

Ijraset Journal For Research in Applied Science and Engineering Technology
Review Paper on Arduino Based Fire Fighting Robot
Authors: Anam Sheikh, Gopal Purohit, Vaishnavi. C. Raut, Rehan Rashid Abdul, Prof. C. H. Kidile
DOI Link: https://doi.org/10.22214/ijraset.2022.43215
Certificate: View Certificate
Abstract
A fire outbreak is a hazardous act that leads to numerous consequences. Detecting a fire at an early stage and extinguishing it can aid in prevention of various accident. Till now we rely on human resource. This often leads to risking the life of that person . Therefore, fire security becomes an important aspect to save human lives. In this paper a fire extinguishing robot has been proposed and designed which detects the fire location and extinguish fire by using sprinkler on triggering the pump. This robot uses three flame sensors for accurate fire detection. This proposed model of Fire Extinguishing Robot using Arduino used to detect presence of fire and extinguishing it automatically without any human interference. It contains gear motors and motor driver to control the movement of robot when it detects any presence of fire and will automatically start the water pump to extinguish that fire breakout. This model robot has a water ejector which is capable of ejecting water at the fire breakout place. The water ejector pipe can be move towards the required direction using servo motor .The whole operation is controlled by an Arduino UNO micro controller.
Introduction
I. INTRODUCTION
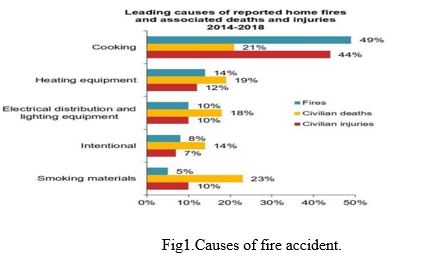
One of the most important parameter in fire disaster is life, i.e. lives lost in saving someone else life. It is sometimes impossible for fire-fighters personnel to access the site of a fire because of explosive materials, smoke, and high temperatures. A fast response to detect the fire can avoid many disastrous things. From the given statics (Fig.1), it is observed that fire can take place at domestic as well as at industrial level. A normal spark can generate a massive fire breakout.Not only lives of industrial people but also the lives of domestics people is at risk because of poor fire management system. Fire can take many lives to and can injure many people for their life time. But it can be avoided using proper fire controlling methods. For such environments, fire-fighting robot is proposed. In today’s generation a lot of robots are proposed and designed to remove the human factor from dangerous and deadly work. The use of robots is becoming very common that safely completes the labour intensive or deadly work for human beings. A Fire Extinguishing Robot is based on IOT Technology. In Fire Extinguishing robot, we intend to build a system that could extinguish a small flame by sensing and moving to the location itself.It will automatically detect the fire with the help of flame sensors. Once it detects the fire breakout location, it navigates itself accordingly to reach the fire source and extinguishes the fire by using built-in fire extinguishing system. For fire detection it is using three flame sensors. First one for the left direction, second one for the forward direction and third one for the right direction. Fire extinguishing system will get activated when fire detection system detects fire. It then reaches the breakout point and water pump will start ejecting the water when it detects fire. The key features of this system is to provide surveillance of fire so that major fire accidents can be prevented and loss of human lives gets minimized.
II. PROBLEM FORMULATION
Fire disaster is one of the dangerous problems that can lead to heavy loss both financially and by taking lives. Sometime it becomes difficult for fighters to access the site of a fire because of explosive materials, smoke, and high temperatures. Such situations risk the lives of fire fighters too. In such environments, fire-fighting robots can be useful. This Fire Extinguishing Robot is based on IOT Technology. In Fire Extinguishing Robot, we intend to build a system that could extinguish a small flame by sensing and moving to the location itself.Sometime delay in the arrival of fire fighters leads to numerous consequences.The Fire Extinguishing robot continuously monitors the environment and extinguishes it without delay.
III. LITERATURE SURVEY
Tawfiqur Rakib, M. A. Rashid Sarkar proposed a fire fighting robot model which consists of a base platform made up of ‘Kerosene wood’, LM35 sensor for temperature detection, flame sensors to detect the fire and a water container of 1 litre capacity which is made up of a strong cardboard that makes it water resistant. The robot has two wheels for its movement. [1]
Saravanan P. ,Soni Ishawarya proposed a model which uses Atmega2560 micro-controller and in which the robot is divided into three basic units according to their functions which are as locomotive unit, fire detecting unit and extinguishing unit.Each unit performs their task in order to achieve the desired output of extinguishing fire.The locomotive unit is used for the movement of the robot and to avoid the obstacles with the help of four IR and four ultrasonic sensors.The fire detecting unit is used to detect fire using LDR and temperature sensor. The extinguishing unit is used to extinguish the fire using water container and BLDC motor.The robot also have a bluetooth module that is connected with the smartphones in order to navigate it in the proper direction. [2]
S. Jakthi Priyanka,R. Sangeetha proposed an android controlled fire fighting robot which uses Arduino UNO R3. The robot consists of gas sensor for fire detection, gear motor and motor drive for the movement of robot, a bluetooth module to connect the robot with the android device and to control the robot with the smartphone as well. Water pump and sprinkler is also used in this. To instruct the Arduino UNO an open source software which is Arduino IDE is required to code and to implement that code in Arduino UNO. [3]
Nagesh MS, Deepika T V , Stafford Michahial, Dr M Shivakumar proposed a fire extinguishing robot which employs DTMF (Dual Tone Multi Frequency Tones) technology for the navigation of the robot and uses a flame sensor for fire detection that is capable of sensing flame of the wavelength range 760 to 1100 nm and sensitivity varies from 10cm to 1.5feet. [4]
Sushrut Khajuria, Rakesh Johar, Varenyam Sharma, Abhideep Bhatti proposed an arduino based fire fighter robot which consists of RF based remote operation to operate the robot and water pump.The robot is controlled by the user within a range of 7 metres.It also consists of a wireless camera which helps user to move the robot in the required direction.[5]
Khaled Sailan, Prof. Dr.-Ing. Klaus-Dieter Kuhnert, Simon Hardt proposed an obstacle avoidance robot named as Amphibious Autonomous Vehicle. In this robot, a fuzzy controller is used to avoid static obstacle in real time.It aims to guide the robot or vehicle along its path avoiding all the obstacle that comes along the path.[6]
J Jalani1 , D Misman1 , A S Sadun1 and L C Hong1 proposed a automatic fire fighting robot with notification.This robot consists of three flame sensors for fire detection in left,right and centre direction.It also consists of three ultrasonic sensors for obstacle detection and avoidance.When the robot detects fire it also sends a warning notification to the user using bluetooth module.[7]
IV. METHODOLOGY
The theme of this paper is to automatically sense the environmental fire and extinguish it without human intervention. The methodology is divided into three parts. The first part is on the design structure, followed by hardware description and the finally on the programming design. All these three parts were assembled together and experiments were then performed to build a system that can extinguish the fire that was carried out
A. Design Structure
In this section, the prototype of robotic system is presented, in which it consists of IR flame sensors, servo motors, submersible water pump, motor driver, mini breadboard, BO motors, rubber wheels, processor, and communication module for exchanging data between the fire-fighting robot and Arduino software. Fig 2 shows the basic prototype of our firefighting robot. The robot carries four main functions: First, it initializes itself i.e. its sensors gets initializes as the power is supplied. Second, robot sense the surrounding environment (for instance for the level of temperature) and identify the fireplace. Third, robot sends the navigating information and starts to navigate itself towards the fireplace. Fourth, finally the robot starts to extinguish the fire with the help of servo motors and submersible water pump.

