

Ijraset Journal For Research in Applied Science and Engineering Technology
A Review on Autonomous Delivery Robot using Machine Learning
Authors: Nisarga U, Prajwal R, Reshma S M, Sonu H, Ms. Ramya B
DOI Link: https://doi.org/10.22214/ijraset.2022.43826
Certificate: View Certificate
Abstract
The area of autonomous robotics is developing at a fast rate. The fashion to apply more and more sensors in automobiles is pushed each through rules and client needs for better protection and dependable service. Nowadays, robots are located everywhere, starting from homes, hospitals to industries, and navy operations. Autonomous robots are evolved to be strong sufficient to work beside people and to perform jobs efficiently. Humans have a natural experience of information of the physical forces appearing round them like gravity, experience of motion, etc. which aren\'t taught explicitly however these evolved naturally. However, this isn\'t always the case with robots. To make the robot completely autonomous and equipped to work with people, the robotic have to be capable of understand the scenario and devise a plan for easy operation, considering all the adversities which can arise even as sporting out the tasks. Considering the modern covid-19 scenario, we\'ve got proposed a prototype robotic that may be very beneficial to reduce the danger of infectious sickness transmission in the product delivery machine during the extreme stress on healthcare and hygiene. The layout and development of a price effective autonomous cellular robotic prototype were supplied which can supply applications accurately to a favoured vacation spot using Radio frequency identification (RFID).
Introduction
I. INTRODUCTION
In this modern era, with organizations booming we see a fast boom in companies whether it be a comparison financially or in ground strength. For an organization to work correctly it's been again and again located that multiple employees are used for piteous jobs including transferring files to numerous departments or shipping of letters or posts. So, offering an autonomous robot capable to send or get hold of bodily items, in some of different scenarios. Autonomous shipping system, now no longer but smart sufficient to supply items throughout cities, however capable of supply small items from one area to any other in small boundaries. The use of Raspberry Pi represents the robot, open source platform, in order to be powered via way of means of the Raspberry Pi and Pi Camera to create an autonomous vehicle. The shipping robotic is educated meticulously with aid of Open CV which is a part of library to permit run simulations and may be used to teach or create autopilots or models. Thus, permitting the automobile to control itself via way of means of the judgment bestowed upon it via rigorous training. The more used and best example for autonomous robot is self-driving car. Self- driving cars are one of the most talked about technologies in the modern world. What was once thought to be true now. Definition A self-driving motor that ensures to take a traveler to its destination with minimal human control while taking protection as the first priority. Many groups at some point in the industry are creating extreme and endless attempts to implement a secure and harmless process and have begun to develop similar prototypes. Among those teams are Google, Tesla Mercedes and many others who have built an effective and efficient prototype and are planning to launch the version in the coming years. The engines they use are predicted to have faster intelligence than humans, to make reliable decisions, thus avoiding many mistakes that cause damage in the first place. In addition to saving significant lives, the various advantages that the technology offers are over-the-top traffic control because unlike humans these vehicles meet appropriate traffic rules, making riding easier and less congested. Self- driving cars can also help to address parking problems with the help of a permit to build a taxi / carrier for assembly of unused engines and with the help of an unused vehicle we suggest a car that lasts a few hours. While the owner is at work or the car is in the garage while the owner is out on vacation. So we should make the most of the land instead of the parking lot. The simplest version of any Autopilot system includes a radar, a front-facing camera, a digital- controlled brake machine, and long ultrasonic sensors mounted on the Robot. Radar allows for the detection of robots and various transmissions around the vehicle, a front-facing camera that helps to detect and capture objects such as vehicles, trees, driving route, people, site visitor alerts and important separate data. All of those statistics are taken in real-time and are directly integrated into the study community that predicts vehicle response accordingly.
II. AUTONOMOUS ROBOT SYSTEM
The standard high-level structure of the proposed navigation system incorporates an RFID discussion module, furthering a software program that appears to be processed realistically and integrates important management actions. RFID is an automated
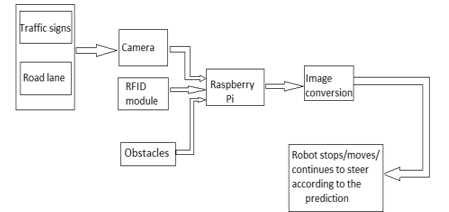
diagnostic method that relies on data storage and retrieval using data handling devices called RFID tags. The proposed method is named after the RFID tags found in the three D area so that the clues that link to its speculation on the ground fully explain the preferred free-to-navigate robot. The location of the tags is unknown to the robot. The robot is pre-programmed with a list of tags that identify the preferred method. For example, if a robot is given a list A, B, C, D, it means that it is intended to roam to the nearest available location to tag ID D, and then to rotate in a straight line to the nearest location. it can detect the identification of ID A, and then to mark B, and then mark ID D. During roaming, the robot continuously reads the IDs of all internal tags in order to reach but will only process a signal from the local marker at that time. Linking to tags is done by the RFID reader by detecting the sticks in the robot. Advanced settings are set to this gadget with RFID tags. In this setting, the
robot prefers the path which is the fastest line between the tags and takes the shortest route.
