

Ijraset Journal For Research in Applied Science and Engineering Technology
Arduino based Smart Electric Vehicle
Authors: Md. Khadeer Khan, A. Vivek, K. Jithendhar, V. Suresh Kumar
DOI Link: https://doi.org/10.22214/ijraset.2023.52433
Certificate: View Certificate
Abstract
The field of robotics is witnessing rapid advancements, leading to their widespread integration in modern technology. The growing popularity of robots across various applications can be attributed to their efficiency and accuracy in performing tasks. This research proposes the development of a Smart Electric Vehicle (SEV) using Arduino technology. The SEV incorporates advanced functionalities, including automatic obstacle avoidance and voice command control. Powered by batteries, it integrates key components such as a PIR sensor, Ultrasonic sensor, L298N motor driver module, and HC-05 Bluetooth module. The human detection system utilizes the PIR sensor to detect human presence, triggering an alarm to alert the driver. Real-time obstacle avoidance is achieved through ultrasonic sensors that adjust the vehicle\'s direction to prevent collisions. The SEV further demonstrates the application of voice-controlled robotics, enabling effortless command of its movements. Control of the SEV is facilitated through an Android app, which communicates with the Arduino UNO microcontroller via the UART protocol, granting comprehensive control over its movements. This research highlights the potential of SEVs in revolutionizing transportation and logistics, offering a sustainable and eco-friendly solution while ensuring intelligence and safety. By leveraging advanced features and technologies, the Arduino-based SEV showcases the possibilities of integrating robotics into the transportation sector.
Introduction
I. INTRODUCTION
The research project entitled "Arduino based Smart Electric Vehicle" is an innovative approach towards achieving a sustainable transportation system. It aims to address the need for a highly functional and intelligent electric vehicle with advanced features and capabilities. With the increasing demand for sustainable transportation solutions, the development of such a vehicle holds great significance in the current era of technological advancements. The main aim of the research is to develop a smart electric vehicle that can be controlled using voice commands, detect humans in its path, and avoid obstacles, thereby providing a safer and more convenient mode of transportation. The proposed project makes use of Arduino Uno, a powerful microcontroller, to control the various components of the electric vehicle. The vehicle is equipped with a PIR Sensor that is used to detect living beings in its path. The vehicle is also equipped with ultrasonic sensor that is used to detect obstacles in its path. The sensor emits ultrasonic waves, which bounce back when they hit an obstacle. The time taken for the waves to bounce back is used to calculate the distance between the vehicle and the obstacle. If the distance is less than a certain threshold, the vehicle stops to avoid a collision. One of the key features of the project is voice control. The vehicle can be controlled using voice commands, which are processed using a speech recognition module. The module converts the voice commands into electrical signals, which are then interpreted by the microcontroller. The vehicle can be controlled using commands such as "move forward," "turn left," "turn right," and "stop." The project also makes use of a Bluetooth module, which enables the vehicle to be controlled using a smartphone app. The app, Arduino Voice Control, can be used to control the vehicle's movements, monitor its battery level, and view its surroundings through the camera.
The problem statement for the research, "Arduino based Smart Electric Vehicle," is the need for an efficient, safe, and eco-friendly mode of transportation that is affordable and accessible to all. The current transportation system is heavily reliant on fossil fuels, which not only harm the environment but also lead to rising costs and energy insecurity. In addition, traditional vehicles are often designed for individual use, leading to traffic congestion and inefficient use of resources. To address these challenges, the project aims to develop a smart electric vehicle that utilizes the latest technology to provide a safe, convenient, and eco-friendly transportation option. The vehicle will be powered by a rechargeable battery and equipped with features such as voice control, human detection, obstacle avoidance, and remote monitoring to enhance safety and usability. The project seeks to demonstrate that electric vehicles can be reliable, affordable, and accessible to a wide range of users, thereby helping to reduce greenhouse gas emissions and promote sustainable development.
The project "Arduino based Smart Electric Vehicle" offers several advantages over traditional electric vehicles, making it a significant step towards achieving a sustainable transportation system. One key advantage is the incorporation of voice control, which greatly enhances the ease of controlling the vehicle, particularly for individuals with disabilities. The ability to command the vehicle through voice commands eliminates the need for manual input, providing a convenient and intuitive control interface. Furthermore, the project integrates human detection and obstacle avoidance features, significantly enhancing the safety of the vehicle. The human detection system, utilizing a PIR sensor, enables the vehicle to detect the presence of humans and trigger an alarm to alert the driver. This feature helps to mitigate the risk of accidents by ensuring the driver remains aware of nearby individuals.
