

Ijraset Journal For Research in Applied Science and Engineering Technology
Automatic Traffic Sign Detection and Classification
Authors: P. Madhuri, G. Madhavi
DOI Link: https://doi.org/10.22214/ijraset.2023.54187
Certificate: View Certificate
Abstract
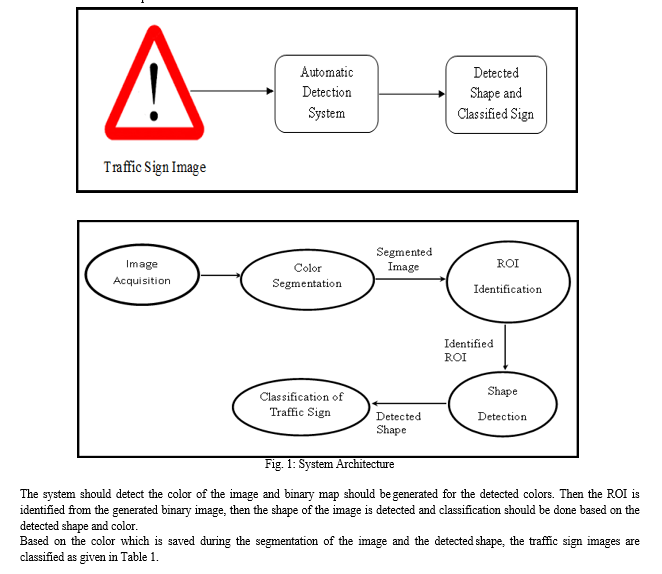
Automatic detection and recognition of road traffic signs is an essential task for regulating the traffic, guiding, and warning the drivers and pedestrians. Many challenges like cluttered background, foreground scenery, various geographic, metrological, weather conditions namely cloudy day, rain, snow, fog, changeable and uncontrollable lighting conditions depending on the time of the day exhibits the detection of road signs. The traffic sign may have different sizes and colors. Our goal is to detect the traffic signs with red, blue, yellow colors with any of the available shapes. Then the detected signs, combined with the color and shape information are classified. The recognition of Traffic sign involves two stages: detection stage, it finds the region consisting of traffic signs from the image and then the classification stage where the detected signs are categorized into different classes like information, warning, prohibition and so on. The image is acquired and is processed in CSR block, in which the base features from the image are extricated. The base features extricated from the image are color, shape, and Region of Interest (ROI) position. This pre-processing is very quick, because no special transformation is required. RGB and HSV color space is chosen for color segmentation. By extracting the color, CSR block creates 3 binary maps (red, blue, and yellow). From these binary maps, the shape of the traffic sign is detected. From the image the ROI is segmented, which is the input to the shape detecting block. After the shape is detected, traffic sign is classified according to its detected color and shape.
Introduction
I. INTRODUCTION
Traffic signs are the signs put up at the side to provide information to all the motorists, passengers, truck driver etc. The signs used in the olden days were simple wooden or stone milestones. Later, the signs with directional arms were initiated. For example, the fingerposts in the United Kingdom and their wooden counterparts in Saxony.
With traffic congestion increasing since the 1930s, many countries have approved pictorial signs or simplified and standardized their signs to overcome language barriers, and improve traffic safety. Such pictorial signs utilize the symbols place of words and are usually based on international protocols. Such signs were first progressed in Europe, and have been used by most of the countries.
Traffic signs can be categorized into eight like danger warning signs, priority signs, prohibitory or restrictive signs, mandatory signs, special regulation signs, information, facilities, or service signs, direction, position, or indication signs, additional panels.
Traffic signs are the control devices utilized to control the traffic and furnish useful information to make the driving safe and well timed. Traffic signs define a visual language which helps to convey messages to drivers and to generate user friendly road system which can be understood by everyone. These traffic signs are put forth to the driver that to need to be interpreted while driving. This may look as a simple task, but sometimes the driver misses the signs. Sometimes these traffic signs may be blocked by other objects and will not be properly visible to the drivers; these situations may lead to dangerous situations like accidents.
II. LITERATURE SURVEY
The Support Vector Machine approach is used for the detection as well as classification. Linear SVMs are utilized as geometric shape classifiers at detection phase. They work on the color segmented image. Blobs of Interest (BoI) are detected, once the color segmentation is done. Distance to Borders is used as the input vectors to execute the Linear SVM. The results show good success rates and few false positives in the final recognition stage. This approach is invariant to translation, rotation, scale and partial occlusions. It can recognize various geometric shapes, i.e., circular, octagonal, triangular and rectangular. But it requires enhancements in the performance to be applicable in real time.
Principle Component Analysis is used as minimized dimensional map. The drawbacks of PCA are high storage space requirement and computational complexity. PCA decomposes an n*n non sparse matrix, when the original space dimension is n. The representation that reduces the post-dimensional is generated by linear mapping as PCA is a linear mapping method.
