road. Even if a person is capable of adhering to traffic laws, weather conditions can change suddenly, and the driver is unable to control the situation. Another problem is the uncontrollable scenario in which falling asleep while driving can result in collisions with close objects. People sometimes try to avoid traffic signals, which can lead to dangerous situations. [4][13]
???????B. Proposed Solution
In the suggested system, an Arduino uno is used to detect static impediments utilising artificial intelligence and fuzzy logic.
This robot can mimic biological behaviours like avoiding obstructions and following walls, and it can also identify the stop sign in traffic rules. In this case, image processing is used. This robot recognises objects using an Arduino Uno and a camera with OpenCV image processing and the NumPy library. As a result, the object in front of the robot will be readily and precisely detected. We offered a robot that avoids obstacles in its way by moving left or right according to the path, as well as stopping it when a red colour appears in front of it. This robot was developed because many industries have large components that must be transported from one location to another, which is impossible without the assistance of machinery. With this, we came up with a concept and used Arduino Uno to create a robot called "AI Integrated Vehicular Robot with Accident Prevention System from Static Obstacles." Two TT MOTORS, often known as battery operated motors, were used. The motors were chosen because they use less power and can function well on a 9-volt battery. The robot circuit is simple and compact to build.
The Arduino uno, which serves as the robot's brain, is the essential component. The concept offered in this research is to direct the robot using computer vision, which is a branch of AI. The field of machine vision is rapidly expanding. From a technical standpoint, machine vision applications can be split into four categories. They're useful for finding, measuring, inspecting, and identifying things. Computer vision is used to guide the robot presented in this research. The finest feature of our invention is that if the robot encounters an impediment, it will automatically go left or right along the path, or halt on red colour and resume on green.
III. ARCHITECTURE
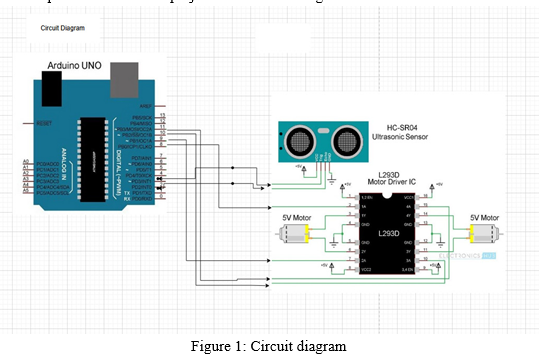
The architecture is very simple for this “AI Integrated Vehicular Robot having accident prevention system from static obstacles” Robot using Arduino uno. An Ultrasonic Sensor module, used for detecting objects, is connected at pin 2 and 3 of Uno. A Motor Driver is connected to Arduino for driving robot’s motors. Motor drivers are connected to Arduino pin number 8, 9, 10 and 11. Here we have used TT motors to drive the robot in which the motor is connected to the output pin 14 & 11 of motor driver IC. [6]
The circuit diagram for the implementation of the project is as shown in figure.
IV. SOFTWARE DESIGN
A. Arduino IDE
The Arduino Software (IDE) includes a text editor for writing code, a message box, a text console, a toolbar with buttons for basic functions, and a series of menus. It communicates with the Arduino hardware and uploads code to it. [9]
???????B. Anaconda Navigator.
Anaconda Navigator is a desktop graphical user interface (GUI) included in the Anaconda® distribution that allows you to quickly manage conda packages, environments, and channels without having to use command-line commands. It runs on Windows, Mac OS X, and Linux. Many scientific packages rely on certain versions of other programmes to run. Data scientists frequently utilise various versions of many software and isolate these versions using distinct environments. Conda is a package manager and an environment manager in one command-line tool. This allows data scientists to check that each version of a package has all of the dependencies it needs and functions properly.
