

Ijraset Journal For Research in Applied Science and Engineering Technology
Bell Shaped Lift Distribution, Aerodynamic Soaring and Control Surface Dynamics of Birds
Authors: Prantik Dutta, Afeedh Roshan
DOI Link: https://doi.org/10.22214/ijraset.2022.46134
Certificate: View Certificate
Abstract
The optimal aerodynamic traits of the natural flyers have always been a foundation for the designing of bionic drones. In this paper, the aerodynamic soaring capabilities of the albatross and eagle are discussed in detail along with the eagle’s control surface aerodynamics. The bell shaped lift distribution characteristics exhibited by the albatross are also discussed along with its subsequent sub traits such as proverse yaw, wing-tip vortices and so on. The main soaring dynamics discussed are the dynamic soaring exhibited by the albatross and the utilization of thermal updrafts for thermal soaring by the eagle. Apart from these, the different control surfaces and their actuations along with wing morphing techniques are also highlighted. A proper and near perfect manifestation of the traits of natural flyers could be a harbinger to near perpetual modern aircrafts. Aerodynamics and propulsion system are the areas of research that are of concern in this manuscript.
Introduction
I. INTRODUCTION
The flight of the natural flyers is subdivided into two primary parts. The first one is considered as powered flight mode and it comprises of wing flapping and the hovering flight mode. The second one is considered as unpowered flight mode and it comprises of the soaring and gliding [1]. The main purpose of the bird’s wing is similar to its mechanical counterpart (the airplanes), which is lift generation. It is a phenomenon that helps in attaining flight. So before dwelling with aerodynamics and delving deep into it, it is of utmost importance to grasp a basic idea of what actually lift is.
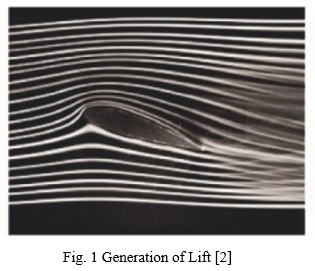
In simple words, lift is nothing but the difference in the magnitude of pressure that exists between both regions of the wing- upper and lower. Lift generation is can be describes as a function of stream tubes of airflow. The airflow that interacts with the leading edge (LE) of the wing, visualize it in the form of stream tubes that on encounter with the LE gets bifurcated into two smaller stream tubes. Now this means that there is a reduction in the cross-sectional area of these subsequent tubes. Now under constant density conditions, i.e. for an incompressible fluid, we can apply the continuity theorem here. The velocity will thus achieve a higher magnitude. Now on applying the Bernoulli’s theorem at this point for an incompressible fluid, we find that this velocity increase will in turn lead to the increase in the magnitude of dynamic pressure as both of the quantities are proportional. What this does is that it leads to a decrease in the magnitude of static pressure. And these further causes a phenomenon referred to as Suction. The static pressure drop is the cause of pressure difference but this varies for a symmetric as well as an asymmetric airfoil. The curvature of a cambered airfoil will yield different cross-sectional areas of the stream tubes for both upper and lower surfaces and hence there exists a pressure difference even at a zero angle of attack (AoA). But in case of a symmetric one, a non-zero AoA is a must [2].
Another important force component is the drag. The drag acting on wings is primarily of three types- form, skin friction and lift induced. Different measures have to be taken in order to counter this necessary evil. The other two important force components of avian flight are thrust and weight.
