

Ijraset Journal For Research in Applied Science and Engineering Technology
Analysis of Switched Reluctance Motor Performance with Different Slot Pole Combinations
Authors: Akash M. Dharne, Prof. Lata B. Awale
DOI Link: https://doi.org/10.22214/ijraset.2022.44201
Certificate: View Certificate
Abstract
The Switched Reluctance Motors are getting popularity among different applications like electric vehicles and traction due to their simple construction, lower cost and better efficiency. It also have the advantages of low rotor inertia, small size, high pickup, effective and easy cooling etc. Due to its simple structure, switch reluctance motors are mainly used in electric vehicles, vacuum cleaners, washing machines, servo types and variable speed applications. The switch reluctance motor has a rugged structure and is suitable for vibration and high temperature zones. The torque generated by the switch reluctance motor does not depend on the polarity of the phase current. As a result, fewer semiconductor switches are used in power converters. In addition, the losses incurred by SRM motors come only from the stator. Therefore, it can be easily cooled. In this work, the performance of different slot pole combination of SRM is analysed and compared. The Slot poles combinations taken for Analysis are : 6/4, 8/6 and 12/10. The main parameters on which the performance of SRM is compared are Electromagnetic Torque, Torque Ripple and Inductance in Transient Analysis and Output Torque and Power in Steady State Analysis. It is found that with increasing slot pole combination of SRM, the torque ripple decreases and average torque increases.
Introduction
I. INTRODUCTION
Motors are systems that can reduce social effort. Traditional DC motors have lost their importance due to their complex circuitry and maintenance. Induction motors (IMs) make up almost 70% of the machines used in industry. Induction machines have been superseded by traditional DC machines because they have advantages over other machines. Although it has many advantages needed for industrial applications. Disadvantages of induction motors also include low starting torque and large inrush currents. These machines operate at the worst lagging power factor, resulting in increased system i2r loss and reduced system efficiency. Today, special machines or advanced electrical machines are used to meet the needs of multiple devices. The outstanding features of Switch Reluctance Motor (SRM), including all electrical machinery, in conjunction with power electronics enable a wide range of applications in a variety of areas. The switched reluctance motor rugged in construction therefore it can be suitable for vibrating and high temperature zone. The torque produced by the switched reluctance motor is not dependent of phase currents polarity. Therefore the less number of semiconductor switches are used in the power converters. In addition to this the loss occurred in the SRM motor is from the stator only. Hence it can be cooled easily.
II. SWITCHED RELUCTANCE MOTOR
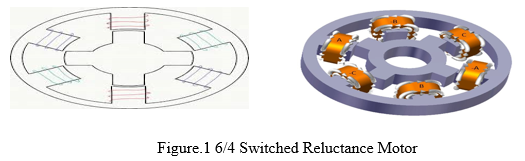
The Figure [1] shows the cross sectional view of a switched reluctance motor. From figure [1] we can see the 6/4 pole arrangement. That is the stator and rotor poles of switched reluctance motor. Three phase supply is given to the 6/4 switched reluctance motor.
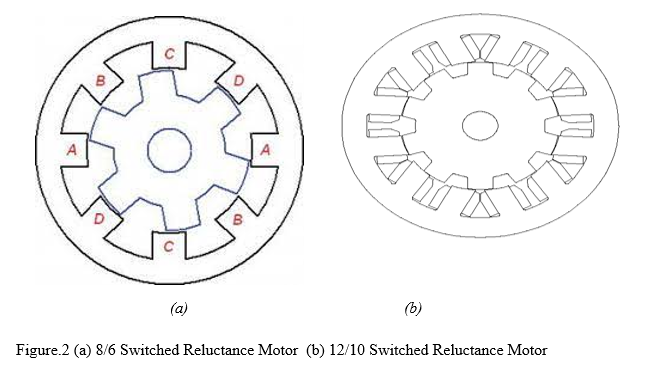
Similarly, Figure [2] (a) and (b) shows the cross sectional view of 8/6 and 12/10 Switched Reluctance Motor.
In general, when compared to other types of electrical machines, the switched reluctance motor is the simplest. In the rotor of a switched reluctance motor, there are no permanent magnets or conductors. The rotor of switched reluctance motor consists of steel lamination stacked on to a shaft. Furthermore, the motor's cost is inexpensive due to its simple mechanical design.
Electrical machines are divided into two groups based on the torque they produce.
As a result, one way of producing torque is through an electromagnet, while the other way is through variable reluctance. The torque produced by a switched reluctance motor is due to variable reluctance. As a result, it is called as switched reluctance motor.
The primary premise of the SRM motor is to produce the least amount of magnetic reluctance possible in order to achieve a stable equilibrium position in the electromagnetic system.
The rotor poles closest to each other are attracted. To produce torque, two diametrically opposing poles are energised at the same moment. When two rotor poles align with the stator pole, however, de-energize occurs.
