

Ijraset Journal For Research in Applied Science and Engineering Technology
Autonomous UAV Swarms: Powering Up with AI
Authors: Onasvee Banarse, Harsh Shah, Kaustubh Kabra
DOI Link: https://doi.org/10.22214/ijraset.2023.54336
Certificate: View Certificate
Abstract
This study offers a thorough analysis of autonomous UAV swarming, focusing on its merits, important technologies, applications, difficulties, and prospects for the future. The idea of autonomous UAV swarming entails the coordination and decentralised cooperation of several UAVs to accomplish common objectives. The foundations of UAV swarming are thoroughly covered, including its essential ideas, advantages, architectures, and swarm behaviour. We emphasise the role of artificial intelligence (AI), more especially reinforcement learning (RL) and particle swarm optimisation (PSO), in promoting thoughtful decision-making, task allocation, and coordination within UAV swarms. The study examines the many uses of autonomous UAV swarming in fields including infrastructure inspection, search and rescue, agriculture, and disaster response. It also discusses UAV swarming\'s difficulties and restrictions, such as scalability, communication, fault tolerance, and ethical issues. In addition to standardisation initiatives, the study suggests future research possibilities for swarm intelligence, edge computing, cognitive capacities, and human swarm interaction.
Introduction
I. INTRODUCTION
In recent years, there has been a remarkable surge of interest and advancement in the field of unmanned aerial vehicles (UAVs) and their applications. One particularly intriguing area of research within this domain is the concept of autonomous UAV swarming. This paper aims to explore the current situation, background, and motivation behind the development of UAV swarms, while providing a clear definition of this emerging technology.
The current situation in the realm of UAV swarms showcases a growing trend towards the utilization of multiple unmanned aerial vehicles operating in a coordinated and intelligent manner. With advancements in miniaturization, sensor technology, and communication systems, researchers and practitioners have started to explore the potential of using a group of UAVs working together as a cohesive unit to achieve various objectives. This paradigm shift from individual UAV operations to swarming presents a new set of challenges and opportunities that need to be thoroughly investigated.
To understand the motivation behind the development of UAV swarms, it is essential to recognize the limitations of traditional single UAV operations. While a single UAV can perform tasks efficiently, it is often constrained by factors such as limited sensing capabilities, endurance, and information processing capacity. By leveraging the power of swarming, multiple UAVs can combine their strengths, compensate for individual weaknesses, and accomplish complex missions that would otherwise be difficult or even impossible to achieve.
The background of UAV swarms can be traced back to the concept of swarm intelligence, inspired by the collective behaviour observed in natural systems such as bird flocks, fish schools, and insect colonies. Researchers have sought to replicate and harness the principles of self-organization, decentralized control, and emergent behaviour exhibited by these natural swarms. By adopting similar principles in the context of UAVs, it becomes possible to achieve robustness, adaptability, scalability, and fault tolerance in autonomous systems.
Defining UAV swarms, it refers to the coordinated and decentralized control of a group of autonomous UAVs, working together towards a common objective. These swarms typically operate by dynamically adapting their formation, sharing information, and collaborating to accomplish tasks efficiently. Individual UAVs in a swarm may communicate with each other, exchange data, and coordinate their actions, leading to emergent behaviours and enhanced capabilities beyond what a single UAV can achieve.
II. FUNDAMENTALS
A. Swarming Concepts and Definitions
Swarming in the context of unmanned aerial vehicles (UAVs) refers to the coordinated behaviour of a group of autonomous drones that work together as a cohesive unit. It draws inspiration from the collective behaviour observed in natural swarms such as flocks of birds or schools of fish. In UAV swarming, individual drones communicate and cooperate with each other using predefined rules and algorithms to achieve common goals. These goals can include tasks like surveillance, search and rescue operations, environmental monitoring, or even military applications.
B. Advantages and Benefits of UAV Swarming
UAV swarming offers several advantages and benefits over traditional single-drone operations. Firstly, swarming enables enhanced operational capabilities through the pooling of resources and distributed processing. By working together, a swarm of UAVs can cover larger areas, gather more data, and perform tasks more efficiently than a single drone. Additionally, swarming allows for increased redundancy and fault tolerance. If one drone in the swarm malfunctions or is taken out, the others can continue the mission without interruption. Swarming also provides increased adaptability and flexibility, as the swarm can dynamically adjust its behaviour and formation based on the mission requirements or environmental conditions.
