

Ijraset Journal For Research in Applied Science and Engineering Technology
Blind Person Smart Helmet
Authors: Vaibhav Jaiswal, Nikhil Singh, Saksham Mishra, Prof. Garima Singh
DOI Link: https://doi.org/10.22214/ijraset.2022.44716
Certificate: View Certificate
Abstract
Blind people and other visually impaired, physically disabled people in our society face difficulties in moving in daily life. Due to poor visibility, they often fail to detect surrounding obstacles and injure themselves. Due to blindness, involuntary abnormal movements, and lack of a timely rescue system, the degree of injury and other adverse effects are aggravated. One possible way to alleviate the suffering of blind and visually impaired person could be to design an assistive device capable of taking corrective action based on location, proximity and fall event information (if applicable). The goal of this research was to develop a costeffective, comfortable and easy to manufacture smart helmet for safe and smooth mobility for the blind person.
Introduction
I. INTRODUCTION
The number of people who are completely blind or visually impaired is increasing. According to WHO, 253 million people live with visual impairments, of which 36 million have visual impairments and 217 million have moderate to severe visual impairments (worldwide). Health Organization, no date). Chronic eye disease is the leading cause of vision loss worldwide. Eightyone percent of the 253 million people with a visual impairment of degrees are over 50 years old. (World Health Organization, no date). Approximately 1.4 million adolescents suffer from end-stage blindness and need visual rehabilitation therapy to improve function and reduce disability (World Health Organization, 2012). In order for visually impaired people to lead a fulfilling life, about must be able to move independently. Furthermore, there are many people of random age who are visually impaired and face plenty of troubles while walking. So, to assist these people, a safe and smooth walking assistant is of dire need. During walking, due to muscle weakness and visual distress, these people often find it difficult to walk in a straight path and get injured because of obstacles. Sometimes they fall as well, because of these obstacles or due to sickness and improper physical conditions. Falls can cause a variety of outcomes ranging from minor injury to serious injury and even death. This situation deteriorates with the unavailability of salvage within a short period of time after falling [2]. If left unaided for a long time, it might even result in death. It is very risky for visually challenged people to cross the road, even to walk alongside the footpath as they may get deviated away from their pathway. Around 285 million people are estimated to be visually impaired worldwide: 39 million are blind and 246 have low vision. 82% of people living with blindness are aged 50 and above [3]. In our prototype, all features considered were important, including all the features needed for a safe overall smooth walk. One of our equipment's most innovative and noble characteristics is the straight-walking aid feature for which no other device exists at present. We selected the head as the attachment point of our device because our head gains maximum acceleration while falling. When a fall occurs, a large change is made to read the accelerometer, thereby facilitating the verification standard of the threshold clear. The inner part of the helmet is coated with foam and possibly reducing head injury. If the injury is slight, the user can end the process with the manual reset button. If the manual reset key is not pressed within a predetermined time, this is a severe injury and a rescue message is sent if it is. When the feedback form is received, the device is reset. Otherwise, it also sends messages to the list of new people. In the case of serious injury, is indispensable to count as soon as possible. In order to accelerate the rescue operation, the GPS tracker was set to notify the rescue team via the injured user position. When a person is at home, there is provision for automatically unlocking the door through the wireless system which saves valuable time.
The goal of this research was to develop a cost-effective, comfortable and easy to manufacture smart helmet for safe and smooth mobility for the blind person. If the user gets too close to a hurdle, such as a table or another item, the gadget will sound an alarm to prevent an accident. Some of the key features of that will be offered by the helmet are obstacle sensing, of which provides support in a straight line and fall detection. There is currently no such technology that integrates all these features into a single device. The proposed device uses a very simple methodology. The system takes accelerometer readings and distinguishes drops from other normal operations using an adaptive threshold set in the three-axis direction. This device enables a visually impaired person to walk straight by using the angular deviation of head movement obtained from the gyroscope. Finally, a few sonar sensors are attached to the helmet to detect obstacles around the user in the range from degrees to 360 degrees.
During the fall event, the system continued to send help requests to pre-assigned caregivers using the GSM module, until one of them responded. In addition, the device is wirelessly arranged to unlock the front door to facilitate rescue operations when the victim is at home. This device shows an almost success rate of 85%. The implication of this safe and smooth motion assistant will be to reduce the number of accidents, reduce the time for medical care, increase surveillance capacity, thus reducing injury, and thus ensure the independent life of the target group.
This helmet is light and comfortable. All devices used by our devices are very cheap. Therefore, people from all walks of life can probably afford this smart hat. The cost of this smart hat unit is primarily $ 165. However, if you decide to mass-produce the cost can be reduced to about $ 120. In today's world, most of the innovations and advances are dedicated to the young generation. There is little work focused on making the lives of visually impaired people easier. In this busy working life, everyone is so busy with life that few people notice the loneliness of blind people, let alone take care of them. In such situations, technology dedicated to monitoring the disabled person not only gives them the ability to live independently, but also gives them mental strength
II. METHODOLOGY
A. Objectives
The main objectives of the proposed Project are:
- To create a compact, self-sufficient system that allows these visually impaired people to move around the environment.
- To design a portable system.
The proposed system is composed of two modules:
- Obstacle detection and obstacle warning.
- Fall detection and informing the relatives about the accident that happens.
B. Hardware Requirement
- Arduino: The Arduino Uno is the most widely used and documented board in the world. It has 14 digital input/output pins (6 of which can be used as PWM outputs), 6 analog inputs, 16 MHz quartz crystal, USB connection, power socket, standard ICSP header and reset button.

