

Ijraset Journal For Research in Applied Science and Engineering Technology
Arduino Based Congestion Control System for Ambulance
Authors: Ch. Rishitha, M. Bhavana, P. Sriya, Dr. Y. Sreenivasulu
DOI Link: https://doi.org/10.22214/ijraset.2022.43793
Certificate: View Certificate
Abstract
Congestion problem is a fact which contributed large impact on the transport system in the country. because many problems especially when there are emergency cases at traffic light junctions which are always busy with so many vehicles. A congestion control system is designed in order to solve all these problems. This system was designed in such a way that it should be activated when it receives a signal from an ambulance based on radio frequency (RF) transmission and uses a microcontroller to change the sequence back to the normal sequence before the emergency mode is activated. This system will lessen what often happens at the traffic light intersections because other vehicles have to gather together for giving a special route to an emergency vehicle. As a result, this project is successful and the implementation of wireless communication i.e. the radio frequency (RF) transmission in the traffic light control system for emergency vehicles like an ambulance is made possible. The main aim of this project is to design a system that is capable to identify an emergency situation in an ambulance and automatically controls the traffic at the signal. In the future, this system can be improved by controlling real traffic congestion, in fact improving the present traffic light system technology. The existing traffic control system has a lot of limitations because of its fixed time method used. The traffic signal will not alter based on the real-time traffic on road near the junction of two or more roads. Due to this, the traffic congestion cannot be controlled efficiently and the utilization of roads cannot be done to its maximum limit.
Introduction
I. INTRODUCTION
A. Introduction
This project aims in designing a system which is capable of identifying the emergency situation in an ambulance and automatically controls the traffic at the signal point. This helps in decreasing the death rate which occurs mostly due to traffic congestion in emergency situation.
The purpose of this project is to overcome the defaults in the normal traffic controlling system and to design a unique traffic controlling system to enter the KEYS which overcomes the problem of heavy traffic in the popular cities for AMBULANCE.
And main objective of this project is to control the traffic, whenever any time any AMBULANCE is coming in that way by using RF TRANSMITTER section to send the message to that RF receiver. RF receiver will receive the information given to the microcontroller, in that particular way green light will be ON for clearing the traffic and remaining other ways stopped by indicating red light. . The same procedure will be followed by all four sides of the road. The signaling from all the four sides will be taken into consideration.
The Microcontroller is programmed using Embedded C language which provides effective environment in performing the particular task.
The main objectives of the project are:
- Controlling traffic signal indicators so that no traffic congestion occurs for an emergency ambulance.
- Wireless data transmission.
The project provides the following learning:
a. RF Wireless technology.
b. Interfacing RF Module to Microcontroller.
c. Conversion of AC supply to DC supply.
d. Embedded C programming.
e. PCB designing.
B. Project Overview
An embedded system is a combination of both software and hardware to perform a dedicated task. Some of the main devices used as embedded products are Microprocessors and Microcontrollers.
Microprocessors are commonly referred to as general-purpose processors as they simply accept the inputs, process them, and give us the output. In contrast, a microcontroller not only accepts the data as inputs but also manipulates it, interfaces the data with various devices, controls the data, and thus finally gives out the result.
The project “Innovative Congestion Control System for Ambulance” using Arduino microcontroller is an exclusive project which is used to alert through SMS messages modem and also gives Fire alert automatically when fire occurs in the vehicle.
II. EMBEDDED SYSTEMS
A. Embedded Systems
An embedded system is a computer system designed to perform one or more tasks often with real-time computing constraints. It is embedded as part of a complete device often including hardware and some mechanical parts. By contrast, a general-purpose computer, such as a personal computer (PC), is designed to be flexible and to meet a wide range of user needs. Embedded systems control many devices and are in common use today.
Embedded systems are usually controlled by one or more main processing cores that are typically either microcontrollers or digital signal processors (DSP). The key characteristic, however, is being dedicated to handling a particular task, which may require very powerful processors. For example, some air traffic control systems may usefully be viewed as embedded systems, even though they involve mainframe computers and dedicated regional and national networks between airports and radar sites.