C. Swarming Architectures and Communication Models
Swarming architectures define the organizational structure and coordination mechanisms employed by UAV swarms. There are several architectural models, including centralized, decentralized, and fully distributed. In a centralized architecture, a central controller or leader drone coordinates the actions of the entire swarm. Decentralized architectures distribute decision-making among the drones, with each drone making its own local decisions based on local information and limited communication with neighbouring drones. Fully distributed architectures enable each drone in the swarm to communicate and cooperate with all other drones directly. Communication models in UAV swarming can range from simple message passing to more complex approaches like neighbour-based information exchange or virtual pheromone trails.
Communication is essential for information sharing, coordination, and maintaining swarm coherence.
D. Formation Control and Swarm Behaviour
Formation control involves regulating the relative positions and movements of drones within a swarm to achieve desired spatial arrangements. Different formation patterns can be utilized depending on the mission requirements, such as line formations, circular formations, or grid formations. Formation control algorithms typically consider factors like inter-drone distances, relative velocities, and collision avoidance to ensure safe and efficient operation. Swarm behaviour refers to the emergent collective behaviour exhibited by a group of UAVs. Through local interactions and coordination, the swarm can exhibit complex behaviours such as self-organization, pattern formation, and adaptive response to changing conditions. Swarm behaviour is influenced by various factors, including the communication protocols, individual drone capabilities, environmental stimuli, and the overall mission objectives.
III. TECHNOLOGY
A. UAV Autonomy and Intelligent Decision-Making
UAV autonomy plays a critical role in enabling autonomous UAV swarming. Advancements in onboard sensors, perception algorithms, and intelligent decision-making algorithms allow UAVs to operate autonomously, make real-time decisions, and adapt their behaviour to changing environments. By integrating artificial intelligence (AI) techniques such as machine learning and computer vision, UAVs can perceive their surroundings, analyse the collected data, and make intelligent decisions regarding their movements, task execution, and interactions with other members of the swarm.
B. Communication and Networking Protocols
Communication is vital for coordinating the actions of UAV swarms. Communication protocols and networking technologies enable UAVs to exchange information, share their states, and coordinate their behaviour. The development of efficient communication protocols that can handle the large-scale and dynamic nature of swarm systems is crucial. These protocols should ensure reliable, low-latency communication, allow for adaptive networking strategies, and handle issues such as interference and limited bandwidth. Additionally, secure communication protocols are necessary to protect the integrity and privacy of swarm communications.
C. Cooperative Localization and Navigation
Cooperative localization and navigation techniques enable UAVs in a swarm to establish their positions relative to each other and their environment accurately. This information is crucial for maintaining formation, avoiding collisions, and performing collaborative tasks. Techniques such as cooperative localization, where UAVs share sensor measurements and perform collaborative estimation, and cooperative navigation, where UAVs exchange their planned trajectories and coordinate their movements, are essential for achieving accurate and synchronized swarm behaviour. These technologies often rely on sensor fusion, simultaneous localization and mapping (SLAM), and distributed localization algorithms.
D. Collision Avoidance and Safety Mechanisms
To ensure safe and reliable operation, autonomous UAV swarms require collision avoidance and safety mechanisms. UAVs need to detect and avoid potential collisions with other UAVs, obstacles, or manned aircraft. Collision avoidance technologies can include onboard sensors (e.g., cameras, LiDAR, radar), collision prediction algorithms, and reactive control strategies. These mechanisms aim to ensure safe separation distances, maintain clear airspace, and enable cooperative collision avoidance among the swarm members. Safety features, such as fail-safe behaviours, emergency landing procedures, and fault detection mechanisms, are also essential to mitigate risks and ensure the overall safety of the swarm.
E. Task Allocation and Swarm Optimization
Task allocation and swarm optimization techniques determine how tasks are assigned to individual UAVs within the swarm to maximize overall performance and efficiency. These technologies optimize the allocation of tasks based on factors such as UAV capabilities, task requirements, communication constraints, energy efficiency, and mission objectives. Swarm optimization algorithms, such as ant colony optimization, particle swarm optimization, or genetic algorithms, can be employed to find optimal task assignments and resource allocations within the swarm. These technologies enable efficient utilization of swarm resources, improve task completion time, and enhance overall swarm productivity.