Moreover, the obstacle avoidance system, employing ultrasonic sensors, allows the vehicle to detect obstacles in real-time. By automatically adjusting the vehicle's direction, the system ensures collision avoidance, further reducing the likelihood of accidents. The inclusion of a Bluetooth module enables remote control of the vehicle, making it easier to manoeuvre and park in tight spaces. The ability to control the vehicle wirelessly adds convenience and flexibility to the user, providing an additional layer of functionality.
In conclusion, the "Arduino based Smart Electric Vehicle" project showcases the potential of advanced technologies such as microcontrollers and speech recognition in the development of safer and more convenient modes of transportation. By integrating voice control, human detection, obstacle avoidance, and remote-control capabilities, the project offers significant advantages over traditional electric vehicles. It contributes to the advancement of sustainable transportation systems by prioritizing safety, convenience, and user-friendly interfaces.
II. OBJECTIVES
The main objectives of the "Arduino Based Smart Electric Vehicle" project are as follows:
- To design and develop a prototype of an automatic obstacle avoidance electric vehicle that is capable of detecting and avoiding obstacles in real-time.
- To implement a voice control mechanism using an android app that enables the user to control the vehicle's movements remotely.
- To integrate various sensors, including PIR and ultrasonic sensors, to provide accurate obstacle detection and avoidance capabilities to the vehicle.
- To use the Arduino UNO microcontroller to control the motor driver module and the Bluetooth module for wireless communication, providing the user with total control of the vehicle's movements.
- To ensure that the vehicle is powered by an efficient and reliable battery system, capable of providing enough power to the vehicle's motors for extended periods of operation.
- To test the prototype in real-world scenarios and evaluate its performance, including its speed, accuracy, and overall efficiency.
- To identify any issues or limitations in the design and make necessary improvements to optimize the vehicle's performance and reliability.
Overall, the project aims to develop an innovative and efficient electric vehicle prototype that utilizes advanced technologies to provide a smart and reliable obstacle avoidance mechanism, and is capable of responding to voice commands through an easy-to-use app interface.
III. SPECIFICATIONS
- Automatic Obstacle Avoidance: The system should be designed to detect obstacles in its path and automatically navigate to an obstacle-free path.
- Voice-controlled: The system should be controlled by voice commands, which will be transmitted through an Android application. The system should be able to recognize the following voice commands: "Move Forward", "Move Backward", "Turn Right", and "Turn Left."
- Battery-powered: The system should be powered by rechargeable batteries. The battery should have a long lifespan to ensure prolonged usage of the system.
- Sensor-based: The system should be equipped with a PIR sensor and Ultrasonic sensors to detect obstacles in its path accurately.
- Motor Driver Module: The system should be equipped with an L298N motor driver module to control the movement of the robotic vehicle.
- Bluetooth Module: The system should be equipped with an HC-05 Bluetooth module to facilitate communication between the Android application and the Arduino UNO microcontroller.
- Size and Weight: The system should be lightweight and compact, making it easy to transport and manoeuvre. The size and weight of the components should be carefully considered to achieve this objective.
- User-Friendly: The Android application should be user-friendly and easy to navigate. The system should be designed to provide users with a seamless experience while controlling the Smart Electric Vehicle.
- Cost-effective: The components used in the system should be readily available and cost-effective. The system should be designed to be affordable to ensure that it can be accessible to a wide range of users.
IV. LITERATURE REVIEW
In this section, we have examined previous research conducted in the same field, and we have provided a condensed overview of the methods and operational principles employed in those studies.
- Esra Y?lmaz et al. [1] presents a comprehensive design of an Arduino-based electric vehicle that is capable of performing basic driving tasks such as accelerating, braking, and steering. The design is based on an open-source hardware platform that allows for flexibility and customization. The authors have implemented a wireless communication system that enables remote control of the vehicle using a smartphone app. The vehicle can be powered by a rechargeable lithium-ion battery, which is a sustainable and eco-friendly option. However, the vehicle design is limited to basic driving tasks and does not include more advanced features such as GPS navigation or autonomous driving capabilities and the maximum speed of the vehicle is limited to 5 km/h, which may not be suitable for certain use cases. Also, the wireless communication system used in the project has limited range, which may restrict the distance at which the vehicle can be controlled.