???????C. Python
Python is a popular programming language, but experience indicates that business owners believe in Python development as well, and for good reason. It is popular among software developers because of its simple syntax and reputation as one of the easiest programming languages to learn. The idea that there is a framework for almost anything – from web apps to machine learning – is appealing to business owners and CTOs. Furthermore, it is more of a technical platform that has come together as a result of a massive collaboration between thousands of individual expert developers.[8]
???????D. Artificial Intelligence (Computer Vision)
Computer vision is a branch of artificial intelligence (AI) that allows computers and systems to extract useful information from digital photos, videos, and other visual inputs and then act or make recommendations based on that data. Computer vision is a branch of computer science concerned with assisting computers in seeing. Computer Vision (CV) is a branch of study that aims to create techniques that allow computers to "see" and interpret the content of digital pictures such as photographs and videos.[8]
V. HARDWARE DESIGN AND COMPONENTS
This section will discuss about components that had been used included
???????A. Arduino Uno
The Arduino Uno is an open-source microcontroller board based on the Microchip ATmega328P microcontroller and developed by Arduino.cc[2][3] The board is equipped with sets of digital and analog input/output (I/O) pins that may be interfaced to various expansion boards (shields) and other circuits.[1] The board has 14 digital I/O pins (six capable of PWM output), 6 analog I/O pins, and is programmable with the Arduino IDE (Integrated Development Environment), via a type B USB cable.[4] It can be powered by the USB cable or by an external 9-volt battery, though it accepts voltages between 7 and 20 volts. It is similar to the Arduino Nano and Leonardo.[5][6]The hardware reference design is distributed under a Creative Commons Attribution Share-Alike 2.5 license and is available on the Arduino website. Layout and production files for some versions of the hardware are also available.[12]
???????B. Ultrasonic Sensor
The ultrasonic sensor, as shown in Figure 3, is utilised to identify obstacles. The ultrasonic sensor transmits ultrasonic waves from its sensor head and receives reflected ultrasonic waves from an object.[7]
There are many applications use ultrasonic sensors like instruction alarm systems, automatic door openers etc. The ultrasonic sensor is very compact and has a very high performance.
???????C. TT Motors
Plastic gearbox motors (also known as 'TT' motors) are a simple and low-cost approach to get your ideas going.
This is a TT DC Gearbox Motor with a 1:48 gear ratio that comes with 2 x 200mm wires and 0.1" male breadboard connectors.
Suitable for use with a breadboard or terminal blocks. [11]
You may use 3VDC to 6VDC to power these motors; the higher the voltage, the faster they will run.
???????D. Camera OV7670 or Laptop Webcam
The Camera OV7670 works on 3.3V, so it becomes very important to avoid Arduino which gives 5V output at their Output GPIO pins. The OV7670 is a FIFO camera. But in this tutorial, the picture or frames will be grabbed without FIFO. This tutorial will have simple steps and simplified programming to interface OV7670 with Arduino UNO. [12]
???????E. Connecting Wires
Jumper wires are simply wires having connector pins on both ends that can be used to connect two places without the use of solder. Jumper wires are commonly used with breadboards and other prototyping tools to make it simple to switch out circuits as needed. Simple enough. Jumper wires are the most fundamental of all electrical components.[11] Although jumper wires come in a variety of colours, the colours have no significance. This means that a red jumper wire is the same as a black jumper wire. However, you can utilise the colours to distinguish between different types of connections, such as ground and power.[9]
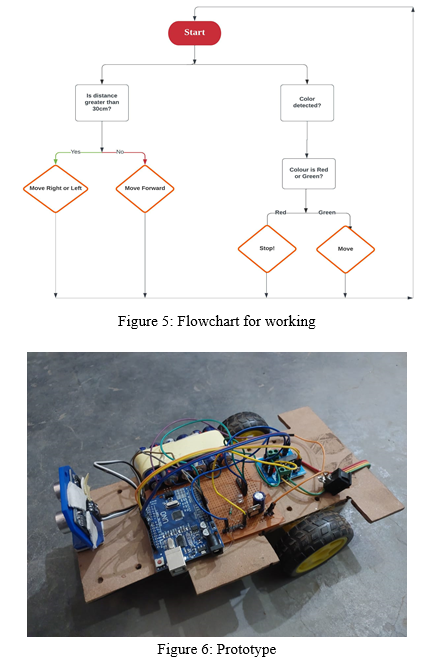
VI. WORKING OF ROBOT
Working of this Robot is very easy. The Robot is turned on when the command is given through Arduino IDE. It measures the distances of objects, in front of it, by using Ultrasonic Sensor Module and camera and stores in a variable.[12] Now we run the python file using Anaconda navigator where we have created a separate environment for our project. After giving few commands on the command line interface the camera is enabled and it detects the colours coming in front of it. Then Arduino Uno compares these distance value with predefined values and take decisions accordingly to move the Robot Left, Right, Forward, or to stop the robot if it founds red colour.[5]
Here in this project, we have selected 30cm distance for taking any decision by Arduino Uno. Now whenever Arduino Uno gets less than the 30cm distance from any object then Arduino Uno turns it left or right. Now before moving it forward again, it again checks whether any obstacle is present within the range of 30 cm distance, if yes then again repeats the previous process, else move the robot forward until it will detect any obstacle or object again. This distance can be changed depending upon the use-case.
