

Ijraset Journal For Research in Applied Science and Engineering Technology
Artificial Intelligence Enabled Robotic Trash Boat to Drive and Harvest Floating Trash from Urban Drain
Authors: S. Kuzhaloli, Praveen M, Thirugnanasampantham N, Harini P
DOI Link: https://doi.org/10.22214/ijraset.2023.51408
Certificate: View Certificate
Abstract
This project aims towards the collection of waste from water bodies in a hassle-free manner. It uses artificial intelligence to detect any floating trash present in the water body. If the trash is detected by the camera present on the boat, it moves towards the next step of collecting the trash using the robotic arm which is manipulated automatically depending on the distance of the boat from the floating trash. It is designed to store a maximum weight of up to 5kg of trash. Moreover, it uses autonomous navigation to navigate in the water bodies without any assistance from the user. By using AI-enabled robotic trash boats, cities can take a proactive approach to address the issue of floating trash in their drains, improving the overall health and appearance of their important waterway systems. By removing floating trash, the harmful gases and mosquitoes will be reduced. This system will be more advanced as this would collect down the floating-degradable wastes with the help of image processing.
Introduction
I. INTRODUCTION
Water is an important natural resource for all forms of life on this planet. Even though many countries are blessed with huge amounts of water resources, most of the water resources are polluted. But the cleanliness of water is important for the survival of life. Clean water is the right of every resident of the planet Earth it comes from clean rivers & lakes. But the evolution of science has led to a catastrophic effect on Water bodies. If the quality of the water is not maintained, then our drinking water resources will reduce in both quantity & quality over a while. This can harm us in a plethora of ways including diseases, the growth of dangerous viruses, etc.
In particular, floating trashes in the water bodies has polluted water bodies and subsequently, has also presented a major threat to the lives of river habitats. Protecting the water resources is our responsibility, & if not taken care of, can cause a danger to us & the future generation. According to statistics for 2022, it is said that 100 million marine animals die from plastic waste alone and sad that 1,00,000 marine animals die from getting entangled in plastic. Polluted water spread Diseases like cholera, giardia, typhoid etc.
Contaminated water is classified into three categories They are, clean water, grey water, and black water are the three types. The contaminated water that leads to illness is grey or black water.
These waters may be the result of improper disposal of garbage and overflow of water resources which acquire the trashes from land into water bodies as well as other sources. Black water is the most contaminated and is more likely to result in serious illness. So, our project does the automated trash collection process using image processing techniques and our project also does sample collection of water bodies and evaluates basic parameters of water that can be sensed from it so the contaminated water can be treated in prior in the right way at the right time.
Hence, a solution has been required to solve this problem with the least human intervention by using the latest & cost-effective technology. The main aim of our project is to design and develop an Artificial intelligence-enabled robotic trash boat to drive & harvest floating trash from the urban drain. This will happen only through the adoption and sustained usage of advanced technologies like artificial intelligence and robotics in the playground of the system to collect the maximum amount of waste and store it in the storage box to dispose of its waste easily, another important thing is easy removal of waste, collected, taking care of the safety of the user our system provides user and environment-friendly method of disposal of collected waste. It improves the overall cleanliness and appearance of water bodies. This will result in reducing the harmful environment to the aquatic animals.
II. LITERATURE SURVEY
The accumulation of floating trash in urban drains is a major environmental problem that requires innovative solutions to promote sustainability. The traditional methods of cleaning these drains involve manual labour, which is time-consuming and labour-intensive. The development of an AI-enabled robotic trash boat that can autonomously drive and harvest floating trash from urban drains has the potential to significantly reduce environmental pollution and promote sustainable solutions for the issue. In this literature review, we will discuss the existing literature on the development of an AI-enabled robotic trash boat for harvesting floating trash from urban drains.
A. Related Work
- In 2018, a team of researchers from the Massachusetts Institute of Technology (MIT) developed an AI-powered robotic boat named "Seacharger" that can autonomously collect trash from water bodies. The boat uses machine learning algorithms to identify and collect trash and has been successfully tested in a controlled environment. The researchers hope to further develop the technology to enable the boat to collect trash from larger water bodies on a larger scale, as well as to improve the boat's ability to navigate through complex environments.