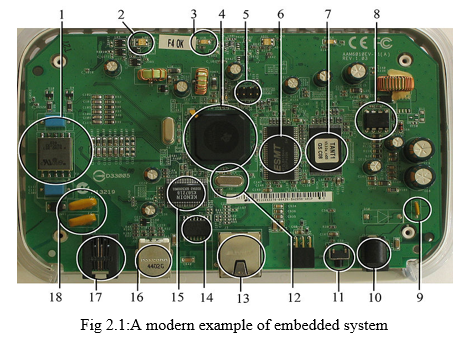
Labeled parts include microprocessor (4), RAM (6), flash memory (7).Embedded systems programming is not like normal PC programming. In many ways, programming for an embedded system is like programming a PC 15 years ago. The hardware for the system is usually chosen to make the device as cheap as possible. Spending an extra dollar a unit in order to make things easier to program can cost millions. Hiring a programmer for an extra month is cheap in comparison. This means the programmer must make do with slow processors and low memory, while at the same time battling a need for efficiency not seen in most PC applications. Below is a list of issues specific to the embedded field.
B. Explanation of Embedded Systems
- Software Architecture
There are several different types of software architecture in common use.
a. Simple Control Loop: In this design, the software simply has a loop. The loop calls subroutines, each of which manages a part of the hardware and software.
b. Interrupt Controlled System: Some embedded systems are predominantly interrupt controlled. This means that tasks performed by the system are triggered by different kinds of events. An interrupt could be generated for example by a timer in a predefined frequency, or by a serial port controller receiving a byte. These kinds of systems are used if event handlers need low latency and the event handlers are short and simple. Usually, these kinds of systems run a simple task in a main loop also, but this task is not very sensitive to unexpected delays. Sometimes the interrupt handler will add longer tasks to a queue structure. Later, after the interrupt handler has finished, these tasks are executed by the main loop. This method brings the system close to a multitasking kernel with discrete processes.
c. Cooperative Multitasking: A non-preemptive multitasking system is very similar to the simple control loop scheme, except that the loop is hidden in an API. The programmer defines a series of tasks, and each task gets its own environment to “run” in. When a task is idle, it calls an idle routine, usually called “pause”, “wait”, “yield”, “nop” (stands for no operation), etc. The advantages and disadvantages are very similar to the control loop, except that adding new software is easier, by simply writing a new task, or adding to the queue-interpreter.
d. Primitive Multitasking: In this type of system, a low-level piece of code switches between tasks or threads based on a timer (connected to an interrupt). This is the level at which the system is generally considered to have an "operating system" kernel. Depending on how much functionality is required, it introduces more or less of the complexities of managing multiple tasks running conceptually in parallel. As any code can potentially damage the data of another task (except in larger systems using an MMU) programs must be carefully designed and tested, and access to shared data must be controlled by some synchronization strategy, such as message queues, semaphores, or a non-blocking synchronization scheme. Because of these complexities, it is common for organizations to buy a real-time operating system, allowing the application programmers to concentrate on device functionality rather than operating system services, at least for large systems; smaller systems often cannot afford the overhead associated with a generic real-time system, due to limitations regarding memory size, performance, and/or battery life.
e. Microkernels And Exokernels: A microkernel is a logical step up from a real-time OS. The usual arrangement is that the operating system kernel allocates memory and switches the CPU to different threads of execution. User-mode processes implement major functions such as file systems, network interfaces, etc. In general, microkernels succeed when the task switching and intertask communication are fast, and fail when they are slow. Exokernels communicate efficiently by normal subroutine calls. The hardware and all the software in the system are available too, and extensible by application programmers.