III.LITERATURE REVIEW
Aditi Shinde et.al [1] The paper suggested how to allow the robot to roam the interior is shown. The system uses RFID tags as location markers to detect a robot. A topological map similar to the actual location is used for robot navigation. The robot is moving along the roads, and it is turning in the right direction at all intersections in the corridors. A robotic navigation device can be used in real life and perform effective tasks.
Tej kurani et.al [2] The basic concept proposed in this paper is to develop an self-driving vehicle which is capable of analysing its surroundings and pass without any external human intervention. This automation is carried out by identifying the road, alerting about the approaching obstacles, stop signs, responding and making decisions, which include changing the direction route of the vehicle and the vehicle is capable of identifying green signals with the help of Neural Network. Autonomous vehicle analysis the input, tracks the path and sends commands to the actuators that manage acceleration, braking, and steering. The software program tracks traffic with the aid of hard- coded regulations, preventive algorithms, predictive modeling, and "smart" discrimination on objects, assisting the software program to act in accordance with traffic regulations.
Hema C et.al [3] This project proposes a model of self driving vehicle which is capable of driving from one place to any other place. It makes use of camera to take the photographs from actual world things ,later it sends it to the convolutional neural network through raspberry pi and arduino makes a decision any of the direction to steer the car and reaches the destination. This project includes the usage of picture processing concept, a the front facing cameras, where in which the camera will seize the pictures from the actual world .it uses ultrasonic sensors to detect the obstacles, it uses convolutional neural network, arduino microcontrollers. Lane detection, and pothole detection animal detection is also performed on this paper.
Raj Shirolkar et.al [4] The product of cease is a standard version of the mobile car that travels in a limited way using web-based controls and voice commands. In this system, roadmap plans are determined with the help of the Raspberry Pi controller which makes important decisions such as choosing the right route and looking for obstacles if any. Additionally, the car uses a microphone to control additional voice and sensors to help increase accuracy in detecting obstacles. Initially, the route is awaited and then passed to find the shortest route between the starting point and the stopping point. This prototype reveals additional records about vehicle control from video streaming that assists in traffic flow.
Duc Lich Luu et.al [5] The paper is about the development and use of autonomous vehicles during a set of vehicles commonly called Platoon. This car is planned to be driven in a series of different private cars and with the use of this functionality has increased. They also developed various algorithms to help control the quality of autonomous vehicles. The device was specially designed to prevent collisions in the right way and in addition helped to maintain a decent distance between the various vehicles made using distance sensors. Various types of sensors were used in this image .The machine operated as a line following a robot and with the help of a speed sensor the vehicle's speed was controlled.
Aditya Kumar Jain [6] The performance model of a reliable vehicle was tested and evaluated under various track conditions such as curved track, line tracks and a combination of two-way. In particular, the Pi cam collects data from its surroundings and is then integrated into the Conventional neural algorithm. Counted information is provided to Arduino to make appropriate conclusions. The corresponding indicators are active and this contributes to the movement of the vehicle. The performance model has had a number of significant issues in dealing with curves.The simultaneous movement of a car as it moves to a curved surface has turned out to be unexpected. In a few cases it was easily swept away and in a few other cases the car skidded off the road which is very dangerous in the real- time system. Provide them with an independent car development process using Digital Image.
Sean Campbell et.al [7] This paper will review the key sensory technologies used to create autonomous vehicles. Sensors are an important part of all autonomous vehicles because they can provide the information needed to understand the environment and thus aid the decision- making process. The sensors are there to create both visual and local space so that the car can make choices in real time. In this way it needs to quickly and accurately produce a high-quality understanding of where the vehicle is, in order to be able to transfer data alongside managing algorithms. There are important types of sensors used inside the car that represent:. Exteroceptive Sensors - LiDAR, Radar, Camera and Proprioceptive-GPS Sensors, IMU (Inertial Measurement Unit), Coders.