 ???????
???????
Conclusion
In this paper, the accident prediction and avoidance system has been demonstrated. On the wheeled mobile robot, the recommended security mechanism has been implemented. Collision perdition has been proven to help prevent car accidents through range measurements. Smoothness in motion and using a distance control strategy to control the robot\'s movements. In numerous conditions, the robot successfully maintained a constant distance from the obstacles.[14] To get better outcomes, future work will focus on a well-defined sensor architecture and an enhanced version of this robot. We can use the Global Positioning Service (GPS) in this model to avoid barriers and arrive at a specific destination. We can also utilise the Raspberry Pi instead of the Arduino Uno to avoid having to use a computer system by burning the code into the Raspberry Pi.
References
[1] Mukhtar, A., Xia, L. and Tang, T.B., 2015. Vehicle detection techniques for collision avoidance systems: A review. IEEE Transactions on Intelligent Transportation Systems, 16(5), pp.2318- 2338. [2] P. Shunmuga Perumal, M. Sujasree, K. Siddhardha, K. Gokul P. Shunmuga Perumal, M. Sujasree, K. Siddhardha, K. Gokul [3] Vaghela Ankit1, Patel Jigar2, Vaghela Savan3 Obstacle Avoidance Robotic Vehicle Using Ultrasonic Sensor, Android And Bluetooth For Obstacle Detection” [4] Clint Nous, Roland Meertens, Christophe De Wagter and Guido de Croon Performance Evaluation in Obstacle Avoidance [5] Pandey A, Pandey S, Parhi DR (2017) Mobile Robot Navigation and Obstacle Avoidance Techniques: A Review. Int Rob Auto J 2(3): 00022. DOI: 10.15406/iratj.2017.02.00023Paul, O. (2019). Robotics [6] Faiza Tabassum?, Susmita Lopa?, Muhammad Masud Tarek? & Dr. Bilkis Jamal Ferdosi? Obstacle Avoiding Robot [7] Adam, A. (2019). Robotics. Retrieved from https://www.britannica.com/technology/robotics. [8] Artificial Intelligence. (2018). Retrieved from https://builtin.com/artificial-intelligence. [9] Rouse, M. (2020). What techtarget is artificial intelligence. Retrieved from https://searchenterpriseai..com/definition/AI-Artificial-Intelligence [10] Ryther, C. A., & Madsen, O. B. (2009). Obstacle Detection and Avoidance for Mobile Robots.Technical University of Denmark.NASA, [11] Banzi, M. (2008). Getting started with Raspberry Pi. California: O\'Reilly Media, Inc [12] John. (2018). Story and history of development of Arduino. Retrieved from https://www.circuitstoday.com/story-and-history-of-development-of-arduino [13] Anusha. S, Sandhya, \"G.Sa Literature Survey On Obstacle Detection And Their Movement For Automobiles\", International journal of innovative technology and research, ISSN 2320 -5547 [14] \"Obstacle Avoidance Robot Using Arduino \", Pavithra A C, Subramanya Goutham V, NCESC – 2018 (VOLUME 6 – ISSUE 13)
Copyright
Copyright © 2022 Arif Ali Mansuri, Aditi Singh, Manas Singh, Ujjawal Goel. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET42701
Publish Date : 2022-05-14
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online