III. HARDWARE DESCRIPTION
A. Introduction
In this chapter, the block diagram of the project and the design aspect of independent modules are considered. The Block diagram is shown in fig: 3.1:
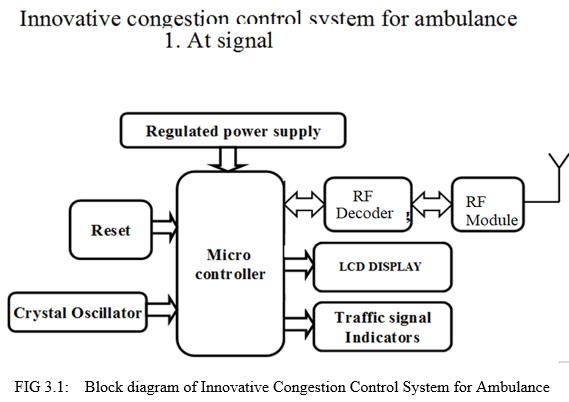
The main building blocks of the project are
- Regulated Power Supply.
- Microcontroller.
- Traffic signal indicators.
- Control buttons
- RF modules.
- Crystal oscillator.
- Reset.
- Arduino Microcontroller
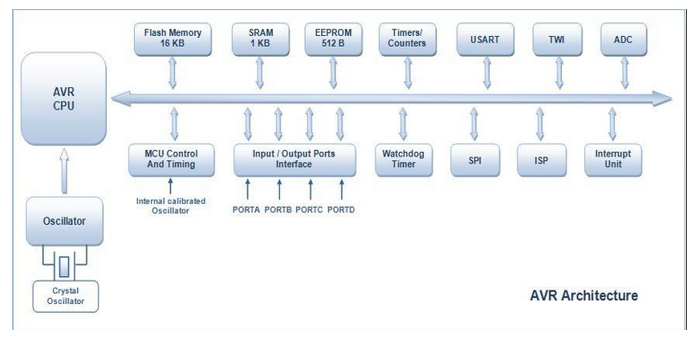
2. Microcontroller: Microcontroller can be termed as a single on-chip computer that includes a number of peripherals like RAM, EEPROM, Timers, etc., required to perform some predefined task. Atmel's AVRs have a two-stage, single-level pipeline design. This means the next machine instruction is fetched as the current one is executing. Most instructions take just one or two clock cycles, making AVRs relatively fast among eight-bit microcontrollers. The AVR processors were designed with the efficient execution of compiled C code in mind and have several built-in pointers for the task.
3. AVR microcontrollers are available in three categories:
a. TinyAVR – Less memory, small size, suitable only for simpler applications
b. MegaAVR – These are the most popular ones having a good amount of memory (up to 256 KB), a higher number of inbuilt peripherals, and are suitable for moderate to complex applications.
c. XmegaAVR – Used commercially for complex applications, which require large program memory and high speed.
4. Applications: AVR microcontroller perfectly fits many uses, from automotive industries and controlling home appliances to industrial instruments, remote sensors, electrical door locks, and safety devices. It is also ideal for smart cards as well as for battery-supplied devices because of its low consumption. EEPROM memory makes it easier to apply microcontrollers to devices where permanent storage of various parameters is needed (codes for transmitters, motor speed, receiver frequencies, etc.). Low cost, low consumption, easy handling, and flexibility make ATmega8 applicable even in areas where microcontrollers had not previously been considered (example: timer functions, interface replacement in larger systems, coprocessor applications, etc.). In System Programmability of this chip (along with using only two pins in data transfer) makes possible the flexibility of a product, after assembling and testing have been completed. This capability can be used to create assembly-line production, to store calibration data available only after final testing, or it can be used to improve programs on finished products
5. Crystal Oscillator: The crystal oscillator speed that can be connected to the Arduino microcontroller range from DC to 16Mhz. Using the CCS C compiler normally 20Mhz oscillator will be used and the price is very cheap. The 20 MHz crystal oscillator should be connected with about a 22pF capacitor. Please refer to my circuit schematic. A crystal oscillator is an electronic circuit that uses the mechanical resonance of a vibrating crystal of piezoelectric material to create an electrical signal with a very precise frequency. This frequency is commonly used to keep track of time (as in quartz wristwatches), provide a stable clock signal for digital integrated circuits, and stabilize frequencies for radio transmitters and receivers. The most common type of piezoelectric resonator used is the quartz crystal, so oscillator circuits designed around them were called "crystal oscillators".