B. Hardware Implementation
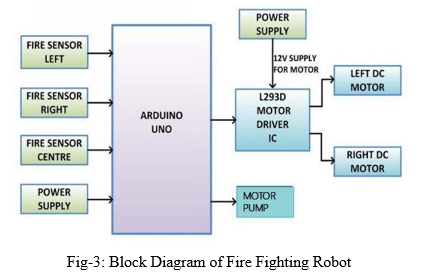
The hardware part is one of the crucial parts in the development of firefighting robot. It includes Arduino UNO, IR flame sensors, servo motors, submersible water pump, motor driver, mini breadboard, BO motors, and rubber wheels. Fig 3 shows the block diagram of firefighting robot which consists of three IR flame sensors as the input of the system. Arduino UNO is used as a micro-controller that connects other components. L293D Motor driver is used to drive motors and is capable of running two DC motors (Left DC motor and Right DC motor) at the same time.
C. Hardware Used
- ATmega328P IC(Arduino UNO)

Fig 4. shows the Arduino UNO board. It is basically a micro-controller kit that is used to get data from peripheral devices (sensors, motors, etc.). The Arduino UNO Micro-controller board is based on the ATmega328P IC. The ATmega328P is good platform for robotics application which makes robot to extinguish fire in real time. Arduino UNO board consist the sets of digital and analog pins that may act as an interface to various expansion boards and other circuits. It contains everything needed to support the microcontroller.
2. IR Flame Sensor: Fig. shows the IR Flame Sensor. The IR flame sensor senses the environment and detects the presence of fire or flame. The module is based on the IR receiver and basically detects the presence of flammable and harmful gases like nitrogen ,hydeogen, carbon mono oxide. The signal detection capacity is adjustable. The robot contains three flame sensors.

