

Ijraset Journal For Research in Applied Science and Engineering Technology
Android Operated Mobile Robot for Agriculture Purpose
Authors: Kavya A P, Manoj B R, Monish L, Manohara H S
DOI Link: https://doi.org/10.22214/ijraset.2022.44446
Certificate: View Certificate
Abstract
The paper aims on the design and development of robot that is used in the field of agriculture. The robot helps the farmer to perform agriculture activities the robot will perform ploughing, seed sowing, mud levelling, water spraying and cutting the crop. It is mainly designed to minimize the labor of farmers in addition to increasing the speed and accuracy of the work. In this project android application is used to provide the input to the robot. By using Bluetooth, connection establish between the robot and the application. According to the instructions given the robot will perform the operations. In the field of agricultural autonomous vehicle, a concept is been developed to investigate if multiple small autonomous machines could be more efficient than traditional large tractors and human forces.
Introduction
I. INTRODUCTION
Agriculture is the backbone of India. The history of Agriculture in India dates back to Indus Valley Civilization Era and even before that in some parts of Southern India. Today, India ranks second worldwide in farm output. The special vehicles play a major role in various fields such as industrial, medical, military applications etc., The special vehicle field are gradually increasing its productivity in agriculture field. Some of the major problems in the Indian agricultural are rising of input costs, availability of skilled labors, lack of water resources and crop monitoring. To overcome these problems, the automation technologies were used in agriculture. The automation in the agriculture could help farmers to reduce their efforts. The vehicles are being developed for the processes for ploughing, leveling, water spraying. All of these functions have not yet performed using a single vehicle. In this the robots are developed to concentrate in an efficient manner and also it is expected to perform the operations autonomously. The proposed idea implements the vehicle to perform the functions such as ploughing, seed sowing, mud leveling, water spraying. These functions can be integrated into a single vehicle and then performed. The idea of applying robotics technology in agriculture is very new. In agriculture, the opportunities for robot-enhanced productivity are immense - and the robots are appearing on farms in various guises and in increasing numbers. We can expect the robots performing agricultural operations autonomously such as ploughing, seed sowing, mud closing and water spraying. Watching the farms day & night for an effective report, allowing farmers to reduce the environmental impact, increase precision and efficiency, and manage individual plants in novel ways. The applications of instrumental robotics are spreading every day to cover further domains, as the opportunity of replacing human operators provides effective solutions with return on investment. This is especially important when the duties, that need be performed, are potentially harmful for the safety or the health of the workers, or when more conservative issues are granted by robotics.
II. METHODOLOGY
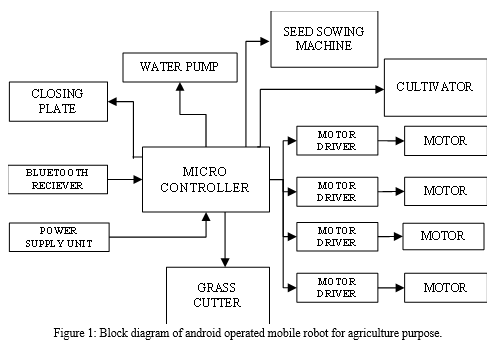
The basic aim of this paper is to develop a multipurpose machine, which is used for digging the soil, seed sowing, and leveler to close the mud and water sprayer to spray water with least changes in accessories with minimum cost. This whole system of the robot works with the battery or adapter power. Microcontroller, Bluetooth, dc motors for the robot movements and geared motors for the cultivator lifting control.
- The base frame is made for the robot with 4 wheels connected and driven the rear wheel is dc motor.
- One end of the frame, cultivator is fitted which is also driven by dc motor and design is made to dig the soil.
- Water pump sprayer to spray the water.
- An DC Motor is used to cut the grass and it is controlled using the toggle switch.
- The whole robot requires the 12v battery or adapter to operate the system.
III. LITERATURE REVIEW
Jayapriya S, G R Anagha, K R Megha, Harshitha B S [1] ‘Automatic Farming Robot for Smart and Effective Cultivation’ for agriculture purpose. The paper aims on the design and development of robot that is used in the field of agriculture. The robot helps the farmer to perform soil levelling, seed sowing, water and pesticide sprinkling, soil levelling and cutting the crop. It is mainly designed to minimize the labor of farmers in addition to increasing the speed and accuracy of the work. They are used an android application to provide the input to the robot. By using Bluetooth, they are establishing a connection between the robot and the application. This whole system of the robot works with the power supply. The base frame of the robot is made with 4 wheels. One end of the frame is fitted by dc motor (DC MOTOR 1,2) and design is used for robot movement. The other end of the frame is fitted by a dc motor (DCMOTOR 3,4) and design is made for levelling and digging. The whole robot requires the 12v battery for operation. Bluetooth receiver is used to control the operation of the vehicle.