- In 2019, a team of researchers from China developed an autonomous surface vehicle (ASV) that can collect floating trash from water bodies. The ASV is equipped with sensors and cameras that enable it to detect and identify trash, and it uses a machine-learning algorithm to navigate the boat and collect trash. The researchers have successfully tested the ASV in a real-world environment and plan to improve its capabilities for collecting trash from water bodies.
- In 2020, researchers from the National University of Singapore developed an autonomous robot that can clean urban drains. The robot is equipped with sensors and cameras that enable it to navigate the drain and collect trash efficiently. The researchers used a machine learning algorithm to analyse the sensor and camera data and make decisions about the robot's navigation and trash collection.
- In 2021, a team of researchers from India developed an autonomous boat that can collect floating trash from water bodies. The boat is equipped with sensors and cameras that enable it to detect and identify trash, and it uses a machine-learning algorithm to navigate the boat and collect trash.
All the above work has the potential to help address the growing problem of ocean pollution and improve the health of our oceans and waterways. Especially the research in 2021 The researchers have successfully tested their robot in a real-world environment and it resulted in showcasing its potential to the research community that it can significantly reduce environmental pollution caused by trash and debris in urban drains. The development of these autonomous technologies for trash collection not only helps address the problem of ocean pollution but also reduces the need for human labour, which can be dangerous and time-consuming. Additionally, the use of machine learning algorithms allows for more efficient and precise trash collection, potentially saving resources and costs in the long term.
III. METHODOLOGY
The development of the AI-enabled robotic trash boat involves several stages. The first stage involves the boat's design and construction, which includes installing sensors and cameras that enable it to detect and identify floating trash. The boat's AI system is then developed, which involves the creation of a machine learning algorithm that can analyse the input from the sensor and camera and make decisions about the boat's navigation system and trash collection activity.
During the second stage of development, the autonomous boat is subjected to tests in a controlled environment to verify its ability to accurately detect and identify floating trash, as well as navigate and collect it efficiently. Additionally, the boat's AI system is assessed to ensure it can make quick decisions about trash collection and navigation.
In the third stage, the boat is put to the test in a real-world scenario to assess its ability to collect floating trash from urban drains. The performance of the boat's AI system is also analysed to determine its navigation and trash collection accuracy and efficiency. The AI system is evaluated in this phase which needs some improvement in the training of data.
In the fourth stage of development, the robotic boat underwent rigorous testing to ensure all necessary improvements and corrective measures had been implemented. The boat was then put to the test using real-time data to evaluate its performance in collecting floating trash from water bodies. The boat's autonomous navigation system was found to work efficiently with minimal delays, indicating its potential to help address the growing problem of ocean pollution and improve the health of our waterways.
In the fifth stage, the boat's functionality was expanded to include remote monitoring and control capabilities. This was achieved by integrating the boat's navigation and trash collection system with a remote monitoring system that allowed operators to monitor the boat's activity in real time. These increased the boat's potential to contribute to the reduction of ocean pollution and the preservation of our waterways.
During the sixth stage of development, the boat's control and functionality were made more user-friendly to improve its accessibility to the general public. This involved simplifying the boat's control interface and providing user manuals and guidelines that enable even non-experts to operate the boat with ease. The boat was then made available to the public, allowing people to interact with the system and provide feedback on its user-friendliness, which helped to further improve the boat's design and functionality. This collaborative approach allowed the boat to become more widely accepted and adopted, leading to an increased potential for the reduction of ocean pollution and the preservation of our waterways.
All the above-discussed stages have involved several processes in designing and developing trash-collecting boats such as software, hardware and electrical setup, and mechanical. Let us discuss it further in detail.