3. L293D Motor Driver: Fig.shows the L293D Motor Driver.L293D is a motor driver or motor driver IC which is responsible for the movement of DC motor on either direction.L293D is a 16 pin IC through which we are able to run two DC motors simultaneously in any direction.

4. Servo Motors: Fig.shows the Servo Motors.Servo Motors are electronic devices that are mainly used for providing specific velocity and acceleration.

5. Submersible Water Pump: Fig. shows the submersible water pump. Submersible Water Pump is ideal for making automatic watering system using Arduino. The water pump is an important part of the robot as it will pump water to extinguish the fire.

6. BO Motors: Fig.shows the BO motor.BO Motor is a dual shaft motor having 300 rpm .It converts electrical energy into mechanical energy .It is the replacement to our metal gear DC motors .Our robot uses four dual shaft motors.

D. Programming
For programming ,the Arduino software provides an integrated development environment (Arduino IDE) and core libraries.The Arduino IDE program is a software program written in Java language and based on the Processing .The Arduino IDE is basically a framework built on top of C and C++ and compiled using avr-gcc and AVR Libc.The open source Arduino IDE makes it easy to write code and upload it to the Arduino Uno for execution.It is available for all major desktop platform i.e.,Windows,Mac OS X,and Linux .Fig.10.shows the Arduino IDE program.
V. RESULT DISCUSSION
Fire Fighting Robot has developed to reduce human life lost and to develop such a device that automatically sense fire and extinguish it without human intervention.In this the fireplace is detected using IR flame sensors and are connected to Arduino UNO , which control the movement of Motor drive that helps the robot to reach the fireplace and extinguishes it with the pumping mechanisms In the industry if any fire accident occurs,there is a need of person to monitor continuously and rectify it.In this process if any time delay takes place irreparable loss occurs in industry. The firefighting robot continuously monitors the surrounding and helps in extinguishing the fire .Fig.11 shows the overall prototype of fire fighting robot.
VI. ACKNOWLEDGEMENT
We as the authors would like to extend a special thanks of vote to the Prof.C.H.Kidile, our guide for their valuable guidance and suggestions to improve this paper without which it would have been a very difficult task.. The paper is supported by Jagdambha Institute of Engineering and Technology,Yavatmal.
Conclusion
This model of Fire Extinguishing Robot aids to share out the burden of fire fighters in firefighting task. Our project aims to build a real time firefighting robot which moves in a constant speed, identify the fire and then extinguish it with the help of pumping mechanism. The detection and extinguishing was done with the help basic hardware components attached with the robot. Firstly, IR Flame sensors are used for the detection of fire. Secondly, BO Motors and Rubber wheels are used to navigate the robot to reach the fireplace. Finally, the robot extinguishes the fire with the help of submersible water pump and servo motors.
References
[1] Tawfiqur Rakib, M. A. Rashid Sarkar, “Design and fabrication of an autonomous firefighting robot with multi sensor fire detection using PID controller”, ICIEV Volumn 23 issue-1 JUNE 2016. [2] Saravanan P. ,Soni Ishawarya, “Android controlled intergrated semi-autonomous firefighting robot”, Ineternational journal of innovative science Engg. and Technology 2015. [3] S. Jakthi Priyanka,R. Sangeetha, “Android controlled firefighting robot”,Ineternational journal of innovative science Engg. and Technology ,Volumn 3, 2017. [4] Nagesh MS, Deepika T V , Stafford Michahial, Dr M Shivakumar, “Fire Extinguishing Robot”, International Journal of Advanced Research in Computer and Communication Engineering,Vol. 5, Issue 12, December 2016 [5] Sushrut Khajuria, Rakesh Johar, Varenyam Sharma, Abhideep Bhatti, “ Arduino Based Fire Fighter Robot”,International Journal of Scientific Engineering and Research (IJSER),Volume 5 Issue 5, May 2017 [6] Khaled Sailan, Prof. Dr. Ing. Klaus- Dieter Kuhnert “Obstacle avoidance stratergy using fuzzy logic steering control of amphibious autonomous vehicle”, International journal of innovative science Engg. and Technology ,Volumn 2, 2015 [7] J Jalani1 , D Misman1 , A S Sadun1 and L C Hong1,“Automatic fire fighting robot with notification”,IOP Conference Series: Materials Science and Engineering, Volume 637, The 3rd International Conference on Robotics and Mechantronics (ICRoM 2019) 9–11 August 2019, Sabah, Malaysia
Copyright
Copyright © 2022 Anam Sheikh, Gopal Purohit, Vaishnavi. C. Raut, Rehan Rashid Abdul, Prof. C. H. Kidile . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43215
Publish Date : 2022-05-24
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online