- Ekeh Godwin et al. [2] presents a design for an electric vehicle with a modular architecture that allows for flexibility and customization. The vehicle design includes an intelligent power management system that optimizes energy use and enhances vehicle efficiency. The authors have proposed a cloud-based remote monitoring system that enables real-time monitoring of the vehicle's performance and location. The vehicle includes advanced safety features such as a collision warning system and lane departure warning system. The authors have conducted a detailed simulation analysis of the vehicle's performance and energy efficiency. However, the paper lacks information on the physical implementation of the vehicle design. The proposed cloud-based monitoring system may be costly and may require reliable internet connectivity, which may limit its accessibility in certain areas. The vehicle's advanced safety features may increase the overall cost of the vehicle, making it less accessible to consumers.
- Uthra B. et al. [3] presents a comprehensive design of an electric vehicle with an advanced energy management system that uses solar panels and a hybrid energy storage system. The energy management system optimizes energy use to maximize vehicle range and efficiency. The authors have implemented a real-time vehicle monitoring system that enables remote monitoring of the vehicle's performance and location. The vehicle includes advanced safety features such as an automatic emergency braking system and adaptive cruise control. The paper includes a detailed simulation analysis of the vehicle's performance and energy efficiency. However, the design is complex and may be challenging to replicate for researchers with limited experience or resources. The vehicle's range may be limited in areas with limited access to sunlight or inconsistent weather patterns. The hybrid energy storage system includes multiple components that may increase the overall weight and complexity of the vehicle. The use of advanced safety features may increase the cost of the vehicle, making it less accessible to consumers.
- Faiza Tabassum et al. [4] presents a design for an electric vehicle with a lightweight and aerodynamic body, which enhances the vehicle's range and efficiency. The authors have developed an intelligent power management system that optimizes energy use and enhances the vehicle's performance. The vehicle includes a regenerative braking system that recovers energy during braking and improves the vehicle's efficiency. The proposed design is scalable, which enables the vehicle to be adapted to different sizes and applications. However, The paper lacks information on the physical implementation of the vehicle design. The vehicle's lightweight and aerodynamic body may increase the overall cost of the vehicle, making it less accessible to consumers. The proposed regenerative braking system may require additional maintenance, which may increase the overall cost of the vehicle. The paper does not provide information on the vehicle's manufacturing cost, which may impact its commercial viability. Overall, the paper presents an innovative design for an electric vehicle with a lightweight and aerodynamic body and an intelligent power management system.
- Azargoshasb et al. [5] presents a design for a three-wheeled electric vehicle that is lightweight and compact, making it suitable for urban commuting. The authors have developed an intelligent power management system that optimizes energy use and enhances the vehicle's performance. The vehicle design includes a regenerative braking system that recovers energy during braking and improves the vehicle's efficiency. The authors have conducted a detailed simulation analysis of the vehicle's performance and energy efficiency. The proposed design includes a mobile app that allows users to remotely monitor and control the vehicle's functions. However, the paper lacks information on the physical implementation of the vehicle design. The proposed vehicle design may have limited stability compared to four-wheeled vehicles, which may impact its safety. The vehicle's lightweight design may increase the overall cost of the vehicle, making it less accessible to consumers. The paper does not provide information on the vehicle's manufacturing cost, which may impact its commercial viability.
V. SYSTEM ARCHITECTURE
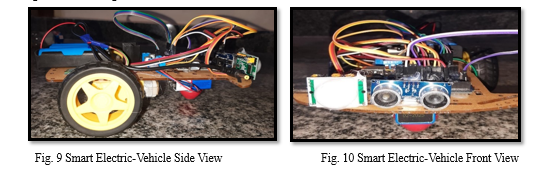
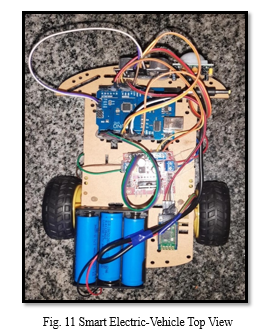
The proposed project aims to develop a compact electric vehicle controlled through an Arduino board and a mobile application. Voice commands will be used to control the vehicle's movements and features. The integration of sensors and modules will enhance its functionality and safety, including obstacle detection and avoidance. This project seeks to create an innovative and user-friendly electric vehicle experience.
