

Ijraset Journal For Research in Applied Science and Engineering Technology
Review Paper on Automated Domestic Vacuum Cleaner Robot
Authors: Abhishek Sutar, Ashish S, Gagan Deep K, Prashanth Kumar K M, Prof. Deepthi Raj
DOI Link: https://doi.org/10.22214/ijraset.2022.40708
Certificate: View Certificate
Abstract
Modern households are moving towards automation, there by delivering convenience and reducing time spent on house chores. While vacuum cleaners have made cleaning easier, they are large, noisy and bulky for everyday use. It is there for necessary to improve the technology of vacuum cleaning to reduce these deficiencies. As of 2021 due to the ongoing pandemic of Covid-19, keeping our living space clean and sanitized has become a high priority. The work load of people is shifted from offline work in offices to online work at home, due to which the workload has increased greatly on many people, which may lead some people to disregard cleaning their surroundings. In the present-day scenario, all members of a family are busy with their work and are to clean the house. The cleaning robot helps to clean and sanitize the floor just by simply pressing a switch. This also cuts down the extra labor used in the house for cleaning purpose. Above being the case, motivated for the design and development of an automatic cleaning robot - “Automated Domestic Vacuum Cleaner Robot” that does all the cleaning and sanitizing work with a simple press of a button.
Introduction
I. INTRODUCTION
A. Overview
Robots are widely used in modern industrial manufacturing, in households, entertainment, and the security sector; some robots are built and developed for various applications to support humans as companion, caretaker, or domestic support. With such wide popularity and usage of robots worldwide, it is significant to use robots to overcome the real-time problems. A major challenge the world is facing in current pandemic situation is hygiene and sanitization. Usages of autonomous robotic vacuum cleaners help us to overcome this problem.
B. Automation
“Automation is the creation and application of technologies to produce and deliver goods and services with minimal human intervention. The implementation of automation technologies, techniques and processes improve the efficiency, reliability, and/or speed of many tasks that were previously performed by humans”.
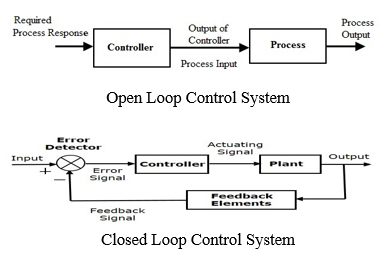
Autonomous models have two operating modes:
- Open loop: In open-loop control, the control action from the controller is independent of the "process output".
- Closed loop (feedback): In closed-loop control, the control action from the controller is dependent on the process output.
C. Robotics
“Robotics is the intersection of science, engineering and technology that produces machines, called robots, that substitute for (or replicate) human actions”. Robotics involves design, construction, operation, and use of robots. The aim of robotics is to design machines, which can help and assist humans. Robotics is cumulation of mechanical engineering, electrical engineering, information engineering, mechatronics, electronics, bioengineering, computer engineering, control engineering, software engineering, and others. Robots are substitute for humans, which can replicate human actions. Robots are used in multipurpose real-time applications such as home automation; they can also be used in dangerous environments like radioactive environment, detection and deactivation of bomb scenario, manufacturing processes which are toxic to humans (for example, in space expeditions, underwater, in high temperature environment, and cleaning up biohazard wastes and highly contaminated waste). Robots can take on any form but some are inclined to resemble humans in appearance. This helps in the acceptance of a robot in certain replicative behaviors performed by people. Such replicative behaviors are walking, lifting, speech, cognition, or any other human activity. Robots are efficient in mimicking human actions thus help in overcoming the limited skilled labour workforce in the society.
???????II. LITERATURE SURVEY
A. Irawan, Yuda, Muhardi, Muhardi, Ordila, Rian, AND Diandra, Roni. “Automatic Floor Cleaning Robot Using Arduino and Ultrasonic Sensor” Journal of Robotics and Control(JRC). (July 2021)
This paper discusses about information regarding several parts, namely of an Ultrasonic Sensor, Motor Shield L298, Arduino Uno microcontroller, Servo, and Dc Motor. This tool works when the Arduino Uno microcontroller processes the ultrasonic sensor as a distance detector and a DC motor as a robot driver, then the DC motor is driven by the Motor Shield L298. When an ultrasonic sensor detects a barrier in front of it, the robot will automatically look for a direction that is not a barrier to the floor cleaning robot. The distance value on the sensor has been determined, that is, when the distance read by the ultrasonic sensor is below 15 cm. The results of testing the value of the ultrasonic sensor distance found different conditions that occur. In a distance of> 15 cm, the condition of the prototype cleaning robot for the road floor cleaning is obtained, while the distance <15 cm, the condition for the prototype of the street floor cleaning robot has stopped.