Hardware Requirement
|
S.no |
Components |
Description |
Quantity |
|
1 |
Arduino |
UNO R3 |
1 |
|
2 |
MPU6050 6-axis Gyroscope/Accelerometer |
Gyroscope + Accelerometer |
1 |
|
3 |
Breadboard |
Solderless Breadboard Mini |
1 |
|
4 |
Jumper Wires |
Connecting Wires |
4 |
|
5 |
Helmet |
Head Gear |
1 |
|
6 |
Ultrasonic Sensor |
Sensor |
4 |
|
7 |
GSM Module |
Chip |
1 |
2. MPU6050 6-axis Gyroscope: MPU 6050 6-axis gyroscope and accelerometer module. World's first 6-axis integrated motion tracker that combines a 3-axis gyroscope, a 3-axis accelerometer, and a digital motion processor digital. The MPU60X0 includes three 16-bit analog-to-digital converters (ADCs) to digitize the gyroscope output and three 16-bit ADCs to digitize the accelerometer output. It also tracks very small movements.

3. Breadboard: It is a thin plastic board is used to hold electronic components (transistors, resistors, chips, etc. and also used to develop electronic circuit prototypes, electronic circuit boards can be substituted for future work.
4. Ultrasonic Sensor: This device is used to measure the distance of an object. It can detect objects in the range from 2cm to 450cm. The device uses two digital pins to communicate the distance found. The ultrasonic range sensor, which works by sending out an ultrasonic pulse at around 40kHz, then it waits and listens for the echo back, calculating the time taken in microseconds. We can trigger a pulse as fast as 20 times per second and it can identify objects up to 3 meters away and as close as 3 centimeters. The sensor needs a 5V supply to work.

5. GSM Module: A GSM module or GPRS module is a chip or circuit that will be used to establish communication between a mobile device or a computer and a GSM or GPRS system.

