

Ijraset Journal For Research in Applied Science and Engineering Technology
A Review of Alive Human Detection During Calamity and Landmine/Bomb/Human Detection in War Fields
Authors: Ujjwal Mishra, Sankalp Mishra, Ananya Shukla
DOI Link: https://doi.org/10.22214/ijraset.2022.43682
Certificate: View Certificate
Abstract
Many people lose their life when a natural disaster such as earthquake, tsunamis, windstorms occur. Similarly, in war-fields soldiers lose their life when they put their foot incidentally on landmines. This paper focuses on investigating, analyzing, and exploring the previous research papers on the alive human detection robot. The further modifications that have been done in the past are compared extensively in this paper. A quantitative analysis of the various technologies used in the past such as microcontrollers (Arduino UNO, Raspberry pi), sensors (PIR sensor for detecting the motion in the body, IR sensor) and other wireless technologies for data and instruction transmission (Bluetooth) is done in this paper. Further, methods have been devised in order to make the robot more effective.
Introduction
I. INTRODUCTION
Every year large number of people lose their lives in earthquakes, tsunamis, bomb explosions etc. It is often seen that the people get stuck under the debris and it is impossible for rescuers to find the person’s body as it is difficult for the rescuers to reach that place. In the same case, it is very risky for rescuers to take charge of their life in order to save life of others without even knowing whether the human is alive or not. Similarly in war-field areas, sometimes accidently put their foot over a landmine or when a bullet hits a soldier, they faint on the ground and it is very risky for other soldiers to risk their life without confirming whether the injured soldier is alive or dead. Any object with temperature is constantly radiating infrared rays to the outside world (radiation energy conc. wavelength range in case of humans is 8~12μm). A PIR sensor can detect these infrared radiations and can be used as an alarm. IR sensor can used to detect any obstacle in the way of the robot. Landmines, generally are made up of metals. A metal detecting sensor can be used to give the precisely accurate result in the detection of landmines. Oxygen concentration around the human body determine the proportional time for the fainted body will remain alive. Oxygen sensor can be of great use to us. Hence, it can act as an alarm for the rescuers to initiate the rescue operation as fast as they can. Bluetooth module can be used for wireless transmission of data and instructions between the HC – 05 Bluetooth terminal and the robot. A camera module can be used to get a real time footage of the of the area around the robot. The robot is integrated and is implemented using Embedded C in Arduino IDE.
II. REVIEW OF SOME PREVIOUS WORKS ON ALIVE HUMAN DETECTION ROBOT
Urban Search And Rescue Robots (USAR) [1] robots were first introduced for the detection of humans in the regions where rescuers cannot enter. These robots used simple ultrasonic sensors to detect whether the person is alive or not. The camera module is used to provide the proper path to the robot. However, the robot faced severe disadvantages which include the robot’s inability to detect the alive humans accurately to 100%. Many a times these robots got out of control of the controller remote. Moreover, the use of wheels made it difficult to move in the rough terrain.
Remote Operated and Controlled Hexapod (ROACH) [2] was developed to provide the advantage over the wheeled design as it used six mechanical legs which made it easier to move further in rough terrains. It also used the global positioning system to track the alive person’s position. KOHGA, a snake like robot was also developed to overcome the problem of movement in rough terrains.
Burion [3] presented a model which focused on utilizing sensors in order to provide more accurate information about the alive human body. This model used the pyroelectric sensor, microphones, IR camera for the correct detection. Pyroelectric sensor is used to detect the radiations emitting from the alive human body. The heat pattern can be detected using the IR camera. However, pyroelectric sensor faced a major drawback as its output was in binary form which required its conversion to analog form. Moreover, the IR camera also included the heat patterns of the objects nearby the human body, hence creating confusion.
Bahadori [4] suggested an approach that devises the use of image processing for the correct detection of the human body irrespective to the other objects present in the view. The introduction of machine learning to the robot along with the sensors made the robot much more accurate than before.
Viral Patel, Asha Gupta [5] proposed a model on “Alive human detection robot” which used the PIR sensor for alive human detection. However, they used GSM module in place of GPS module. The disadvantage of their proposed model include the improper functioning of GSM module in forest areas.
Purnima G, Asst. Prof. Aravind S [6] presented a paper on “Alive Human Body Detection Using an Autonomous Pc Controlled Rescue Robot” and it also utilizes PIR sensor to detect the alive human beings. It wirelessly transmits the data to the rescue operators. However, the proposed model lacks the camera module and hence cannot be guided accurately.
Sandeep Bhatia, Ajay Mudgil, Amita Soni [7] proposed a model on “Alive Human Body Detection system using an Autonomous Mobile Rescue Robot” in which they used accelerometer- based gesture detection method to classify the body as alive or not.
III. REVIEW OF SOME PREVIOUS TECHNOLOGY USED IN ALIVE HUMAN DETECTION MODEL
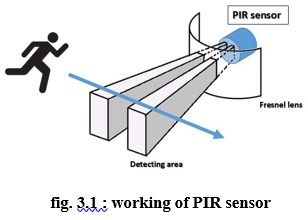
A. PIR Sensor
Passive Infrared radiation sensor can be used to check whether a body is alive or not. A human body when alive radiates heat from itself in the form of infrared waves. A Pair of pyroelectric sensors are used to detect the heat energy in the surrounding environment. PIR sensor is equipped with the Fresnel lens which is used to focus IR waves on the pyroelectric sensor.