Advancements in these key technologies are crucial for the successful implementation and operation of autonomous UAV swarming systems. Continued research and development in UAV autonomy, communication protocols, cooperative localization and navigation, collision avoidance, and task allocation optimization will contribute to the advancement and effectiveness of autonomous UAV swarming in various applications.
IV. IMPACT OF ARTIFICIAL INTELLIGENCE
AI plays a critical role in enabling autonomous UAV swarms by providing advanced perception and situational awareness. Through computer vision and sensor fusion techniques, AI algorithms analyse real-time data from onboard sensors and cameras, allowing the swarm to perceive its environment accurately. ML algorithms can then learn from this data to recognize and classify objects, identify potential threats, and navigate complex environments effectively.
Furthermore, AI enables intelligent decision-making within the UAV swarm. By leveraging ML techniques, the swarm can learn from past experiences, adapt to changing conditions, and optimize its behaviour for mission success. AI algorithms can analyse vast amounts of data to identify patterns, predict outcomes, and make informed decisions in real-time. This capability is particularly valuable when dealing with dynamic and unpredictable scenarios, such as search and rescue missions or disaster response operations. Additionally, AI and ML contribute to the coordination and collaboration among UAVs within the swarm. Through decentralized control algorithms, UAVs can communicate and share information, enabling them to work together seamlessly. AI algorithms can optimize task allocation, path planning, and formation control, ensuring efficient and synchronized actions among the swarm members.
A. Reinforcement Learning (RL):
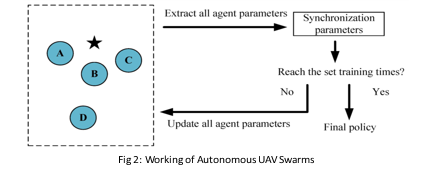
Reinforcement Learning (RL) plays a crucial role in shaping the behaviour of autonomous UAV swarms by enabling them to learn and adapt their actions based on feedback from the environment. RL provides a framework for individual UAVs within the swarm to make decisions that maximize cumulative rewards while accomplishing assigned tasks. Through RL, UAVs interact with the environment, take actions, and receive feedback in the form of rewards or penalties based on the outcomes of their actions. This feedback allows UAVs to learn which actions are advantageous and which ones to avoid. Over time, they acquire optimal policies that guide their decision-making processes.
RL has been successfully applied to various aspects of autonomous UAV swarming. For instance, RL algorithms have been utilized for efficient path planning, enabling UAVs to navigate complex environments by discovering optimal paths that minimize energy consumption or maximize exploration coverage [1]. RL also facilitates resource allocation optimization, enabling UAVs to distribute resources effectively based on mission requirements, as fuel efficiency or workload balancing [2]. Moreover, RL is valuable for swarm coordination and collaboration.
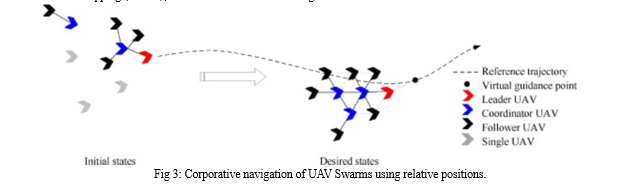
UAVs learn to communicate and cooperate with each other to achieve shared objectives. For example, RL algorithms have been employed to enable UAVs learn and maintain desired formations and behaviours for specific tasks, ensuring efficient collaboration and synchronized actions within the swarm [3]. The adaptive nature of RL allows UAV swarms to handle dynamic and uncertain environments effectively. UAVs continuously learn and improve their decision-making abilities, enabling them to adapt their strategies in real-time and handle novel situations [4].
RL plays a pivotal role in shaping autonomous UAV swarms by facilitating learning, adaptation, and intelligent decision-making based on environmental feedback. By leveraging RL algorithms, UAV swarms can optimize their behaviour for various tasks, achieve efficient resource allocation, and enhance collaboration among swarm members.
B. Particle Swarm Optimization (PSO)
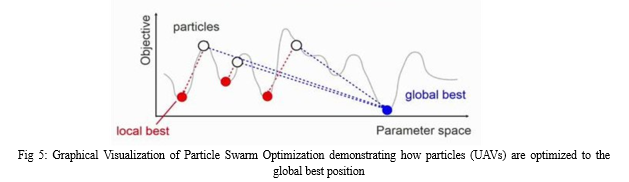
Particle Swarm Optimization (PSO) algorithm is a powerful optimization technique that can be employed in autonomous UAV swarms to enhance their coordination, task allocation, and overall performance. PSO is inspired by the collective behaviour of bird flocks or fish schools, where individual entities (particles) in the swarm cooperate and adjust their positions based on the knowledge gained from their own experiences and the experiences of the best-performing entities in the swarm. PSO enables UAV swarms to optimize the distribution of tasks and resources, maximizing overall performance and minimizing the time or cost required to complete missions.