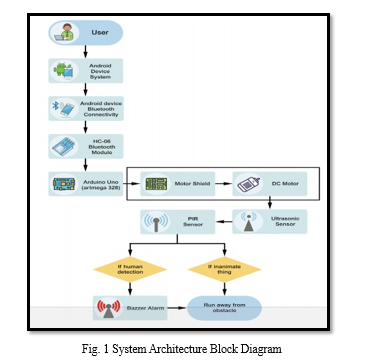
To build the SEV, we first need to assemble the vehicle itself. We will use a small frame and attach two DC motors to the underside, which will power the vehicle's movement. The motors will be controlled by an L298N motor driver module, which will be connected to the Arduino board. The Arduino board will also be connected to several sensors and modules, including an ultrasonic sensor, a PIR sensor, and an HC-05 Bluetooth module. The ultrasonic sensor will be used to detect obstacles in the vehicle's path, while the PIR sensor will detect the presence of people or objects nearby. The HC-05 Bluetooth module will be used to connect the mobile application to the vehicle, allowing users to control it remotely. To control the vehicle through the mobile application, we will need to use an "Arduino Voice Control" android app. The application will connect to the
HC-05 Bluetooth module and will send signals to the Arduino board to control the vehicle's movements. Users will be able to use voice commands to control the vehicle's speed, direction, and other features.
The methodology for this project will involve several steps. First, we will need to gather all the necessary components and assemble the vehicle. Once the vehicle is assembled, we will need to program the Arduino board and connect all the sensors and modules. We will then need to design and develop or use the already existing Android application, integrating it with the HC-05 Bluetooth module and Arduino board. Testing and calibration will be an important part of the methodology. We will need to test the vehicle's movement and sensors, making sure they are functioning properly and accurately detecting obstacles and people. We will also need to test the mobile application, ensuring that it is correctly sending signals to the vehicle and that voice commands are being properly recognized. Overall, the methodology for this project involves a combination of mechanical assembly, electronic circuit design, software development, and testing and calibration. By following this methodology, we will be able to successfully build and test an Arduino-based Smart Electric Vehicle that can be controlled using voice commands through a mobile application.
VI. COMPONENTS DESCRIPTION
A. Arduino Uno
Arduino Uno is a popular microcontroller board based on the ATmega328P microcontroller chip. It is an open-source electronics platform that is designed for building interactive projects. Arduino Uno is widely used in the maker community and has become the standard for creating DIY electronics projects. The Uno board was the successor of the Duemilanove release and was the 9th version in a series of USB-based Arduino boards. The ATmega328 on the board comes pre-programmed with a bootloader that allows uploading new code to it without the use of an external hardware programmer. While the Uno communicates using the original STK500 protocol, it differs from all preceding boards in that it does not use a FTDI USB-to-UART serial chip. Instead, it uses the Atmega16U2 (Atmega8U2 up to version R2) programmed as a USB-to-serial converter.
B. Ultrasonic Sensor HC-SR04
The HC-SR04 Ultrasonic Sensor is a popular distance measuring sensor used in various applications such as obstacle detection, robotics, and automation. It uses ultrasonic waves to detect objects and measure distances with high accuracy. The sensor has two ultrasonic transducers - one acts as a sender that emits ultrasonic waves, and the other acts as a receiver that receives the reflected waves. By calculating the time taken for the waves to travel back and forth, the sensor can determine the distance of the object from the sensor. The HC-SR04 sensor is low-cost, easy to use, and widely available, making it a popular choice for hobbyists and professionals alike.

The HC-SR04 Ultrasonic Sensor has the following specifications:
- Operating Voltage: 5V DC
- Operating Current: 15Ma
- Operating Frequency: 40kHz
- Measurement Range: 2cm to 400cm
- Resolution: 0.3cm
- Accuracy: ±0.3cm
- Trigger Pulse Width: 10μs
- Echo Pulse Output: Positive TTL pulse
- Trigger Input Signal: 10μs high-level signal
- Echo Signal: Output TTL level signal
- Maximum Range: 4 meters
- Minimum Range: 2 centimetres
- Beam Angle: approximately 15 degrees
- Operating Temperature: -10°C to 70°C
- Dimensions: 45mm x 20mm x 15mm
- Weight: 9 grams
C. PIR Sensor
Passive Infrared (PIR) sensor is a type of electronic sensor that detects the presence of an object in its surrounding area by measuring the infrared radiation emitted by the object. PIR sensors are commonly used in security systems to detect motion or presence of an intruder.