B. “Design and Manufacturing of Automatic Classroom Vacuum Cleaning Robot” by Aniket A Somwanshi; Sanjay B Matekar. Publisher - International Journal of Engineering Research & Technology (IJERT). (October 2019)
Robot an electromechanical device automates the work process in many areas like industrial power plants, military applications, domestic work, agricultural applications, etc. Robots are reliable means to carry objects, clean an area, etc. at places where human interventions are rather impossible or can cause hazardous effect on human health i.e., at nuclear power plants, chemical factories. The design prototype of Automatic Classroom Vacuuming Robot is discussed in thispaper (using User Interface Elements in Power Control of Electronic Devices employedinOffice/ConsumerEnvironments).Thispaperalsosummarizestherecentresearch towards the design of wheels, design of chassis, motor calculations for navigation, vacuum design in the implementation of automatic vacuum cleaner. There were different types of wheels tested for the design of the robot. The wheels that were considered are origami wheels, track wheels, lopper wheels. Origami wheels were de formable in shape and size. Track wheels were mainly used in tank robots, which did not serve the purpose. Lopper wheels were the wheels that were used in the robot they had created, which was derived according to the requirement. It was observed that Lopper wheels would be easier to manufacture and economic as well. The Lopper wheels were manufactured and tested. The three loped lopper wheels had the problem of sequential fluctuations. In order to overcome this problem, a wheel having five lopes was tested. The results showed that the fluctuations were reduced gradually. A seven-loped wheel was manufactured and tested. The results of this wheel testing indicated a considerable reduction influctuations, so, the seven loped wheel was selected. The chassis was designed based on the required motion and the load that had to be carried. Vacuum cleaner selection was based on Bernoulli’s Principle. Bernoulli’s the or emimplies that if the fluid flows horizontally so that no change in gravitational potential energy occurs, then a decrease in fluid pressure is associated with an increase in fluid velocity.
C. “Design and Development of Automatic Cleaning and Mopping Robot” by P.S. Aditya; R. Tejas; V. Sai Varun; B. N. Prashanth. IOP Conference. (2019)
This paper reports “how to minimize the cost of your robot". The design procedure for creating the cleaning robot is what they have discussed at the starting of the paper. The steps for that are, deciding on how the process of cleaning and moping to be done, then the mechanical design of the chassis.
After this, we have the decision of choosing the right electronic equipment for it and buying the same. Finally assemble all the parts, then test and calibrate the robot. The working of the robot they have built follows per set path starting from one end of the room and finally completes the entire room cleaning. After reaching the other end of the room, robot changes its direction and follows the path perpendicular to the previous path. Robot changes the path if it encounters an obstacle. The movement technique used for the robot is a simple snake movement. The robot that was manufactured facilitated both mopping and vacuuming mechanism. It could work in both manual and automatic modes. Different approaches they took to build their robot where the power supply to the robot was chose to be led acid batteries to reduce the cost of the robot. The IR sensors, which were in use by most of the existing cleaning robots, were replaced by the Ultrasonic sensors, which were more accurate. The bumper switches i.e., the limit switches were preferred over other non-contact sensors to increase the efficiency of the robot. The robot could cover around 90-92% of the area by their methodologies and rest of them could be cleaned by using the mobile phones, which could be connected to the robot via the Bluetooth.
D. “Vision-Based Dirt Detection and Adaptive Tiling Scheme for Selective Area Coverage” by Balakrishnan Ramalingam; Prabakaran Veerajagadheswar; Muhammad Ilyas;Mohan Rajesh Elara; Arunmozhi Manimuthu. Publisher-Hindawi. (December 2018)
This paper discusses about information regarding visual dirt detection algorithm and an adaptive tiling-based area coverage scheme for reconfigurable morphology robot. A three- layer filtering framework was used for Visual dirt detection, which includes edge detection, periodic pattern detection filter, and noise filtering. The periodic step patterned detection filter, step filters out the background of the floor image leaving only the dirty parts. The self-filtering technique is used to compute the appropriate filter function for the detection and identification of floor pattern frequency. The edge detection and enhancement step performs the edge detection and enhancement on the background subtracted floor images. The last part here is the noise removal and dirt analysis, which removes the noise that is being present in the previous stages using median filter. A tetromino, which consists of quad polyominoes is what is used by them. The detail description of the tetromino tiling algorithm and adaptive tiling scheme for segmented dirt area coverage planning described completely in this paper. Some of the things discussed are tetromino tiling theory, adaptive tetromino tiling algorithm, comparison with Ttrominoes. There were two experiments performed to validate the vision-based adaptive selective area coverage scheme in their work. The initial one was conducted for validating the dirt detection algorithm with real images of dirt and images collected from dirt database and latter experiment was for validating the adaptive tiling scheme with generated dirt map. The robustness of the visual dirt detection algorithm assessed by measuring the dirt detection ratio of different surfaces with various kinds of dirt types multimedia contents to the MUs. The objective is to eventually maximize the system delivery capacity. Simulation results demonstrate that the CSF provides the best performance in terms of hit rate and system delivery capacity.