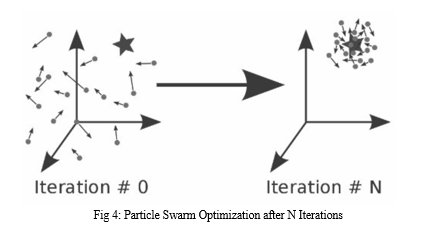
PSO operates by simulating a population of particles, each representing a potential solution or a UAV in the swarm. The particles move through the search space, adjusting their position and velocity based on their own experience and the information obtained from other particles in the swarm. The objective is to find the optimal solution or task allocation that best satisfies predefined criteria, such as minimizing energy consumption or maximizing mission coverage. In the context of UAV swarms, PSO has been applied to various aspects of swarm coordination and task allocation. For example, research by [5] demonstrated the use of PSO in optimizing the distribution of surveillance tasks among UAVs in a swarm. The study showed that PSO-based task allocation resulted in improved coverage and reduced redundancy compared to traditional methods.
During the optimization process, particles in the swarm explore the search space by updating their positions and velocities based on their own previous experiences and the best-performing particles (solutions) found so far. Through iterations, the particles converge towards an optimal solution that satisfies the objectives and constraints of the task allocation problem. The optimal solution represents an efficient assignment of tasks to UAVs, considering factors such as task complexity, UAV capabilities, and resource constraints.
Additionally, PSO has been utilized for path planning in UAV swarms. Research conducted by [6] proposed a PSO-based approach for optimizing the flight paths of UAVs in a swarm during search and rescue operations. The study showed that the PSO algorithm effectively generated optimal paths, minimizing search time and maximizing the probability of finding targets.
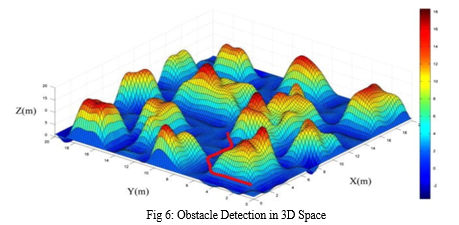
C. Potential Field Algorithm
The Potential Field algorithm is a widely used approach in autonomous UAV swarms for navigation and obstacle avoidance. It is based on the concept of simulating attractive and repulsive forces in the environment to guide the UAVs towards their goal while avoiding obstacles. In the Potential Field algorithm, the environment is represented as a virtual field, where attractive forces pull the UAVs towards the goal location and repulsive forces push them away from obstacles. Each UAV calculates its desired direction based on the combined effects of these forces.
The attractive force directs the UAV towards the goal by creating a gradient towards the target location. The strength of this force is typically inversely proportional to the distance between the UAV and the goal, causing the UAV to move faster when farther away and slowing down as it gets closer. The repulsive force is generated by obstacles detected by sensors onboard the UAV. The strength of the repulsive force is usually inversely proportional to the distance between the UAV and the obstacle, with stronger forces pushing the UAV away from closer obstacles. This mechanism allows the UAV to avoid collisions with static or moving obstacles in its path. To calculate the resultant force, the attractive and repulsive forces are combined vectorially. The UAV then adjusts its heading and velocity based on the resultant force, allowing it to navigate towards the goal while avoiding obstacles. One study by [7] proposed a PFA-based approach for achieving formation control in UAV swarms. The algorithm utilized attractive and repulsive potentials to enable UAVs to maintain desired inter-UAV distances and formations during flight.
The Potential Field algorithm offers several advantages for autonomous UAV swarms. It is computationally efficient and can handle real-time obstacle avoidance. The decentralized nature of the algorithm allows each UAV to make independent decisions based on its local perception of the environment, enabling efficient swarm coordination without centralized control. Another research paper by [8] presented an improved version of the PFA for path planning in UAV swarms. The paper introduced a dynamic potential field model that accounted for UAV velocity and target priority, allowing for efficient and flexible path planning in complex environments.