Features:
- PIR sensors are passive, meaning they do not emit any signal or energy to detect objects.
- They are highly sensitive and can detect even small movements of living beings or objects emitting infrared radiation.
- They are easy to install and require low power consumption.
- They are reliable and have a long lifespan.
Specifications:
- Detection Range: PIR sensors have a detection range of up to 30 feet depending on the model and brand.
- Detection Angle: They have a detection angle of up to 180 degrees, providing a wide coverage area.
- Sensitivity: PIR sensors can detect small changes in temperature, making them highly sensitive to movement.
- Response Time: They have a fast response time, typically less than 0.3 seconds, ensuring quick detection of any movement in the area.
- Operating Voltage: PIR sensors typically operate on a voltage range of 5-12V DC, making them compatible with most electronic systems.
- Output Signal: PIR sensors provide a digital output signal, indicating the presence or absence of motion in the area.
D. L298N Motor Driver Module
The L298N is a popular dual H-bridge motor driver integrated circuit that can be used to control the speed and direction of two DC motors or a bipolar stepper motor. It is commonly used in robotics, automation, and other motion control applications. The L298N module is a compact board that includes the L298N IC, voltage regulator, and protection diodes.
Features:
- Dual H-bridge motor driver: can control two DC motors or a bipolar stepper motor
- Input voltage: 5V to 35V
- Output current: up to 2A per channel (with proper heatsinking)
- Built-in voltage regulator: provides 5V output to power external components
- Built-in protection diodes: prevents damage from back EMF generated by the motors
- Control inputs: four digital inputs (two per motor) for controlling direction and speed
- Compact size: easy to integrate into projects and systems
Specifications:
- Operating voltage: 5V to 35V
- Maximum output current: 2A per channel (with proper heatsinking)
- Logic voltage: 5V
- Control inputs: four digital inputs (two per motor)
- Dimensions: 43mm x 43mm x 27mm
- Weight: 30g
E. HC-05 Bluetooth Module
The HC-05 Bluetooth module is a popular wireless communication module that enables easy serial communication between microcontrollers and other Bluetooth enabled devices such as smartphones, tablets, and laptops. It is widely used in various IoT and embedded projects for wireless data transmission and remote control.
The HC-05 module operates on Bluetooth version 2.0 with an enhanced data rate (EDR) of up to 2Mbps, and can be configured as a master or slave device. It operates on a 3.3V power supply and consumes very low power, making it suitable for battery-powered applications.
The module uses a simple AT command set for configuring various parameters such as the device name, baud rate, pin code, etc. It can communicate with other Bluetooth devices within a range of up to 10 meters or even more in open spaces. The HC-05 module features a built-in antenna that provides better signal strength and coverage. It also has a status LED that indicates the current state of the module such as Bluetooth pairing, data transmission, etc. The module has a compact form factor, with dimensions of approximately 28mm x 15mm x 2.35mm, making it easy to integrate into various projects.
The HC-05 module has many features and specifications that make it an ideal choice for wireless communication in various embedded and IoT applications. Some of its notable features and specifications include:
- Bluetooth version 2.0 with Enhanced Data Rate (EDR) of up to 2Mbps.
- Can be configured as a master or slave device.
- Operating voltage range of 3.3V to 5V.
- Low power consumption of approximately 20mA in operation and 0.5mA in sleep mode.
- Maximum communication range of up to 10 meters.
- Simple AT command set for easy configuration of parameters.
- Built-in antenna for better signal strength and coverage.
- Status LED for indicating the current state of the module.
- Compact form factor for easy integration into various projects.
- Supports multiple Bluetooth profiles such as SPP, HID, etc.
F. DC Motor
DC motor stands for Direct Current motor, which is a simple electromechanical device that converts direct current electrical energy into mechanical energy. It is one of the most commonly used types of motors in various applications ranging from industrial machinery to household appliances.
Features of DC Motor:
1. Simple Construction: DC motors have a simple design that makes them easy to maintain and repair.
2. Easy to Control: DC motors can be easily controlled by varying the voltage applied to them, making them ideal for applications that require precise speed control.
3. High Torque: DC motors have a high starting torque, making them suitable for applications that require high initial force.
4. Wide Range of Sizes: DC motors come in a variety of sizes, ranging from small hobby motors to large industrial motors.