II. LITERATURE REVIEW
A. Bell Shaped Lift Distribution
To get a grasp of an albatross’s efficient aerodynamic soaring capabilities, it is necessary to understand the concept of a Bell Shaped Lift Distribution (BSLD). In 1921 Ludwig Prandtl proposed a lift distribution over the wing’s span with optimum performance, in the shape of half ellipse. It is referred to as the Elliptical Lift Distribution (ELD). For the same values of CL, it was observed that the upwash and downwash exhibited values that were constant span wise. However, this trend was affected and altered whenever a change is brought about in the AoA that further resulted in a total downwash span wise. Initially it was assumed that this ELD was optimum for producing values that exhibit minimum induced drag (Di). However, Prandtl himself later corrected his initial proposal and introduced the concept of BSLD in 1933 [3-4]. For any wing of constrained mass, this BSLD gave a solution of minimum Di. As the name suggests, the shape of this lift distribution is of a bell with gradual tapering of CL values towards the tip of the wing which eventually tends to become zero. BSLD was characterized by comparatively less Di than ELD, the value stands at 11% Di for a wing with span 22% greater than in the case of a same wing with ELD. Furthermore, wingtips exhibited upwash characteristics and proverse yaw control. Another important characteristic of BSLD is that it facilitates tailless flight control. This is because at the tips of a wing with BSLD, induced thrust is produced (or negative Di) which is a direct result of the upwash produced at tips. The advantage of this is even in the absence of a tail or any vertical stabilizers, the aircraft or the bird (albatross) can perform a coordinated turn if the yawing moment produced by this negative Di or the induced thrust is large. Even the relative wind that acts on the tips of the wing with BSLD is angled upwards. As mentioned earlier, the ELD has a characteristic downwash that is constant in its magnitude; the BSLD shows a different trend. Here, the trailing edge (TE) downwash is a quadratic function of span-wise position and the maximum value occurs at the wing-root. Incorporation of BSLD in tailless flying wings can help to eliminate the sweep angle. The sweep angle actually helps increase the efficiency but also results in high values of Di. Shedding of vortices in a wing with BSLD occurs at 70-80% of the wing’s span unlike the ELD where the same occurs at the tips. The albatross’ wing does not exhibit deflections of the root feathers even when it is flying at 3G’s, a direct result of the vortex shedding characteristics of BSLD. Net force vector of a wing with BSLD is a characteristic function of the wing’s span. Inboard, the wing’s net force vector is tilted away from relative wind. The Di is produced due to the parallel component. As we tend to progress outboard, we will observe a decrease in the magnitude of this parallel component till it tilts into the relative wind [5-6].
Proverse yaw is an inherent characteristic of BSLD and it is an effective counter measure against the undesired adverse yaw. Adverse Yaw is the natural tendency of an aircraft to undergo yawing opposite to its rolling direction. Multiple measures such as Friese ailerons; manual control inputs etc are used. Generation of vortices at the tips of the wings is primarily due to imbalance in the pressure distribution (involved in lift generation). Curling up of air from the lower region having comparatively higher pressure than the upper region, causes the formation of these tip vortices. The vortex layer can categorized into 3 primary regions (based on a relation to turbulent boundary layer), namely, the vortex core (inner) region, logarithmic region, defect low region [7-8].
B. Dynamic Soaring
Migratory sea birds, especially the albatross deploy certain maneuvers to enhance the endurance of their flight and dynamic soaring is one such cheap maneuver in terms of energy dissipation. Without making use of the flapping flight mode, this bird can soar up to weeks due to this maneuver and its wing structure [9]. The main principle that governs this maneuver is the bird’s ability to extract energy from the shear wind field which is a region of boundary layer phenomena that extend up to 10-20 km above the ocean surface. The formation of the boundary layer is due to the frictional resistance of the layers in this wind field. The speed of wind near the ocean surface is nearly nil due to friction. The more closer you are to the water surface, the higher amount of frictional force you encounter. The friction decreases as we move upwards but its effect is definitely felt in the layer above. The albatross extracts the prerequisite energy for dynamic soaring from this very region. The dynamic soaring cycle consists of 4 phases and is a neutral net energy cycle. The cycle starts with the albatross climbing into the wind to initiate upwind soaring. It then curves to leeward and initiates the leeward decent. Finally it decelerates and performs a reverse turn close to the ocean to re-initiate the cycle. The need for all these phases is replenishment of energy that keeps varying during the cycle [10-11]. The energy is highest at the upper curve of the cycle. In order to counter the drag produced by the wind, the albatross utilizes the wind lift as an outboard propulsive unit for the required thrust.
The albatross replenishes the energy from the shear wind field and thus the cycle is almost endless and this enables the albatross to soar for miles and for weeks. One important point to note is that the energy gain for dynamic soaring is smooth and continuous and the energy extraction does not depend on wave soaring or wave lift [12].
C. Thermal Updrafts And Thermal Soaring
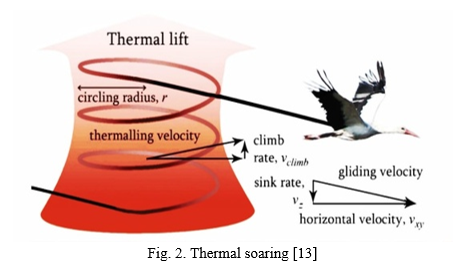
The basic concept behind the utilization of updrafts is that the speed of the rising hot columns of air is comparatively higher than the sink rate of the bird and this eventually helps the bird attain heights. Birds circle around a rising thermal to achieve the desired altitude and then they glide away towards the next thermal. They keep repeating this cycle to soar with minimum energy dissipation [13-14]. The formation of these thermal eddies is explained below.