The adjacent stator pole is now energised, attracting a second set of rotor poles. When the rotor poles and stator poles are aligned in a specific position, this is referred to as the aligned position.
The La reaches its maximum value at this point. As a result, when reluctance reaches its minimum value.
The rotor poles move away from their aligned position as the La value lowers progressively, and the reluctance value achieves its minimal value. The rotor poles shift away from their proper position when the La value lowers. At some point, the rotor poles become completely unaligned with the stator poles. At that point the phase inductance value reaches its minimum value, Lu, while the reluctance value reaches its maximum value.
III. CONDITIONS TO SATISFY FOR COMPARISION OF DIFFERENT SLOT-POLE COMBINATIONS OF SRM
- Rotor diameter of all different slot pole combinations of SRM must be same.
- The ratio of Stator tooth angle to Rotor tooth angle must be same for all different slot pole combinations of SRM.
- Turns per phase of all different slot pole combinations of SRM must be same.
- Input DC Voltage must be same for all different slot pole combinations of SRM.
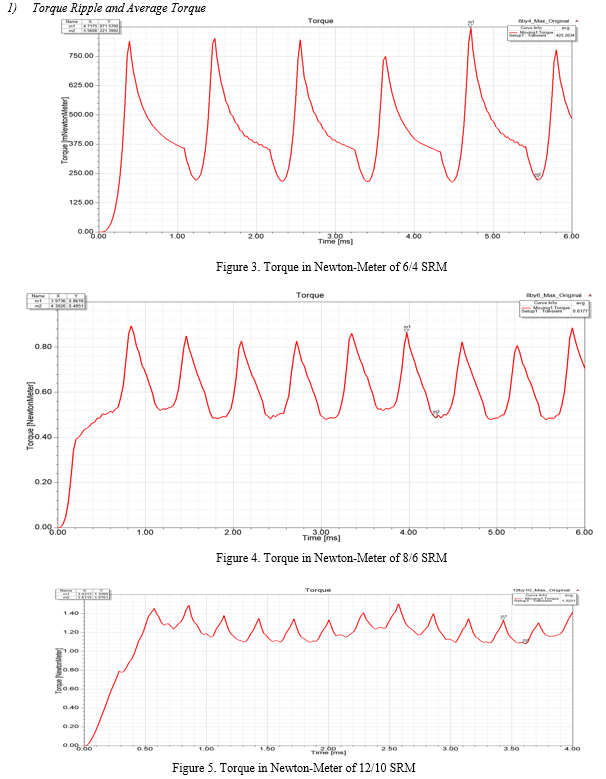
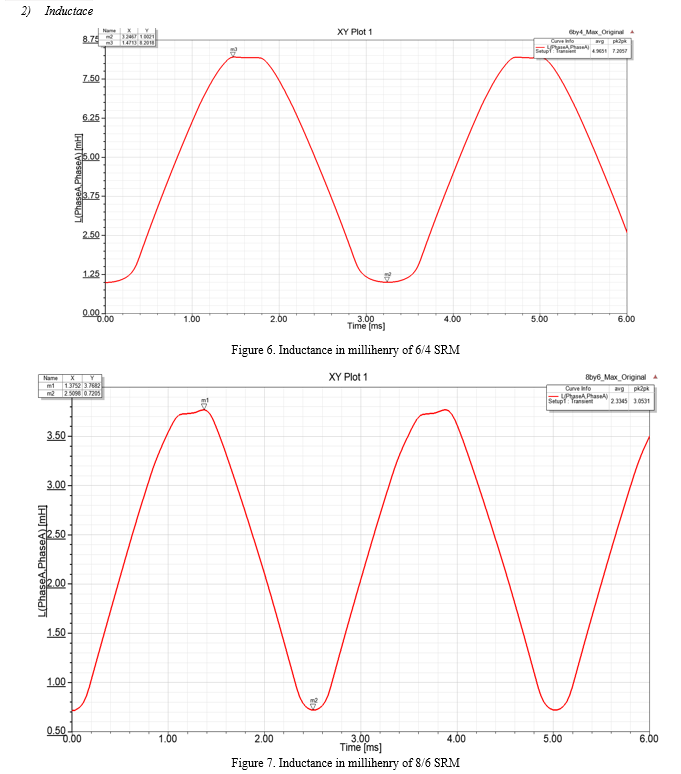
IV. SIMULATION RESULTS
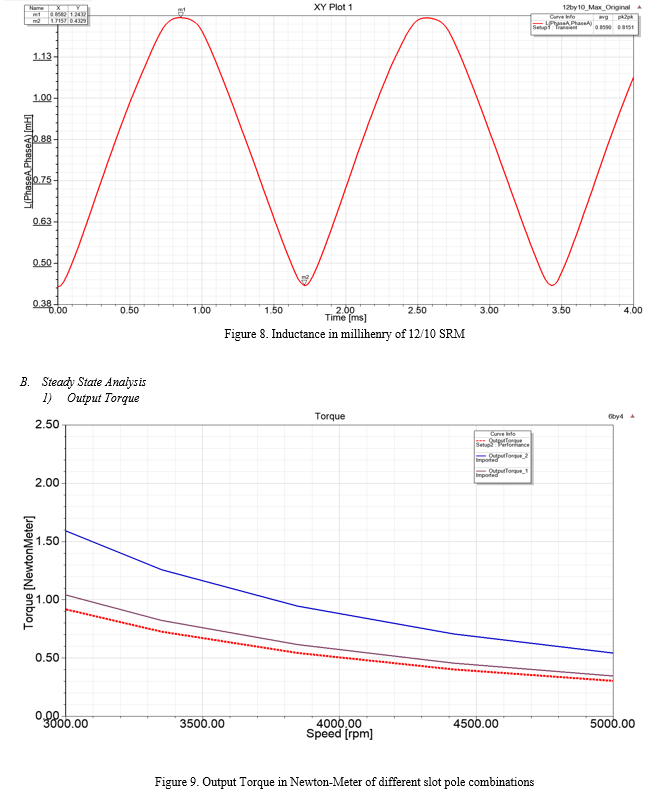
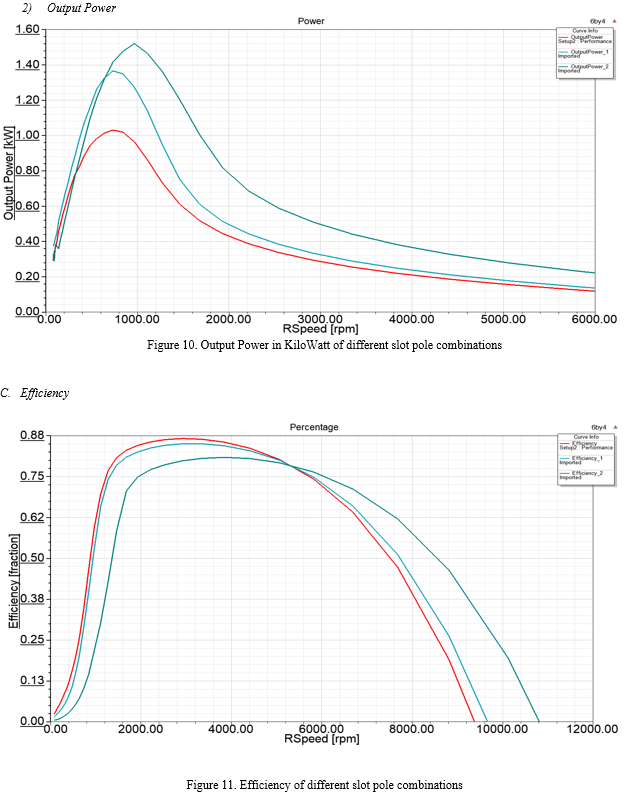
A. Transient Analysis
Conclusion
In this paper, a comparative analysis of SRM with different slot-pole combination is presented. In this comparision the rotor diameter, number of turns per phase and stator to rotor pole tip ratio of each motor is kept constant. It is observed that by increasing the slot pole combinations of SRM, torque ripple decreases and torque