5. High Efficiency: DC motors are highly efficient, which means they convert a high percentage of electrical energy into mechanical energy.
G. Arduino Voice Control Android Application
Arduino Voice Control Android Application is a software application that allows voice commands to be sent to an Arduino microcontroller through an Android mobile device. This enables users to control various functions of their Arduino projects hands-free, making it a valuable tool for a variety of applications.
Fig. 8 Arduino Voice Control App Interface
Features:
- The application is user-friendly and easy to navigate, making it accessible to users of all levels of technical expertise.
- The voice recognition function is highly accurate and responsive, ensuring that commands are executed precisely and quickly.
- The application can be customized to suit the specific needs of the user, allowing them to add new commands and functions as required.
Applications:
- The application is suitable for a wide range of applications, including home automation, robotics, and industrial control.
- It is particularly useful for individuals with physical disabilities or limited mobility, allowing them to control their Arduino projects without the need for manual input.
- The application can also be used in educational settings to teach students about the principles of voice recognition and microcontroller programming.
Specifications:
- The application is compatible with any Android device running Android 4.0.3 or later.
- The application is compatible with any Arduino board that supports serial communication, including the Arduino Uno, Arduino Mega, and Arduino Leonardo.
- The Arduino board must be equipped with a Bluetooth or Wi-Fi module to receive voice commands wirelessly from the Android device.
H. Arduino IDE
Arduino Integrated Development Environment (IDE) is an open-source software platform used for programming Arduino microcontrollers. The platform was created by Arduino LLC, a company that designs and produces microcontroller-based development boards. It provides a user-friendly interface that allows even beginners to start programming and experimenting with their boards. It has a text editor that supports code highlighting, auto-indentation, and autocomplete functions, making it easy to write and edit code. The IDE also has a built-in serial monitor that allows users to view and send data from their boards. This is particularly useful for debugging and testing purposes. In addition to its simplicity, the Arduino IDE is also highly customizable.
It offers support for third-party libraries, allowing users to extend the functionality of their boards with additional features and capabilities. The Arduino IDE has a wide range of applications, including robotics, automation, prototyping, and education. It is widely used in schools and universities to teach students about programming and electronics. It is also used by hobbyists, makers, and professional developers in a variety of industries.
VII. WORKING
The Arduino-based Smart Electric Vehicle works by using various sensors and modules to detect the surrounding environment and respond to user commands. Here is a detailed working of the project:
- Sensor Data Acquisition: The Ultrasonic and PIR sensors detect the environment around the vehicle and send signals to the Arduino board.
- Data Processing: The Arduino board processes the signals from the sensors and sends commands to the L298N motor driver module to control the DC motors.
- Motor Control: The L298N motor driver module controls the speed and direction of the DC motors based on the commands received from the Arduino board.
- Bluetooth Communication: The HC-05 Bluetooth module establishes a wireless communication link between the Arduino board and the Android app.
- Voice Control: The Android app uses Google's speech recognition API to convert voice commands into text messages, which are then transmitted to the HC-05 Bluetooth module.
- Command Processing: The Arduino board receives the text messages and processes them to control the movement of the vehicle. For example, if the user says "forward," the Arduino board will send a command to the L298N motor driver module to move the vehicle forward.
- Vehicle Movement: The vehicle moves in the desired direction based on the commands received from the Arduino board.
The process to control the vehicle is as follows:
a. Pair the Android device with the HC-05 Bluetooth module.
b. Open the Arduino Voice Control Android application.
c. Speak the desired voice command (e.g., "forward," "backward," "turn left," "turn right," etc.).
d. The Android app converts the voice command into a text message and sends it to the HC-05 Bluetooth module.
e. The Arduino board receives the text message, processes it, and sends commands to the L298N motor driver module to control the movement of the vehicle.
f. The vehicle moves in the desired direction based on the commands received from the Arduino board.
Commands embedded in the Voice-control:
- Move Forward
- Stop
- Move Backward
- Move Left (Rotates 90 degrees)
- Move Right (Rotates 90 degrees)
- Move Fast
- Move Slow
- Rotate Left 30/60/270 degrees
- Rotate Right 30/60/270 degrees
Overall, the Arduino-based Smart Electric Vehicle provides a user-friendly and intuitive interface for controlling the movement of an electric vehicle using voice commands. The use of various sensors and modules ensures efficient and safe operation of the vehicle in different environments.