The formation of these thermal eddies is due to the solar irradiation and atmospheric radiation. One postulation on the formation of thermals was proposed by Clarence D. Cone Jr. He argued that instead of warm air columns, it was actually closed thermal shells that aided in the soaring of these birds. Let us see the formation of one such thermal shell as per this postulation along with its peculiarities. This closed shell consists of a vortex core with the surrounding air around this core and inside the closed shell is circulation about this core. The core is buoyant in nature due to this circulatory flow. A stagnant interior of the air column also contradicts the bird’s circling and gliding phase as if there existed a stagnant interior of the air column, it would not be able to sustain the gained height. It was only due to the up-current of this shell that the bird could attain and sustain the altitude and also perform the looping maneuver. Another reason is that soaring efficiency is optimum in calm air. The aerodynamic relation between the bird and the shell is complex. This is because for equilibrium to be maintained in order to sustain the loops, the bird must ensure that its turn radius is low but this in turn also increase the rate of sink. This will further make the sink rate higher than the up-current of the thermal. Due to all these complexities, a quantitative approach is better suited to address these. The formation takes place, as mentioned earlier, due to radiations that heat up the earth and this in turn heats up the subsequent layers of air above the earth (along with the air’s moisture content). The heated air will be of less density and hence will rise in the form of a thermal shape (mushroom shape). The temperature difference between the outer and inner regions of this shell induces vorticity and this causes the buoyant shell to rise. The diameter of this shell will vary as it reaches higher altitudes due to varying temperature differences between the outer and inner region and also the different densities of air and moisture. Another point to note is that as the diameter of the shell increases, we can expect the rate of rise or ascend gets reduced. This closed shell can sustain itself without any contact with the ground.
D. Control Surface Dynamics
One observable maneuver that a eagle performs during soaring is the longitudinal dihedral of the wing. What this does is that it enhances the eagle’s pitch stability and acts as an effective counter measure for the nose down pitching moment which generally acts whenever the lift is acting aft of the bird’s mass center. Other control surface dynamics deployed by the bird to sustain its pitch stability can also be observed in its wing morphing maneuvers [15]. The root of the wing has higher angles of incidence than the tips and is characterized by wash-out when a backward sweep angle is deployed by the bird. A reverse maneuver is also observed where the wash-out is comparatively more at the tips with a forward sweep. These maneuvers help sustain pitch stability. In order to counter adverse yaw characteristics, the bird performs twisting maneuvers with its tail that enables it to maintain yaw stability [16]. Another maneuver that the bird performs as a stimulus to decrease in lift generation is wing tucking.
These birds manipulate and adapt to flow separation and attachment with the aid of their covert feathers that exhibit flexibility and rigidity as per the atmospheric condition and the bird’s flight mode. This is something that is difficult to incorporate in modern day planes wherein wing morphing has its limitations.
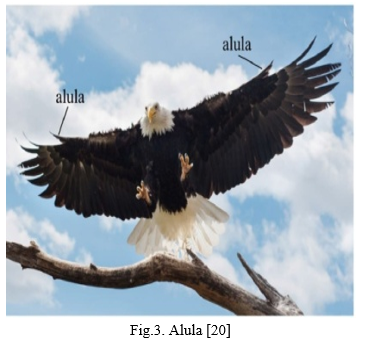
A LE high lift control surface utilized by these natural flyers is the Alula which is the slat equivalent of a modern day aircraft. The function too is similar where both lift and stall angle is expected to be high. On deployment, the Alula produces a velocity field with characteristics that are negative with respect to the bird’s airfoil. What this basically does is that it improves the stall characteristics even at higher AoA. During landing, a bird will require to bring down its speed and while doing so it has to utilize its spoilers or drag components. And as we know, if the drag values are increased, then there will be a subsequent decrease in lift and to maintain the lift, the bird in turn has to increase its AoA. Flying at very high AoA will lead to wing stall. These perturbations call in the deployment of the Alula which reduces the adverse pressure gradient that is formed at the upper region of the airfoil thus delaying the stall.