A. Software Process
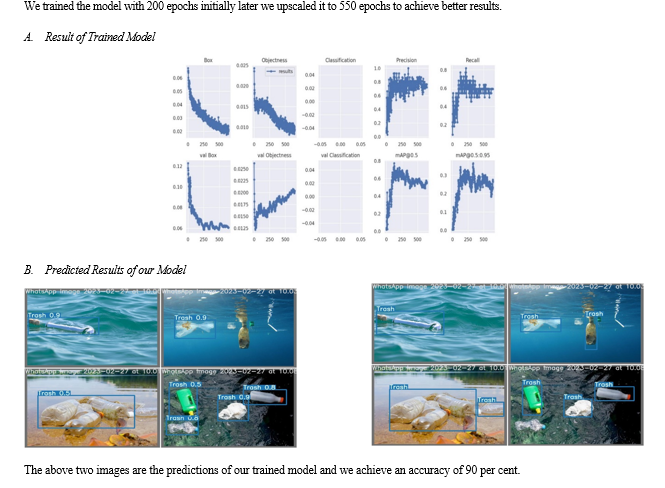
The camera installed on the boat continuously fetches images of its path of the boat. This video stream is sent to the central computer on the boat, which then processes the images & detects if any waste is in the water. This result is achieved with the help of a Deep Learning Object recognition algorithm that involves detecting & discerning objects in digital photographs. Image classification involves predicting the class of the object present in the image. To successfully apply Computer Vision & Deep Learning techniques to images, our model is trained using a dataset of floating trash images on YOLO v7 (You Only Look Once) is used and which is the latest version of the object detection algorithm.
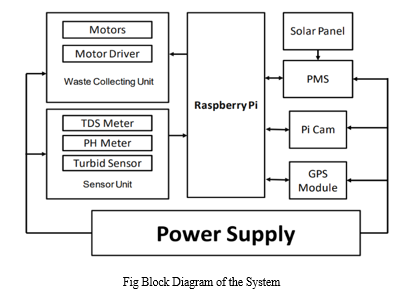
As per the block diagram, all the components were interfaced and programmed in this process. This includes interfacing the TDS Meter, PH Meter, and Turbid Sensor and displaying their respective values in a user dashboard. And GPS Module is interfaced to locate the boat over the internet and to have its geo-fencing to avoid any theft of the boat.
Languages used in the software process to develop the system:
- Python for object detection, sensor interfacing, and autonomous navigation system.
- HTML CSS and JS for WEB App that enables and provide Real-time information about the boat and monitoring and controlling it.
B. Hardware and Electrical Setup
The IR sensor module is used to find if the storage subject is full. The IR sensor senses the quantity of trash present in the container every time trash is collected from the water bodies and put into the container. Once the bucket is full, the IR sensor sends out the desired signal to the central system which then signals the boat to the reverse path to the initial point using the fixed path. Along with deep learning, the boat also utilizes a sensor to find the accurate distance from the trash, which further helps collect the trash from the water bodies. During all these operations, the speed of the boat is reduced or increased at some instants during its course of travel in the water bodies. This speed reduction is handled by the motor driver connected to the main motors. This process persists without interruption.

Two geared DC motors were used to help the boat to drive in the waterways both upstream and downstream. TDS Meter, PH Meter, and Turbid Sensor are placed at the backside of the boat to make sure that it has the required amount of contact with water. Two geared dc motor is used to build the conveyor belt to load the waste into the storage container. The Entire system is powered by a 24-volt lithium-ion battery and a Power Delivery and Management System (PMS) supports it.
C. Mechanical Setup
The mechanical setup for the trash boat is the bin to collect the trash from the water bodies where the waste will be detected and disposed of in a respectful manner and the Mechanical robotic arm which is used to pick up the floating trash and drop it in the bin which then carried to the respective place once the maximum weight is reached(5kg). The boat is powered with two geared dc motors for driving the boat across the lake. And one geared dc motor to power up the conveyer belt mechanical arm of the boat. The Belt of the conveyor is made up of netted material that rolled from one end to another to the conveyor roller.
IV. RESULT
The dumping of trash into water bodies, which cannot be degraded and get collected and infected withinside the water bodies. This results in the release of toxic compounds and the water becomes polluted, killing the plants and aquatic animals. So, our project results can be rapid, with noticeable changes in just a matter of days. Our system will be a combination of detection and cure. Water contamination will be minimized.
V. FUTURE SCOPE
- Expansion to other Water Bodies: The technology can be expanded to other water bodies like rivers, lakes, and oceans to reduce the accumulation of floating trash and promote sustainability.
- Integration with other Technologies: The AI-enabled robotic trash boat can be integrated with other technologies such as Unmanned Aerial Vehicles (UAVs) and remote sensing technology to increase the efficiency of the trash collection process.