The impact of AI on autonomous UAV swarms is significant. AI and ML enable UAV swarms to perceive their environment, make intelligent decisions, and coordinate their actions effectively. By leveraging the power of AI, autonomous UAV swarms have the potential to enhance capabilities in various domains, including surveillance, reconnaissance, delivery, and disaster response. As AI and ML technologies continue to advance, the potential for further improvements and applications in autonomous UAV swarms is vast, promising a future with increasingly intelligent and efficient swarm systems.
V. APPLICATIONS
A. Surveillance and Reconnaissance:
Autonomous UAV swarming has significant applications in surveillance and reconnaissance activities. By leveraging a swarm of UAVs, it becomes possible to cover a larger area, gather more data, and perform complex surveillance tasks efficiently. The swarm can be programmed to fly in a coordinated manner, collect real-time video footage, capture images, and relay information back to the control centre. This capability is particularly useful in military operations, border surveillance, law enforcement activities, and monitoring critical infrastructure.
B. Search and Rescue Operations:
In search and rescue missions, time is of the essence. UAV swarming can greatly enhance the effectiveness of these operations by rapidly covering large search areas and locating individuals in need of assistance. Swarms of autonomous UAVs equipped with cameras, thermal sensors, and other detection technologies can systematically scan an area, identify potential targets, and relay their precise locations to the search and rescue teams. This can help save lives in various scenarios, including natural disasters, wilderness search operations, and urban rescue missions.
C. Precision Agriculture and Environmental Monitoring
Autonomous UAV swarms offer valuable applications in precision agriculture and environmental monitoring. With advanced sensors and imaging systems, these swarms can gather data on crop health, soil conditions, water usage, and pest infestations. By flying in coordinated patterns, they can efficiently cover large agricultural fields and provide farmers with real-time information for optimizing crop yields, reducing resource waste, and implementing targeted interventions. In environmental monitoring, UAV swarms can monitor wildlife populations, track changes in habitats, detect pollution sources, and assess the health of ecosystems.
D. Disaster Response and Humanitarian Aid
During disaster response and humanitarian aid efforts, autonomous UAV swarms can provide critical support in assessing damage, mapping affected areas, and delivering essential supplies. The swarms can quickly survey disaster zones, create high-resolution maps, and identify areas that need immediate attention. They can also transport medical supplies, food, water, and other necessities to remote or inaccessible locations. UAV swarms equipped with communication systems can establish temporary communication networks in disaster-stricken areas, aiding in coordination and facilitating rescue operations.
E. Infrastructure Inspection and Maintenance
Inspecting and maintaining large-scale infrastructure, such as bridges, power lines, and pipelines, can be time-consuming, costly, and potentially dangerous. Autonomous UAV swarms can streamline these tasks by autonomously inspecting infrastructure, identifying structural weaknesses, and detecting maintenance needs. Equipped with cameras, sensors, and data analysis capabilities, the swarm can capture detailed visual information, conduct thermal imaging, and monitor infrastructure conditions in real-time. This proactive approach to inspection and maintenance improves efficiency, reduces costs, and enhances overall safety.
VI. CHALLENGES
A. Scalability and Coordination Complexity:
Scalability refers to the ability of a swarm to handle an increasing number of UAVs without sacrificing performance or coordination. As the size of the swarm grows, the complexity of managing interactions and achieving coordinated behaviour becomes more challenging. Coordinating the movements, trajectories, and tasks of numerous UAVs in real-time requires sophisticated algorithms and communication protocols.
These algorithms must ensure that UAVs avoid collisions, maintain appropriate spacing, and execute tasks efficiently. Achieving scalability in autonomous UAV swarming requires designing distributed control systems that can handle the increasing computational and communication demands as the swarm size grows.
B. Communication Bandwidth and Interference:
Communication is essential for the coordination and collaboration of UAV swarms. However, limited communication bandwidth can become a bottleneck when dealing with many UAVs. Each UAV needs to exchange information with other members of the swarm, such as position, velocity, and task-related data. As the number of UAVs increases, the available bandwidth may become overwhelmed, leading to delays, data loss, or communication failures.
Moreover, in environments with high levels of radio frequency interference or in areas with limited connectivity, maintaining reliable and uninterrupted communication between UAVs can be a significant challenge. To address these limitations, researchers are exploring efficient communication protocols, adaptive networking strategies, and advanced techniques such as distributed data fusion to optimize the use of available bandwidth.