Birds pose wingtips as well which are complemented by strong feathers that can resist deflection even under heavy atmospheric loads. Drawing similarities in function with an aircraft, these winglets help in lowering the magnitude of take-off distance. The Di values are reduced and hence minimize energy dissipation and enhance fuel efficiency. Better stall characteristics are observed.
The vortex shedding is also dependant on these winglets- the angle, positioning, length and quantity of these tip-sails. These also affect the longitudinal stability of the bird.
These winglets are supplemented by slots. These help the bird perform a banking maneuver with minimal energy dissipation unlike an aircraft where we have to manipulate the lift generated at both wings in order to perform a banking maneuver. Slight deflections will cause a banking turn in a bird. These also prevent shock waves from forming when the bird performs a subsonic dive [17].
Let us take a look at the flap equivalent of birds. The actuation of these flaps occurs passively as stimulus to atmospheric perturbations causing stall. These flaps are basically feathers that are present in the lower region LE. As a response to perturbations, they undergo deflection, especially during landing to enhance stall countering measures. At higher AoA the deflections are also high. These feathers have a striking resemblance to Krueger flaps deployed in aircrafts [18] [19]. These control surface dynamics are very crucial during flight at low Re values.
III. IMPLEMENTATIONS
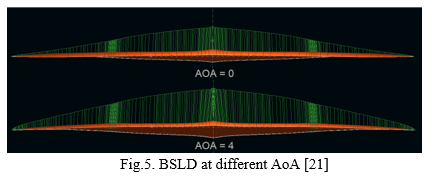
The objective of this review is to aid in the design of a bionic UAV which is currently being studied by the authors. The incorporation of BSLD will help in a smoother transition in terms of upwash to downwash and further help to decrease the radii of the tip vortices. Furthermore, the albatross’ wing with its optimum L/D ratio and stall characteristics will further improve the aerodynamic properties of the UAV. Similarly a falcon’s body is currently being used for its tear drop structure and airfoil like characteristics. Similar works are being carried on eagle’s slotted wings. The following are few results of the designed wing with BSLD and albatross’ wing structure. The authors then carried out multiple simulations on the wing-
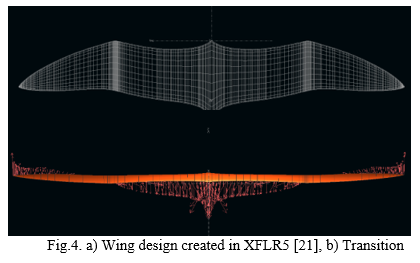
The above image Fig. 4. b) shows the upwash to downwash transitional phase. The absence of downwash at the tips is a direct result of a wing with BSLD and hence eliminates the formation of wingtip vortices. A detailed work on the same wing has been carried out as well- [21].
The aim was to draw parallels between different aerodynamic phenomenon and techniques and explain their co-relations and also incorporate these in future works.
IV. ACKNOWLEDGMENT
The authors would like to thank the Department of Aerospace Engineering, Lovely Professional University, India for their guidance and support in the completion of this work.
References
[1] B. C. Mathew, J. V. M. Lal Jeyan, P. Dutta, and R. R. Savale, “Evolutionary and Hereditary Traits of an Albatross and its Aerodynamic Optimality,” IOP Conf. Ser. Earth Environ. Sci., vol. 775, no. 1, p. 012002, Jun. 2021, doi: 10.1088/1755-1315/775/1/012002. [2] H. Babinsky, “How do wings work?,” Phys. Educ., vol. 38, no. 6, pp. 497–503, Nov. 2003, doi: 10.1088/0031-9120/38/6/001. [3] D. F. Hunsaker and W. F. Phillips, “Ludwig prandtl’s 1933 paper concerning wings for minimum induced drag, translation and commentary,” in AIAA Scitech 2020 Forum, 2020, vol. 1 PartF, pp. 1–12, doi: 10.2514/6.2020-0644. [4] L. J. Newton, “Stability and control derivative estimation for the bell-shaped lift distribution,” 