Conclusion
Based on the analysis of the research \"Arduino Based Smart Electric Vehicle,\" it can be concluded that it is a promising innovation in the field of electric vehicles. The proposed project aimed to design and develop an electric vehicle prototype that can be controlled wirelessly via Bluetooth using an Android application. The implementation of the project involved the use of various components, including Arduino Uno, L298N motor driver module, HC-05 Bluetooth module, and small DC motors. The project successfully achieved its objectives, which included the construction of a functional prototype, testing, and evaluation of the performance. The prototype demonstrated excellent functionality, with the Android application controlling the vehicle wirelessly via Bluetooth. The main advantages of these systems are their cost-effectiveness, accuracy, and ability to be controlled through voice commands. However, some limitations, such as the need for a clear voice command interface and efficient and precise real-time obstacle detection and avoidance, have been identified. The project also offered a lot of future scope for improvement and extension, including adding more features such as GPS tracking, and improving the design. Overall, the project is a significant step forward in the development of smart electric vehicles. With the growing demand for eco-friendly transportation, the implementation of such projects can contribute significantly to the reduction of pollution and greenhouse gas emissions. The project can also inspire and serve as a model for future research and development in the field of smart electric vehicles. Here are some possible future scopes for the Arduino based Smart Electric Vehicle project: 1) GPS Tracking: One potential future enhancement to the project could be the addition of a GPS tracking system. This would allow the vehicle to be tracked and monitored remotely, providing additional security and safety features. 2) Autonomous Driving: With the addition of sensors and software, the vehicle could be upgraded to include autonomous driving capabilities. This would allow it to navigate and operate on its own, without requiring human intervention. 3) Mobile App Integration: Another potential future enhancement to the project could be the integration of a mobile app. This would allow users to control the vehicle remotely using their smartphones, making it easier to operate and more convenient to use. 4) Solar Power Integration: The project could also be enhanced with the addition of solar power integration. This would allow the vehicle to be powered by renewable energy sources, reducing its carbon footprint and making it more sustainable. 5) Improved Obstacle Detection: The vehicle\'s obstacle detection system could be improved with the addition of more advanced sensors and algorithms. This would allow it to navigate more complex environments and avoid obstacles more effectively. 6) Wireless Charging: The vehicle could be upgraded with wireless charging capabilities. This would eliminate the need for cables and make it more convenient to charge the vehicle\'s battery. 7) Advanced Analytics and Reporting: The addition of advanced analytics and reporting features would allow users to monitor the vehicle\'s performance and usage patterns. This would provide valuable insights into its operation and help identify areas for improvement. Overall, there are many potential future enhancements that could be made to your Arduino based Smart Electric Vehicle project, from improved sensors and software to advanced analytics and reporting features. With continued development and investment, this proposed project has the potential to become a leading example of smart, sustainable transportation.
References
[1] Esra Y?lmaz, Sibel T. Özyer, \"Remote and Autonomous Controlled Robotic Car based on Arduino with Real Time Obstacle Detection and Avoidance\", Universal Journal of Engineering Science 7(1): 1-7, 2019. DOI: 10.13189/ujes.2019.070101 [2] Ekeh Godwin, Afolabi Yinka Idris & Anyanwu Onyekachi Julian, \"Obstacle Avoidance and Navigation Robotic Vehicle using Proximity and Ultrasonic Sensor, Arduino Controller\", International Journal of Innovative Information Systems & Technology Research 9(2):62-69, April-June, 2021. [3] Uthra.B, Adchiya.D, Anupriya.K, \"Live Human Detection System for Earthquake Rescue Operation\", Journal of Computation in Biosciences and Engineering, Published: September 11, 2015. [4] Faiza Tabassum, Susmita Lopa, Muhammad Masud Tarek & Dr. Bilkis Jamal Ferdosi, \"Obstacle Avoiding Robot\", Global Journal of Researches in Engineering: H Robotics & Nano-Tech, Volume 17 Issue 1 Version 1.0 Year 2017. [5] S. Azargoshasb, A. H. Korayem, Sh. Tabibian, \"A Voice Command Detection system for controlling Movement of SCOUT Robot\", International Conference on Robotics and Mechatronics (IcRoM 2018), October 23-25, 2018, Tehran, Iran.
Copyright
Copyright © 2023 Md. Khadeer Khan, A. Vivek, K. Jithendhar, V. Suresh Kumar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET52433
Publish Date : 2023-05-17
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online