Two-Dimensional Principle Component Analysis (2D-PCA) has been proposed as a new image recognition method. This method directly extracts feature from original matrix, minimizes computational complexity, training and feature extraction time.
PCA or 2D-PCA is rarely used to carry out the identification of traffic signs. The feature of traffic sing is extracted by using 2D-PCA and is then combined with the nearest distance classifier. Based on the database of two traffic signs, the traffic sing recognition test is done.
III. METHODOLOGY
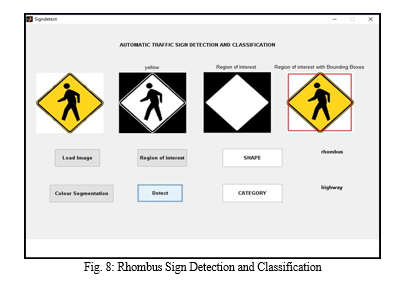
An Automatic Traffic Sign Detection and Classification System have been proposed based upon the four main steps: Image Acquisition, Color Segmentation & ROI Identification, Traffic Sign Shape Detection, Sign Classification
The image is acquired or loaded from the database stored in the system. The loaded image is transformed into Hue, Saturation and Value (HSV) model from Red, Green, and Blue (RGB) model for the segmentation of the image. Connected components labelling is applied to the segmented image to identify Region of Interest. Size filtering helps to remove the inappropriate sized objects
The shape of the Traffic Sign is identified by applying shape detection method. The traffic sing is classified according to the detected color and the shape.
Conclusion
The traffic sign recognition system which helps in detecting and classifying the signs has been implemented. Algorithms were developed to segment the image by using colors and to recognize the sign by color-shape combinations as a priori knowledge. This segmentation algorithm helps to mark the traffic sign as an ROI. Image segmentation appears to be most critical task because of the illumination conditions due to highlight invariant color segmentation algorithm has been developed. The algorithm helps to achieve color segmentation under wide range of weather, sign and image conditions. Size filtering of the objects also reduce the number of objects present in the image which could be unnecessary information which can waste the recognition time. Thus, the response time of the system can be improved. Algorithm for the shape detection deals only with the ROIs for detecting the shape. Then based on the detected shape and color the traffic sign has been classified correctly.
References
[1] C.Fang, S.Chen, and C.Fuh, “A Road-Sign Recognition System Based on Dynamic Visual Model”, IEEE Transaction 2003. [2] F.P.Paulo, L.P.Correia, “Automatic Detection and Classification of Traffic Signs”, Image Analysis for Multimedia Interactive Services, pp 6-8, IEEE June 2007. [3] https://courses.cs.washington.edu/courses/cse576/book/ch10.pdf [4] http://homepages.inf.ed.ac.uk/rbf/CVonline/LOCAL_COPIES/OWENS/LECT5/node 2.html [5] https://www.cs.auckland.ac.nz/courses/compsci773s1c/lectures/ImageProcessing- html/topic3.htm [6] http://www.eie.polyu.edu.hk/~enyhchan/imagee.pdf [7] http://www.rms.nsw.gov.au/roads/safety-rules/road-rules/signs.html [8] http://www.safetysign.com/road-symbol-signs [9] http://www.streetsignpictures.com/trafficsignpictures.html [10] M.Shadeed, D.Abu-Al-Nadi, and M.Mismar, “Road Traffic Sign Detection in Color Images”, IEEE Transaction 2003. [11] N.Yabuki, Y.Matsuda, Y.Fukui, and S.Miki, “Region Detection using Color Similarity”, IEEE 1999. [12] S.Laufernte-Arroyo, P.Gil-Jimenez, R.Maldanado-Bascon, F.Lopez-Ferreras and S.Maldonado-Bascon, “Traffic Sign Classification Evaluation I: SVM using distance to Boarders”, pp 557-562, IEEE September 2005. [13] Siti Sarah Md Sallah, Fawnizu Azmadi Hussin, Mohd zuki Yusoff, “Shape Based Road Sign Detection and Recognition for Embedded Application using MATLAB”, International Conference on Intelligent and Advanced Systems 2010, Kuala Lumpur. [14] Tang Jin, Liang Xiong, “A Method for Traffic Signs Detection, Tracking and Recognition”, IEEE August 24-27 2010. [15] Yanlei Gu, Tomohiro Yendo, Mehrdad Panahpour Tehrani, Toshiakin Fujii, Masayuki Tanimato, “A New Vision System for Traffic Sign Recognition”, pp 7- 12,IEEE June 2010
Copyright
Copyright © 2023 P. Madhuri, G. Madhavi. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET54187
Publish Date : 2023-06-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online