- Collaboration with Governments: Governments can collaborate with private companies and non-profit organizations to develop and implement the technology on a larger scale to reduce the accumulation of floating trash and promote sustainability.
- Improvement in Sorting and Recycling: The harvested trash can be sorted and recycled using advanced technology to reduce environmental pollution and promote sustainability.
- Use in Disaster Management: The technology can be used in disaster management situations to collect floating debris and prevent it from damaging the environment and endangering public health.
- Improvement in Battery Technology: The development of more efficient battery technology can help to increase the operating time of the AI-enabled robotic trash boat, allowing it to collect more trash and operate for longer periods.
Conclusion
Our project aims at minimizing the amount of waste dispersed in the water bodies with minimum effort and maximum quality of service without endangering any lives in the process. It is a major optimization of earlier designs implemented in this domain to accomplish the waste collection task from water bodies. To achieve maximum efficiency, steps are taken to eliminate any trade-offs from the earlier designs. The system is trained on images of plastic trash where the dataset has generated varying images of plastic. We have collected a dataset of more than 300 images and videos of different types of plastic trash found usually in water bodies. Once these images are collected, they have to be annotated with boundary boxes using the image annotation tools. For the sake of simplicity, the images have been classified into three different classes Plastic Waste, Bottles, net, wood etc. It aims towards collecting a maximum of 5kg of trash. Thus, it saves time by employing modern technologies to achieve this task. The development of an AI-enabled robotic trash boat for harvesting floating trash from urban drains is an innovative solution that can significantly reduce environmental pollution and promote sustainability. The existing literature suggests that the technology has enormous potential and has been successfully tested in controlled and real-world environments. However, further research is needed to improve the technology\'s capabilities and integrate it with other technologies to increase efficiency and reduce environmental pollution.
References
[1] Kumar, Sudhanshu, et al. \"Wireless Controlled Lake Cleaning System.\" International Conference on Intelligent Computing & Smart Communication 2019. Springer, Singapore, 2020. [2] Nagesh, Bh, Mr M. Upendra, and Ms T. Hadassah. \"Innovative and novel concept in river surface cleaning using river trash skimmer of zero emissions–its implementation, approach & methodology.\" Journal of Offshore Structure and Technology 6.3 (2020). [3] Niu, Guanchong, et al. \"SuperDock: A Deep LearningBased Automated Floating Trash Monitoring System.\" 2019 IEEE International Conference on Robotics and Biomimetics (RO BIO). IEEE, 2019. [4] Yazdi, J. \"Water quality monitoring network design for urban drainage systems, an entropy method.\" Urban Water Journal 15.3 (2018). [5] Hossain, S., Debnath, B., Anika, A., Junaed-Al-Hossain, M., Biswas, S., & Shahnaz, C. (2019). Autonomous Trash Collector Based on Object Detection Using Deep Neural Network. IEEE Region 10 Annual International Conference. [6] P. Elavarasi1, S. A. Meenuppriya2, M. Monira3, P. Priya4, P. Reni5. “Artificial Intelligence Enabled Robotic Trash Boat to Drive and Harvest Floating Trash from Urban Drain” 2020 IJESC. [7] YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors Chien-Yao Wang1, Alexey Bochkovskiy, and Hong-Yuan Mark Liao1 Institute of Information Science, Academia Sinica, Taiwan kinyiu@iis.sinica.edu.tw, alexeyab84@gmail.com, and liao@iis.sinica.edu.tw. [8] Alexander Kirillov, Ross B. Girshick, Kaiming He, and Piotr Dollar. Panoptic feature pyramid networks. In ´ Proc. IEEE Conf. Comp. Vis. Patt. Recogn., pages 6399–6408, 2019. [9] Chen et al. BlendMask: Top-down meets bottom-up for instance segmentation. CVPR, 2020. 17. [10] Maji et al. YOLO-Pose: Enhancing YOLO for Multi-Person Pose Estimation Using Object Key Point Similarity Loss. CVPRW, 2022. 17.
Copyright
Copyright © 2023 S. Kuzhaloli, Praveen M, Thirugnanasampantham N, Harini P. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET51408
Publish Date : 2023-05-01
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online