ripple is the major problem in SRM. It is also noted that the average inductance value decreases due to less number of conductors as per the slot pole combination increases and average torque of the machine increases with increasing slot-pole combination. The torque is directly proportional to the square of current, therefore the torque of the switched dL Reluctance motor is independent of current direction but it depends on d? Value. If this value is positive then the torque of SRM is also positive. In case if it is negative then torque of the switched reluctance motor is negative. Since the torque is directly proportional to the square of current by putting voltage constant and with decreasing resistance current increases and average torque also increases as per the slot pole combinations increases. In this research paper switched reluctance motor model is designed through Ansys software and also tested successfully by presenting graphs of performance of Switched reluctance motor in Transient and Steady State.
References
[1] R. Krishnan, “Switched Reluctance Motor Drives Modelling”, London, CRC Press, 2001. [2] Fitzgerald, A. E., Kingsley, C., & Umans, S. D. (2014). Electric machinery. McGraw-Hill. [3] Shaik Nayeem Basha, Allamsetti Deepak, Mikkili Ratna Raju &Mrs. K Sri Lakshmi Lavanya, “Simulation of 8/6 Switched Reluctance Motor using ANSYS - MAXWELL 2D”, Compliance Engineering Journal, 2020. [4] Vikramarajan Jambulingam, “Mathematical Modeling and Simulation of Switched Reluctance Motor”, 2016.
Copyright
Copyright © 2022 Akash M. Dharne, Prof. Lata B. Awale. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET44201
Publish Date : 2022-06-13
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online