2019, doi: 10.2514/6.2019-0157. [5] J. Richter, K. Hainline, S. Louis, R. K. Agarwal, J.?; Richter, and K.?; Hainline, “Examination of Proverse Yaw in Bell-Shaped Spanload Aircraft Examination of Proverse Yaw in Bell-Shaped Spanload Aircraft Recommended Citation Recommended Citation,” Accessed: Jul. 19, 2021. [Online]. Available: https://openscholarship.wustl.edu/mems500https://openscholarship.wustl.edu/mems500/91. [6] A. H. Bowers, O. J. Murillo, R. \\\" Red, \\\" Jensen, B. Eslinger, and C. Gelzer, “On Wings of the Minimum Induced Drag: Spanload Implications for Aircraft and Birds,” 2016. Accessed: Apr. 29, 2021. [Online]. Available: http://www.sti.nasa.gov. [7] P. Panagiotou, G. Ioannidis, I. Tzivinikos, and K. Yakinthos, “Experimental Investigation of the Wake and the Wingtip Vortices of a UAV Model,” Aerospace, vol. 4, no. 4, p. 53, Nov. 2017, doi: 10.3390/aerospace4040053. [8] J. N. Nielsen and R. G. Schwind, “Decay of a Vortex Pair behind an Aircraft,” in Aircraft Wake Turbulence and Its Detection, Springer US, 1971, pp. 413–454. [9] A. Evans, “Secrets of the albatross’s soaring success,” Journal of Experimental Biology, vol. 221, no. 1. Company of Biologists Ltd, Jan. 01, 2018, doi: 10.1242/jeb.169938. [10] P. L. Richardson, “Upwind dynamic soaring of albatrosses and UAVs,” Prog. Oceanogr., vol. 130, pp. 146–156, Jan. 2015, doi: 10.1016/J.POCEAN.2014.11.002. [11] J. Traugott, A. Nesterova, and G. Sachs, “The flight of the albatross,” IEEE Spectr., vol. 50, no. 7, pp. 46–54, 2013, doi: 10.1109/MSPEC.2013.6545122. [12] G. Sachs, J. Traugott, A. P. Nesterova, and F. Bonadonna, “Experimental verification of dynamic soaring in albatrosses,” J. Exp. Biol., vol. 216, no. 22, pp. 4222–4232, Nov. 2013, doi: 10.1242/jeb.085209. [13] Z. Ákosl, M. Nagy, S. Leven, and T. Vicsek, “Thermal soaring flight of birds and unmanned aerial vehicles,” Bioinspiration and Biomimetics, vol. 5, no. 4, Dec. 2010, doi: 10.1088/1748-3182/5/4/045003. [14] “THERMAL SOARING OF BIRDS on JSTOR.” https://www.jstor.org/stable/27838346?seq=1 (accessed May 04, 2021). [15] J. A. Gillies, A. L. R. Thomas, and G. K. Taylor, “Soaring and manoeuvring flight of a steppe eagle Aquila nipalensis,” J. Avian Biol., vol. 42, no. 5, pp. 377–386, Nov. 2011, doi: 10.1111/j.1600-048X.2011.05105.x. [16] D. Tang et al., “Shape reconstructions and morphing kinematics of an eagle during perching manoeuvres*,” Chinese Phys. B, vol. 29, no. 2, p. 024703, Feb. 2020, doi: 10.1088/1674-1056/AB610A. [17] R. R. Graham, “Safety Devices in Wings of Birds,” J. R. Aeronaut. Soc., vol. 36, no. 253, pp. 24–58, Jan. 1932, doi: 10.1017/s0368393100111708. [18] A. C. Carruthers, A. L. R. Thomas, and G. K. Taylor, “Automatic aeroelastic devices in the wings of a steppe eagle Aquila nipalensis,” J. Exp. Biol., vol. 210, no. 23, pp. 4136–4149, Dec. 2007, doi: 10.1242/jeb.011197. [19] “Aerodynamic analysis of bionic winglet- slotted wings,” Mater. Today Proc., May 2022, doi: 10.1016/J.MATPR.2022.04.752. [20] T. Linehan and K. Mohseni, “Scaling trends of bird’s alular feathers in connection to leading-edge vortex flow over hand-wing,” Sci. Reports 2020 101, vol. 10, no. 1, pp. 1–14, May 2020, doi: 10.1038/s41598-020-63181-7. [21] B. C. Mathew, S. K. Sahu, P. Dutta, R. Savale, and M. Jv, “Issue 3 Article 1 Part of the Aerodynamics and Fluid Mechanics Commons, and the Aeronautical Vehicles Commons Scholarly Commons Citation Scholarly Commons Citation,” Int. J. Aviat. Aeronaut. Aerosp., vol. 8, no. 3, 2021, doi: 10.15394/ijaaa.2021.1598.
Copyright
Copyright © 2022 Prantik Dutta, Afeedh Roshan. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET46134
Publish Date : 2022-08-02
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online