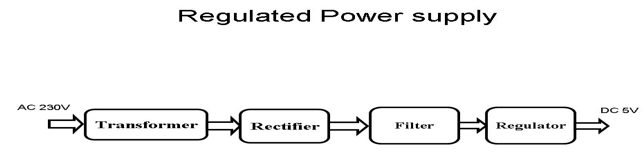
B. Regulated Power Supply
The term is most commonly applied to electrical energy supplies, less often to mechanical ones, and rarely to others. A power supply may include a power distribution system as well as primary or secondary sources of energy such as
C. LED
A light-emitting diode (LED) is a semiconductor light source. LEDs are used as indicator lamps in many devices and are increasingly used for lighting. Introduced as a practical electronic component in 1962, early LED’s emitted low-intensity red light, but modern versions are available across the visible, ultraviolet, and infrared wavelengths, with very high brightness.
Applications of LED fall into three major categories:
- Visual signal application where the light goes more or less directly from the LED to the human eye, to convey a message or meaning.
- Illumination where the LED light is reflected from objects to give a visual response to these objects.
- Generate light for measuring and interacting with processes that do not involve the human visual system.
d. RF Transmitter and RF Receiver
- RF Transmitter
General Description
WL102-341 transmitter module is UHF ASK modulated transmitters, support ASK and OOK modulation. The transmitter module integrates an analog PLL circuit and ASK modulation ciruit, with a high level of integration, etc., can be applied with a short-range wireless communications. Operating frequency 433MHz, transmit power is greater than 11dBm.
communications. Operating frequency 433MHz, transmit power is greater than 11dBm.
Product Features:
1. Support ASK / OOK modulation, transmit power is greater than 10dBm;
2. Operating frequency: 433.923 MHz;
3. Mains input voltage range: 2V-3.6V;
4. Low-power consumption shutdown mode current is less than 1uA;
5. Transfer rate up to 20.1KHz;
6. Launch distance:20-101 meters
7. Size: 16* 12 * 1.1mm
8. External antenna: 25cm ordinary multi-core or single-core line
9. Temperature range: -46-85 °C
2. RF Receiver
General Description
RX470-4: Superheterodyne wireless receiver module is receiving UHF ASK demodulators support ASK and OOK modulation. The receiver module has high sensitivity (-108.1dBm), Low-power performance, along with high dynamic range (greater than 59dB). The module uses a highly integrated chip, built front-end low-noise amplifier, Mixers, filters, frequency synthesizer circuit, etc., which can maximize the signal optimization.
Product Features
1. Support ASK / OOK modulation, the receiver sensitivity of -108.1dBm;
2. Operating frequency: 433.923MHz, the bandwidth of about ± 151KHz;
3. Mains input voltage range: 2.23V-5V;
Working current: Type : 2.12mA (Requirement : VDD=5V) ; Type :2.12mA (Requirement : VDD=3V)
4. Quiescent Current: 1.1uA
5. Low power consumption;
6. Good selectivity and spurious radiation suppression, and easy to pass CE / Fcc international certification;
7. Good local oscillator radiation suppression, multiple receiver modules to work with (ie, more than single income) and will not interfere with each other, used together without affecting the receiving distance;
8. Multiple transmission rates, the general module for 2KHz, up to 10KHz;
9. Temperature range: -40-84 °C
10. Ultra-small size of 30 × 9 × 1 (mm) (can be customized according to customer)
IV. PROJECT DESCRIPTION
In this chapter, the schematic diagram and interfacing of the Arduino microcontroller with each module are considered.
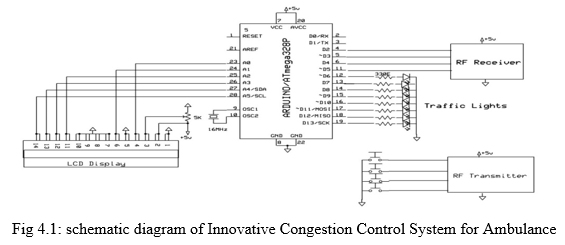
The above schematic diagram of the Innovative Congestion Control System for Ambulance explains the interfacing section of each component with a microcontroller, Bluetooth module, and relay. The crystal oscillator is connected to the 13th and 14th pins of the microcontroller and the regulated power supply are also connected to the microcontroller LEDs are also connected to the microcontroller through resistors and a motor driver is connected to the microcontroller.