C. Fault Tolerance and Robustness:
Fault tolerance and robustness are crucial aspects of autonomous UAV swarms. In a swarm, each UAV operates autonomously, and individual UAV failures or malfunctions should not disrupt the entire swarm's operation. Designing fault-tolerant systems that can adapt to individual UAV failures, redistribute tasks among the remaining UAVs, and maintain swarm integrity is a complex problem. This requires redundancy in swarm architecture, the ability to detect and diagnose failures, and mechanisms to dynamically adjust swarm behaviour.
Techniques such as self-repairing algorithms, decentralized decision-making, and adaptive task allocation can enhance fault tolerance and robustness in autonomous UAV swarming systems.
D. Ethical and Legal Considerations
The increased use of autonomous UAV swarms raises ethical and legal concerns that need to be addressed. Privacy is a significant issue as UAVs equipped with sensors and cameras can collect vast amounts of data. Safeguards and regulations need to be in place to address data collection, storage, and usage, ensuring compliance with privacy laws and protecting individuals' rights. Additionally, safety concerns arise in densely populated areas or sensitive locations where accidents or unauthorized access to UAV swarms can have severe consequences. Regulations and guidelines should be established to govern the deployment, operation, and control of autonomous UAV swarms to ensure public safety, mitigate risks, and address liability and accountability issues. Ethical considerations such as transparency, accountability, and the responsible use of UAV swarms should also be considered.
E. Integration with Other Technologies (e.g., AI, IoT):
Autonomous UAV swarming can benefit from integration with other technologies, such as artificial intelligence (AI) and the Internet of Things (IoT). AI techniques can enhance the capabilities of UAV swarms by enabling adaptive decision-making, learning from experience, and handling complex and uncertain environments. Machine learning algorithms can be used to improve swarm behaviour, optimize task allocation, and enable autonomous learning and adaptation. IoT technologies can provide real-time data from various sensors and devices, enabling UAV swarms to gather information about the environment, collaborate with other systems, and respond to changing conditions. Integrating UAV swarming with AI and IoT requires seamless communication, data fusion, and interoperability between different systems, creating a unified framework that enhances the overall performance and efficiency of system.
VII. FUTURE SCOPE AND RESEARCH DIRECTION
A. Edge Computing and Decentralized Swarming
Edge computing, which involves processing data near the source instead of relying solely on cloud computing, has the potential to transform the capabilities of autonomous UAV swarms. By enabling decentralized processing and decision-making, edge computing reduces communication latency and bandwidth requirements, making swarms more responsive and resilient. Future research will explore how edge computing can be integrated into swarm architectures, allowing UAVs to perform local computations, share information efficiently, and adapt their behaviour in real-time.
B. Cognitive and Learning Capabilities of Swarm Systems
Cognitive capabilities and learning mechanisms will play a significant role in the future of autonomous UAV swarms. There are areas to explore how UAV swarms can exhibit higher-level cognitive abilities, such as perception, planning, reasoning, and decision-making. Machine learning techniques, including reinforcement learning and deep learning, will be employed to enable UAV swarms to learn from experience, adapt to changing environments, and improve their performance over time. These cognitive and learning capabilities will enhance the autonomy and intelligence of UAV swarms, enabling them to handle complex and dynamic tasks more effectively.
C. Human-Swarm Interaction and User Interfaces
As UAV swarms become more prevalent, research will focus on developing intuitive and effective human-swarm interaction mechanisms and user interfaces. This includes designing interfaces that allow human operators to control and coordinate swarm behaviour easily, monitor and interpret swarm data, and provide high-level instructions to the swarm. Collaboration between humans and UAV swarms will be crucial, and research will explore methods to facilitate seamless communication, trust, and cooperation between human operators and swarms.
D. Standardization and Regulatory Frameworks
The development and deployment of autonomous UAV swarms will require standardization and regulatory frameworks. Future research will focus on defining best practices, protocols, and standards for the design, operation, and control of UAV swarms. These standards will ensure interoperability, safety, and compliance with ethical and legal considerations. Additionally, regulatory frameworks will be developed to address privacy, security, airspace management, and certification requirements for autonomous UAV swarm systems. Collaboration between researchers, industry stakeholders, and regulatory bodies will be necessary to establish these frameworks and ensure the responsible and safe deployment of UAV swarms.