B Ranitha, M N Nikhitha, K Aruna, Afreen [2] ‘Solar Powered Autonomous Multipurpose Agricultural Robot Using Bluetooth/Android App’. This work aims to design, develop and design of the robot which can sow the seeds, cut the grass and spray the pesticides, this whole system is powered by solar energy. The designed robot gets energy from solar panel and is operated using Bluetooth/Android App which sends the signals to the robot for required mechanisms and movement of the robot. This increases the efficiency of seed sowing, pesticide spraying and grass cutting and also reduces the problem encountered in manual planting. When the solar panel gets heated it converts sunlight into electricity. This electrical energy is fed into the charging circuit. The charging circuit will work according to maximum power point tracking (MPPT) protocol to generate pulsed voltage and also avoids reverse current. The pulsed voltage is given to battery in order to charge it. The charging of battery is controlled with the help of voltage sensors. Since battery is bidirectional it will charge and supply voltage to Arduino at a time. The voltage supply with sustained oscillation is fed into Arduino with the aid of high pass filter. The channel relay provides voltage supply to all different mechanisms. The motor driver is used to drive the DC motors which run the robot.
Pvr Chaitanya, Dileep Kotte, A. Srinath, K. B. Kalyan [3] ‘Development of Smart Pesticide Spraying Robot’. The disease that causes agents in plants is mainly defined as any agent’s pathogens. This can be done through taking input images using camera, analyzing them using machine learning process. This also displays the exposed area of disease and also predicts the remedies, turn on the pesticide sprayer which sprays the respective pesticide on the exposed area to disease. The movement of robot is done with L293d motor driver and the processor or embedded system is done through Raspberry pi3. We use python code for machine learning which trains the robot with pre-defined images.
Ajesh, Anandhu K, Jelvin Raju, Jerin Saji [4] ‘Bluetooth Controlled Farm Robot’. This project strives to develop a robot capable of performing operations like automatic ploughing, seed dispensing, fruit picking and pesticide spraying. The project presents a low cost, low power and simple system for device control. This system will have high application in farming. For manual control the robot uses the Bluetooth pairing app as control device and helps in the navigation of the robot outside the field. The L298N Motor Driver Module is a high voltage Dual H-Bridge manufactured by ST Company. It is designed to accept standard TTL voltage levels. H-bridge drivers are used to drive inductive loads that requires forward and reverse function with speed control such as DC Motors, and Stepper Motors. It uses the popular L298 motor driver IC and has an on-board 5V regulator which it can supply to an external circuit. It can control up to 4 DC motors, or 2 DC motors with directional and speed control. Motor drivers acts as an interface between the motors and the control circuits. Motor requires high amount of current whereas the controller circuit works on low current signals. So, the function of motor drivers is to take a low-current control signal and then turn it into a higher-current signal that can drive a motor.
Amruta Sulakhe, M.N. Karanjkar [5] ‘Design and Operation of Agriculture Based Pesticide Spraying Robot’. Compared to spraying pesticides manually outdoors, the environment is more closed, and has a high temperature, humidity and so on for operating the spray work in the green-house. In order to protect labourer and reduce labour intensity, we develop a prototype of pesticide spraying robot specially used in the greenhouse. Robot is controlled with a PIC16F877A microcontroller. Designing of the latest inverted ROBOT which can be controlling using an APP for android mobile. We are developing the remote buttons in the android app by which we can control the robot motion with them. And in which we use Bluetooth communication to interface controller and android. Controller can be interfaced to the Bluetooth module though UART protocol. According to commands received from android the robot motion can be controlled.
Dr. Chanda V Reddy, Anudheep R, H M Vishal, Harshitha S, Sai Spoorthi N [6] ‘Agro bot’. This is my final warning. If not submitted I have to reduce marks. agriculture plays an important role in economic status in India. Agriculture - Technology is the process of applying technology in agriculture sector, which improves the efficiency of the crop produced. Compared to traditional methods this process has various advantages in sowing the seeds. Seed sowing robot is regulated and hand-operated. It slashes the exercise of farmers and increases the potential of seed sowing compared to normal planting. In this system we are operating an automated seed sowing robot. It consists of Arduino at mega 328P microcontroller l293ddriver, battery, servomotor, ultrasonic sensor, soil moisture sensor. Robot will sow the seed on the ground until it finds an obstacle. If the obstacle is found it stops and before sowing the seed on the field it usually turns right thus moving forward.
Aruna Devi, Bharathi R [7] ‘Robot Control Using Mobile Phone’. I have not received any update regarding paper. This is my final warning. If not submitted I have to reduce marks. Recently, robot technology has gained popularity because of labor shortage, ability to work for long hours, etc. Conventionally, wireless control robots use RF circuits, which have the drawbacks of limited working range, limited frequency range and limited control. Use of a mobile phone for robotic control can overcome these limitations. It provides the advantages of robust control, working range as large as the coverage area of the service provider.
Y B S Balaji, Shivakumar M C, Sunil S [8] ‘Smart Phone Operated Multipurpose Agricultural Robot’. The paper aims on the design, development and the fabrication of the robot which can dig the soil, leveler to close the mud and sprayer to spray water, these whole systems of the robot work with the battery and the solar power. More than 40% of the population in the world chooses agriculture as the primary occupation, in recent years the development of the autonomous vehicles in the agriculture has experienced increased interest. In agriculture, the opportunities for robot-enhanced productivity are immense – and the robots are appearing on farms in various guises and in increasing numbers. The other problems associated with autonomous farm equipment can probably be overcome with technology.