V. SOFTWARE DESCRIPTION
This project is implemented using the following different software:
- Express PCB – for designing circuit
- Arduino C compiler - for compilation part
A. Express PCB
Breadboards are great for prototyping equipment as it allows greater flexibility to modify a design when needed; however the final product of a project, ideally should have a PCB, few cables, and to survive a shake test. Not only is a proper PCB neater but it is also more durable as there are no cables that can yank loose.
Express PCB is a software tool used to design PCBs specifically manufactured by the company Express PCB (no other PCB maker accepts Express PCB files). It is very easy to use, but it does have several limitations.
It can be used as more of a toy than a professional CAD program.
It has a poor part library (which we can work around)
It cannot import or export files in different formats
It cannot be used to make boards for DIY production
B. Preparing Express PCB for First Use
Express PCB comes with a less exciting list of parts. So before any project is started head over to Audio logic and grab the additional parts by morsel, ppl, and tangent, and extract them into your Express PCB directory. At this point start the program and get ready to set up the workspace to suit your style.
Click View -> Options. In this menu, set up the units for “mm” or “in” depending on how you think, and click “see through the top copper layer” at the bottom. The standard color scheme of red and green is generally used but it is not as pleasing as red and blue.
VI. ADVANTAGES AND DISADVANTAGES
A. Advantages
RF-based user-friendly interfacing.
- Low power consumption.
- Controls high and low voltage devices.
- Long life.
- 433MHz wireless transmission.
- Fast response.
- Efficient and low-cost design.
- Low power consumption.
B. Disadvantages
- Status and feedback of devices are not obtained.
- Limited distance.
C. Applications
- It can be used in places where humans cannot work.
- Mainly in military applications, robots play a vital role in the detection of explosives.
- Can be used to control devices.
VII. RESULTS
A. Result
The project “Innovative Congestion Control System for Ambulance” was designed such that the Traffic Lights can be switched ON/OFF using an RF transmitter by Ambulance Driver.
B. Conclusion
Integrating features of all the hardware components used have been developed in it. The presence of every module has been reasoned out and placed carefully, thus contributing to the best working of the unit. Secondly, using highly advanced ICs with the help of growing technology, the project has been successfully implemented. Thus the project has been successfully designed and tested.
C. Future Scope
Our project “Innovative Congestion Control System for Ambulance” is mainly intended to control devices using WiFi/Smart Phone through a Bluetooth module.
The controlling device of the whole system is a Microcontroller. Bluetooth modules and relays are interfaced with the Microcontroller. Relays are fed as input to the Microcontroller. The Microcontroller processes this data and transmits it over Bluetooth, which will be received from the PC. In achieving the task the controller is loaded with a program written using Embedded ‘C’ language.
The controlling device for the automation in the project is a Microcontroller. The data sent from the PC over Bluetooth will be received by the Bluetooth module connected to Microcontroller. The microcontroller reads the data and decides the switching action of electrical devices connected to it through Relay and Triac switches. The Microcontroller is programmed using embedded ‘C’ language.
By connecting temperature, gas, and sensors to the system we can get the temperature of dangerous zones in the personal computer itself instead of sending humans there and facing problems in a field. The project can be extended by using the robot there and the sensor will detect the temperature it gives information to the microcontroller and the microcontroller gives the information to the transceiver from that we can get the data at pc side. By connecting the smoke sensor to the robot we can get the information related concentration of smoke or gases in the respective field i.e. (coal mines, dangerous zones, etc). Sensors sense the information and it gives to the microcontroller and it gives to the transceiver and from that, we get the information in a personal computer.
References
The sites which were used while doing this project: [1] www.wikipedia.com [2] www.allaboutcircuits.com [3] www.microchip.com [4] www.howstuffworks.com
Copyright
Copyright © 2022 Ch. Rishitha, M. Bhavana, P. Sriya, Dr. Y. Sreenivasulu. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43793
Publish Date : 2022-06-03
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online