V.Keerthana et.al [8] The foremost goal after using the avoidance method is to find a non-collision route from the first line to the goal in the monitoring areas. The robot's ability to detect a path, detect obstacles, and navigate close to one another to avoid collisions. It also shows that the robot was successfully following very tight curves and blocking any obstacles that appeared in its path. An action plan that allows the robot to reach its goal without colliding with any possible obstacles in its path. To avoid collisions in the portable robot area, provide route-generating & line- based techniques. Line tracking, route planning, collision avoidance, back spread, improved memory, long-distance obstacles. It is cheaper and less expensive than before. Also work with back propagation technique.
Jamel Baili et.al [9] This paper mainly deals with image processing strategies to locate lane boundary strains. Video sensors represent a remarkable innovation within automation sector and traffic safety , as they make a contribution to the event of driver help systems.. These video structures use image processing strategies to alert the drivers about approaching dangers. Analogous improvement is the Lane Departure Warning System(LDWS) which play a vital function in avoidance from accidents. The major feature of this device is the detection of lane boundary strains by the use of artificial vision.
M. Naveenkumar et.al[10] The purpose of image processing is to help the computer capture the information contained in that image. OpenCV is a library of editing skills used specifically for image processing. OpenCV integrates a variety of computer problem solving tools. Includes low- resolution image processing features and advanced face recognition algorithms, feature matching and tracking. Other key image processing techniques are image filtering, image tracking, feature detection
Conclusion
In this paper, we have provided a set of robotic navigation rules using RFID technology. A set of rules is developed to have a clear ability to direct the robot to use any RFID tag with simple intelligent processing with the difference of the signal class sent by the marker and the detection of each RFID reader connected to the robot. The proposed set of rules proves to be very reassuring in following the rectilinear-selected tracking of various problems described with the help of the use of multiple RFID tags located in unknown places in the area. The results are based entirely on computer simulations, the RFID version used within the simulations is based on real-world information taken from the real RFID gadget. , and modular in the sense that they are independent of any particular robotic architecture. Having said that, it is important to point out the fact that this approach should not always replace vision-based roaming algorithms. Although the proposed algorithm has been used here for mobile robotic navigation, it can be easily expanded even in unmanned vehicles. It may also be important to extend the power of the proposed navigation system to track curvilinear and circular lines.
References
[1] Aditi Shinde, Toshita Nehete, Bipasa Patra , “Robot Navigation System with RFID and Sensors” , International Research Journal of Engineering and Technology (IRJET)2021 [2] Tej kurani, Nidhip kathiriya ,Uday Mistry, Proff.Lukesh Kadu ,Proff. Harish Motekar, \"Self driving Car using Machine Learning\", International Journal of Engineering Research & Technology (IJERT) , 2020. [3] Hema C, Moksha S, Impana B, Nithin S, Pavana S , \" Self –Driving Car Using Raspberry Pi,Convolutional Neural Network Arduino Microcontroller\", International Journal of Engineering Research & Technology (IJERT), 2020. [4] Raj Shirolkar , Rohan Datar , Anushka Dhongade Gayatri Behere \"Self –Driving Autonomous Car using Raspberry Pi \" , International Journal of Engineering Research & Technology (IJERT) - ISSN:2278-0181 , 2015. [5] Duc Lich Luu, Ciprian Lupu , Doinita Chirita , \"Design and Development of Smart Cars Model for Autonomous Vehicles in a Platooning\" , 15th International Conference on Engineering of Modern Electric Systems(EMES) , 2019. [6] Aditya Kumar Jain \"Working model of Self-driving car using Convolutional Neural Network, Raspberry Pi and Arduino\" IEEE Xplore ISBN:978-1-5386-0965-1 , 2018. [7] Sean Campbell, Niall O’ Mahony, Lenka Krpalcova, Daniel Riordan, Joseph Walsh , \"Sensor Technology in Autonomous Vehicles\", IEEE – 978-1-5386-6046-1 , 2018. [8] V.Keerthana , C.Kiruthiga , P.Kiruthika , V.Sowmiya, R.Manikadan \"Navigation of Mobile Robot-Algorithm for Path Planning and Collision Avoidance\", International Journal of Research-Granthaalayh,2017. [9] Jamel Baili, Mehrez Marzougui, Samer Lahouar ,M.Hergli , \"Lane Departure detection using image processing techniques\" , IEEE-978-1-5090-5814-3 , 2017.Trends [10] M. Naveenkumar , A. Vadivel , \" OpenCV for Computer Vision Applications\", proceedings of national conference on big data and cloud computing (NCBDC’15) , 2017.
Copyright
Copyright © 2022 Nisarga U, Prajwal R, Reshma S M, Sonu H, Ms. Ramya B. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43826
Publish Date : 2022-06-04
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online