Gowtham kumar S, Anand G Warrier, Chirag B Shetty, Gerard Elston Shawn D’souza [9] ‘Multipurpose Agricultural Robot’. The paper presents about the multiple agricultural tasks done by the single robot. To develop the efficiency of the agricultural tasks we have to find the new ways. The multipurpose agricultural robot gives an advance method to sow, plow and cut the crops with minimum man power and labor making it an efficient vehicle. The machine will cultivate the farm by considering particular rows and specific column at fixed distance depending on crop.
Dr.Y. SashaRao, V.S.J.C Prasad, Veeresh, Satishkumar, Y Kalyana Krishna [10] ‘Multi-Purpose Agriculture Robot with Android Controller’. The project aims on the development of the robot which can dig the soil, put the seeds, leveler to close the mud and sprayer to spray water, these whole systems of the robot work with the battery and the solar power. More than 40% of the population in the world chooses agriculture as the primary occupation, in recent years the development of the autonomous vehicles in the agriculture has experienced increased interest. In this project, we achieved control both wireless communication between the mobile Robot Android GUI Application. The main task of this project makes a surveillance robot which can be control by emerging android technology. It gives versatile operation of robot controller which need not modify the hardware This system can further be developed by enhancing the performance and by adding more features.
Conclusion
In agriculture, the opportunities for robot-enhanced productivity are immense – and the robots are appearing on farms in various guises and in increasing numbers. The other problem associated with autonomous farm equipment can probably be overcome with technology. This equipment may be in our future, but there are important reasons for thinking that it may not be just replacing the human driver with a computer. It may mean a rethinking of how crop production is done. Robots can improve the quality of our lives but there are downsides. The robot performs the tasks like digging the ground, sowing the seeds and backfilling the soil automatically in a sequence without human intervention. Thus an effort is made so that the robot becomes an aid to the farmers. The design is accepted and unique compared to the existing robots.
References
[1] JayaPriya S, G R Anagha, K R Megha, Harshitha B S. “Automatic Farming Robot for Smart and Effective Cultivation”, International Journal of Advanced Research in Computer and Communication Engineering Vol. 10, Issue 7, July 2021 [2] B Ranitha, M N Nikhitha, K Aruna, Afreen. “Solar Powered Autonomous Multipurpose Agricultural Robot Using Bluetooth/Android App”, Authorized licensed use limited to: SIDDAGANGA INSTITUTE OF TECHNOLOGY. Downloaded on May 15,2020 at 04:07:01 UTC from IEEE Xplor [3] Pvr Chaitanya, Dileep Kotte, A. Srinath, K. B. Kalyan, “Development of Smart Pesticide Spraying Robot”, International Journal of Recent Technology and Engineering (IJRTE) ISSN: 2277-3878, Volume-8 Issue-5, January 2020. [4] Ajesh A1, Anandhu K S2, Jelvin Raju3, Jerin Saji4. “Bluetooth Controlled Farm Robot”, International Research Journal of Engineering and Technology (IRJET), e-ISSN: 2395-0056 Volume: 07 Issue: 04 | April 2020 [5] Amruta Sulakhe, M.N. Karanjkar. “Design and Operation of Agriculture Based Pesticide Spraying Robot”, Shree Tuljabhavani College of Engineering,Tuljapur, Osmanabad, India IJECT Vol. 6, Issue 4, Oct - Dec 2015. [6] Dr.Chanda V Reddy, Anudheep R,H M Vishal, Harshitha S, Sai Spoorthi N. “AGRO BOT” International Advanced Research Journal in Science, Engineering and Technology Vol. 8, Issue 8, August 2021 DOI: 10.17148/IARJSET.2021.8879 [7] Aruna Devi, Bharathi R. “ROBOT CONTROL USING MOBILE PHONE”, Internationa Journals of Electrical and Electronics Engineers Vol.No 7, Issue 02, July – December 2015 [8] B S Balaji, Shivakumar M C, Sunil Y S, “Smart Phone Operated Multipurpose Agricultural Robot”, International Journal of Engineering Research & Technology (IJRTE) ISSN: 2278-0181, Volume-7 Issue-5, May-2018 [9] Gowtham kumar S N1, Anand G Warrier2, Chirag B Shetty3, Gerard Elston Shawn D’souza4. “Multipurpose Agricultural Robot”, International Research Journal of Engineering and Technology (IRJET), e-ISSN: 2395-0056, Volume: 06 Issue: 04 | Apr 2019. [10] Dr.Y.SashaRao, V.S.J.C Prasad, Veeresh, Satishkumar, Y Kalyana Krishna. “Multi-Purpose Agriculture Robot with Android Controller”, International Advanced Research Journal in Science, Engineering and Technology, Vol. 8, Issue 2, February 2021, DOI: 10.17148/IARJSET.2021.8203
Copyright
Copyright © 2022 Kavya A P, Manoj B R, Monish L, Manohara H S . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET44446
Publish Date : 2022-06-17
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online