E. “Development of a vacuum cleaner robot” by T.B. Asafa; T.M. Afonja; E.A. Olaniyan; H.O. Alade. Publisher-Mechanical Engineering Department, Ladoke Akintola University of Technology, P.M.B. 4000, Ogbomoso, Nigeria. (December 2018)
Designing a Robot Layout of the electrical components, effective interaction with real- world objects, restrictions in movement and many other important factors must be thought of before building a prototype. Working on calculation and design by ourselves using trial and error method takes a lot of time however this paper helped us in this regard, as it talks about the model design, restrictions and cleaning area along with the design and circuit layout interaction furthermore Performance evaluation of the prototype was easy thanks to this paper. Basics of building an automated robot for cleaning has multiple blocks namely Navigation, Collision detection, vacuuming and many more, each type of blocks and their interactions must be in sync for the robot to work properly without any error. Design of the chassis, circuit for the limited space, navigation, and vacuum was made easy along with challenges faced, recommended changes and improvements, approximate cost, and code expectations thanks to the detailed explanation in the Report.
??????????????F. “Lessons Learned from Robotic Vacuum Cleaners Entering in the Home Ecosystem” by F Vaussarda; J Fink; V Bauwens; P Retornaz; D Hamel; P dilllenbourg; F Mondada. Publisher – Research Gate. (October 2014)
This paper emphasizes on how to deal with the faults of previous robotic vacuum cleaners, learn from them and to overcome these faults effectively by making necessary changes in the design of the robot. Analyzing the energy crisis that may occur in the future generation this report also has documented about the efficient use and management of energy by optimized power distribution in the system. The article deals with various navigation techniques that can be used in the vacuum robots for efficient usage of energy in the system. Based on the power ratings of our design we can choose the best navigation method that can be used.
Thus, the main aspects covered in this article are: Power management: Talks about effectively operating the system and cycle between the active and inactive components to increase the battery life of the unit. Navigation Techniques: Goes through multiple types of navigation which and their power consumption and accuracy of each type of navigation techniques used.
Conclusion
Households are becoming more automated, resulting in greater convenience and less time spent on home duties. While vacuum cleaners have made home cleaning easier, they are sometimes too noisy and cumbersome to be used on a regular basis. This robot shows the outcomes of the development of an autonomous mobile robot based on some new ideas that have emerged in this field over the last decade. It is capable of performing both sanitizing and vacuuming. The shape of the robot is well suited for the application, especially for a task like cleaning along a wall, around legs and in corners. Furthermore, the front panel with the sharp distance sensors is able to identify obstacles which then allow the robot to move in an obstacle free path. The developed robot is capable of dealing with a real environment in real-time. The combination of the robot’s shape, its sharp distance sensor system and its algorithm play well together and make the task of cleaning and sanitizing an unknown and unstructured environment feasible. It is able to contour an environment composed of walls and corners in an acceptable time. The change in the direction and the speed of the wheels will be matched accordingly. This project was centralized keeping in mind the dust encountered in Indian households. Its sanitizing feature is specifically curate for the present pandemic. It is very helpful as it plays a vital role in cleanliness of the society.
References
[1] Irawan, Yuda, Muhardi, Ordila, Rian, AND Diandra, Roni. \"Automatic Floor Cleaning Robot Using Arduino and Ultrasonic Sensor\" Journal of Robotics and Control(JRC) July 2021. [2] Jaeseok Kim, Anand Kumar Mishra, Raffaele Limosani, MarcoScafuro, At. All. “Control strategies for cleaning robots in domestic applications: A comprehensive review”, International Journal of Advanced Robotic Systems, July-August2019. [3] Aniket A Somwanshi, Sanjay B Matekar, “Design and Manufacturing of Automatic Classroom Vacuum Cleaning Robot”, International Journal of Engineering Research & Technology (IJERT), Vol. 8 Issue 10, October-2019. [4] P.S. Adithya, R. Tejas, V. Sai Varun, B.N. Prashanth, “Design and Development of Automatic Cleaning and Mopping Robot”, IOP Conf. Series: Material Science and Engineering 577(2019). [5] Balakrishnan Ramalingam; Prabakaran Veerajagadheswar; Muhammad Ilyas; Mohan Rajesh Elara; Arunmozhi Manimuthu, “Vision-Based Dirt Detection and Adaptive Tiling Scheme for Selective Area Coverage”, Hindawi. December-2018. [6] T.B. Asafa, T.M. Afonja, E.A. Olaniyan, H.O. Alade, “Development of a vacuum cleaner robot”, Alexandria Engineering Journal, Volume 57, Issue 4, December2018. [7] F.Vaussarda, J.Fink, V.Bauwens, P.Retornaz, D.Hamel, P.Dillenbourg, F.Mondada, “Lessons Learned from Robotic Vacuum Cleaners Entering in the Home Ecosystem”, Robotics and Autonomous Systems · October2014
Copyright
Copyright © 2022 Abhishek Sutar, Ashish S, Gagan Deep K, Prashanth Kumar K M, Prof. Deepthi Raj. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET40708
Publish Date : 2022-03-09
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online