B. Metal Detecting Sensor
A Metal detector can be used to detect the presence of metallic land mines in the war-field areas. The device uses two coils namely search coil and detector coils. The search coil is responsible for generating an electromagnetic field that travels towards the ground. When this electromagnetic field strikes a metal object, the metal objects create an electromagnetic field of their own which is reflected and is received by the detector coil. The change in electromagnetic energy is used to turn on an alarm.
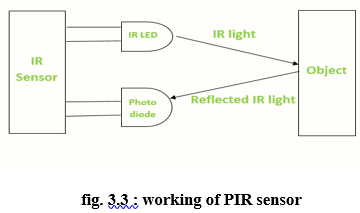
C. IR Sensor
The IR sensor is used here to detect the presence of the obstacles in-front of the robot. The general working principle of an IR sensor is that when an IR transmitter transmits an infrared ray, it moves forward and strike the obstacle after which it is reflected and are detected by the IR receiver confirming the presence of obstacle in front.
D. Temperature Sensor
A Temperature Sensor can be used to measure the temperature and humidity of the surrounding environment. A contact type temperature sensor is in simple words made up of a thermocouple which uses the concept of the Seebeck effect discovered in the year 1821. The generated voltage is directly proportional to the surrounding temperature which gives an indication towards the degree of hotness or coldness.
E. Oxygen Concentration Detecting Sensor
Oxygen detector sensor can be used to detect the amount of the oxygen concentration in the affected area. This helps us to detect whether the oxygen level in the affected area is sufficient for an alive person to survive or not. In case the oxygen level is not sufficient it will automatically alert the rescuers to act fast as they can (This device was never used in the past models and hence can be considered as an additional modification).
F. Arduino UNO
An Arduino UNO is an open-source microcontroller developed using ATMega328P. It has both digital I/O pins (16) and analog I/O pins (6) and operates on 5V input voltage. It has a flash memory of 32Kb. The power source is the USB port or by external 9V battery.
G. Bluetooth Module
The Bluetooth module can be used to provide a wireless control of the robot using the controller. The HC - 05 module uses serial communication for wireless control. It is used to provide a short- range control between the robot and controller. It operates at the frequency band of 2.4 KHz. However, for long range control, the Bluetooth module is quite disadvantageous.
H. Camera Module
A Camera module is used to provide a real time view of the environment where the robot is operating. The sensor in the camera module is used to convert the light after being illuminated from the object into an electrical signal which is then converted into the digital signal. However, due to the high cost of installation of the camera module the robot might become cost ineffective. Smartphones are an integral part of our life. We can use new feature using which we can use any smartphone camera in place of the camera module. The App “Ip webcam” can be used for this purpose (This use of Ip webcam was never used in the past models and hence can be considered as an additional modification).
I. Motor Driver
A 16 pin L293D IC can be used to control the set of two motors in either direction. It works on the principle of H bridge circuit which allows the voltage to flow in either direction. This motor driver can be used to control small as well as heavy motors.
Conclusion
The purpose of the proposed system is to make the existing models cost effective and efficient. Out of the various modifications we thought of, we have added a new feature of utilizing an oxygen sensor in this robot. The other modifications that include the calculations of the shortest distance to the body using brute force method was too complex and cost inefficient to be included in this project. This robot can be used in places which are affected by earthquakes and other calamities to help and find the alive human where human intervention is not possible.
References
[1] Ying –Wen Bai , Li-Shi Shen , Zong –Han Li “ Design and implementation of an embedded home surveillance system by use of multiple ultrasonic sensors” , Consumer Electronics , IEEE Transactions , pp 119- 124 ,29 March 2020. [2] Mr. S.P.Vijayaragavan , Hardeep pal Sharma, “Live Human detecting Robot for Earthquake Rescue operation”International Journal of Business Intelligents, volume 2 June 2019. [3] Bahadori, Shahram, Iocchi, Luca, “Human Body Detection in the Robo Cup Rescue Scenario” Department of informatics, Rome Italy. [4] Viral Patel, Asha Gupta, published a paper on the topic “Live Human Detection Robot”, IJIRST- International Journal for Innovative Research in Science & Technology, Volume 1, Issue 6, November [2014]. [5] Purnima G, Asst. Prof. Aravind S, published a paper on the topic “Alive Human Body Detect System Using an Autonomous Pc Controlled Rescue Robot”, International Journal of Emerging Technology and Advanced Engineering, Volume 4, Issue 12, December [2014] [6] Sandeep Bhatia, Ajay Mudgil, and Amita Soni prepare and issue a paper on the topic “Alive Human Detection Using an Autonomous Mobile Rescue Robot\\\", Department of Electrical and Electronics, PEC University of Technology, Chandigarh, India Vol. 02, July [2010] [7] https://www.minelab.com/asia/knowledge-base/getting-started/how-metal-detectors-work [8] https://www.electronicshub.org/ir-sensor/ [9] https://www.processparameters.co.uk/thermocouples-sensor/what-is-a thermocouple/#:~:text=A%20thermocouple%20is%20a%20device,and%20this%20correspo nds%20to%20temperature. [10] https://en.wikipedia.org/wiki/Arduino_Uno [11] https://www.edgefxtech.com/blog/interfacing-hc-05-bluetooth-module-with-microcontroller/ [12] https://medium.com/@ariesiitr/home-automation-and-pir-passive-infrared-sensor- 5f9592863b20\\\\
Copyright
Copyright © 2022 Ujjwal Mishra, Sankalp Mishra, Ananya Shukla. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43682
Publish Date : 2022-06-01
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online