These future perspectives and research directions will shape the development of autonomous UAV swarms, paving the way for more intelligent, efficient, and reliable swarm systems in various applications. The combination of advancements in swarm intelligence, edge computing, cognitive capabilities, human-swarm interaction, and regulatory frameworks will enable the realization of the full potential of UAV swarms in transforming industries and addressing complex challenges.
Conclusion
This research investigates the area of Autonomous UAV Swarms and emphasizes the critical role of AI algorithms in creating their autonomy. UAV swarms can exhibit intelligent decision-making, collaboration, and adaptability by using methods like reinforcement learning, the Potential Field algorithm, and particle swarm optimization. UAV swarms are highly efficient and successful in areas like surveillance, disaster management, search and rescue missions, environmental monitoring, and precision agriculture because to the integration of AI algorithms. By utilizing dispersed capabilities and collective intelligence, they provide a number of benefits over individual UAVs or conventional human-operated systems. Despite challenges in communication, coordination, obstacle avoidance, and resource management, this research paper emphasizes the positive impact of AI algorithms on autonomous UAV swarms. These algorithms help them be adaptable, make wise decisions, and optimize their behaviour. The potential for autonomous UAV swarms is enormous in the future. It is anticipated that improvements in hardware, software, and sensors will produce UAV swarms that are even more advanced and powerful. Their capabilities will need to be improved, and their applications will need to be broadened, through ongoing research and interdisciplinary cooperation. UAV swarm autonomy is greatly shaped by AI algorithms, allowing for intelligent and effective operation. This study also emphasizes the importance of AI in enabling collective intelligence and adaptability in autonomous UAV swarms, which results in their wide-ranging applications. Autonomous UAV swarms are poised to revolutionize industries and aid in the resolution of challenging issues in a variety of disciplines as technology develops.
References
[1] Z. Hu, K. Wan, X. Gao, Y. Zhai, and Q. Wang, “Deep Reinforcement Learning Approach with Multiple Experience Pools for UAV’s Autonomous Motion Planning in Complex Unknown Environments,” Sensors, vol. 20, no. 7, p. 1890, Mar. 2020, doi: 10.3390/s20071890. [2] T. Liu, T. Zhang, J. Loo and Y. Wang, \"Deep Reinforcement Learning-Based Resource Allocation for UAV-Enabled Federated Edge Learning,\" in Journal of Communications and Information Networks, vol. 8, no. 1, pp. 1-12, March 2023, doi: 10.23919/JCIN.2023.10087243. [3] Sheng, Geyi & Min, Minghui & Xiao, Liang & Liu, Sicong. (2018). Reinforcement Learning-Based Control for Unmanned Aerial Vehicles. Journal of Communications and Information Networks. 3. 39-48. 10.1007/s41650-018-0029-y. [4] Foerster, J., Nardelli, N., Farquhar, G., Afouras, T., Torr, P. H., Kohli, P., & Whiteson, S. (2017, July). Stabilising experience replay for deep multi-agent reinforcement learning. In International conference on machine learning (pp. 1146-1155). PMLR. [5] Y. Yin, Y. Guo, Q. Su, and Z. Wang, “Task Allocation of Multiple Unmanned Aerial Vehicles Based on Deep Transfer Reinforcement Learning,” Drones, vol. 6, no. 8, p. 215, Aug. 2022, doi: 10.3390/drones6080215. [6] R. Mesquita and P. D. Gaspar, \"A Path Planning Optimization Algorithm Based on Particle Swarm Optimization for UAVs for Bird Monitoring and Repelling – Simulation Results,\" 2020 International Conference on Decision Aid Sciences and Application (DASA), Sakheer, Bahrain, 2020, pp. 1144-1148, doi: 10.1109/DASA51403.2020.9317271. [7] F. Liu, H. He, Z. Li, Z. -H. Guan and H. O. Wang, \"Improved potential field method path planning based on genetic algorithm,\" 2020 39th Chinese Control Conference (CCC), Shenyang, China, 2020, pp. 3725-3729, doi: 10.23919/CCC50068.2020.9189655. [8] Zhang, Mengping, Changlin Liu, Ping Wang, Junjie Yu, and Quan Yuan. \"UAV swarm real-time path planning algorithm based on improved artificial potential field method.\" In International Conference on Autonomous Unmanned Systems, pp. 1933-1945. Singapore: Springer Singapore, 2021.
Copyright
Copyright © 2023 Onasvee Banarse, Harsh Shah, Kaustubh Kabra. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET54336
Publish Date : 2023-06-22
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online