The template is used to format your paper and style the text. All margins, column widths, line spaces, and text fonts are prescribed; please do not alter them. You may note peculiarities. For example, the head margin in this template measures proportionately more than is customary. This measurement and others are deliberate, using specifications that anticipate your paper as one part of the entire proceedings, and not as an independent document. Please do not revise any of the current designations.
III. PROPOSED METHOD
A. Signal Acquisition
- Sonar Sensor: HC SR04 ultrasonic range module provides a non-contact measurement function from 2cm to 400cm, range measurement accuracy of can reach up to 3mm. The module contains an ultrasonic transmitter, receiver, and control circuit. The HC SR04 requires a 5-volt power supply, uses a trigger pulse input, and provides an Echo pulse output.
- Accelerometer and gyroscope: We used the MPU6050 sensor, which combines an accelerometer and a gyroscope into a single chip. Three 16-bit analogy-to-digital converters (ADCs) are included in the MPU-60X0 for digitizing the data. To accurately track both high and low-speed motions, the parts are ± 2g, ± 4g, ± 8g, and ± 16g with a full range of user-programmable accelerometers and programmable gyroscopes full-scale range of ± 250, ± 500,±1000 and ± 2000 ° / s (DPS). One of the main applications for 3-axis accelerometers is the wearable biosensor of the remote health monitoring system.
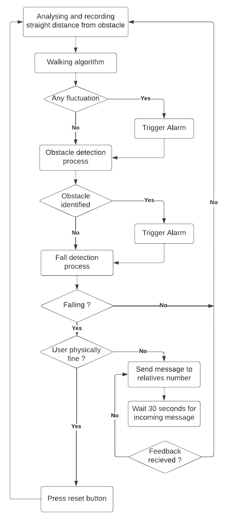
B. Detection algorithm
- Obstacle detection algorithm: HCSR04: Obstacle detection algorithm: HC SR04 automatically sends eight 40KHz signals and detects if the pulse signal returns. When the transmitted signal returns to the object at a distance of "d" and echoes, the signal covers a distance of “2d". To avoid impact, it is advisable to warn the user if obstacles are within a minimum distance of the user. Therefore, if the time of the received signal is shorter than the predefined threshold time (tth), the alarm sounds the buzzer. For our purposes, we need a sonar sensor mounted 90 degrees away on the outer surface of the helmet.
- Fall Detection Algorithm: Threshold-based approaches are commonly used for data from individual sensors, such as accelerometers, gyroscopes, and electromechanics. A very simple threshold-based algorithm was applied for fall detection and the overall success rate was approximately 98%. Their decisions are made by comparing the measured values of the relevant sensors with the threshold values established empirically. It is very important to evaluate the proposed fall detection system under actual conditions. Aziz and associates performed a comparison of the accuracy of 10 accelerometer-based fall detection algorithms, 5 of them used a threshold-based approach while the other 5 used a machine learning-based approach to detect falls.
IV. FUTURE SCOPE
Any device or product has few scope for it'simprovement . Every device that has been studied under the survey has their own features. The devices that has been proposed till date are either based on obstacle detection or to detect fall. But in this device one more feature is added. It will send message automatically when a blind person could be in trouble, the user just have to press a button . Some more features could be added like , detecting the humans faces and object properties with the help of Machine Learning and it could also provide the directional path assistance to the blind person.
Conclusion
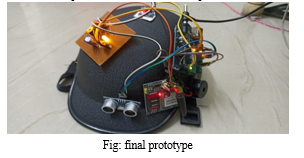
We developed our smart helmet prototype and performed system testing. This smart helmet is very effective for blind person. The person has to wear this smart helmet to walk around safely and to avoid collision from unwanted object comes in front of the blind person which results into minimise injuries. This device is very easy to use and cost effective.
References
[1] T. Shany, S. J. Redmond, M. R. Narayanan, and N. H. Lovell, “Sensors based wearable systems for monitoring of human movement and falls,” IEEE Sensors Journal, vol. 12, no. 3, pp. 658670, 2012. [2] L. Qiang, J. A. Stankovic, M. A. Hanson, A. T. Barth, J. Lach, and G. Zhou, “Accurate, fast fall detection using gyroscopes and accelerometer derived posture information,” in Proceedings of the 6th International Workshop on Wearable and Implantable Body Sensor Networks (BSN ’09), pp. 138143, Berkeley, Calif, USA, June 2009. [3] D. Dakopoulos, and N. G. Bourbakis, “Wearable obstacle avoidance electronic travel aids for blind: A survey,” IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews) , vol. 40, Issue: 1, pp. 25-35, 2010. [4] U. Lindemann, A. Hock, M. Stuber, W. Keck, and C. Becker,“Evaluation of a fall detector based on accelerometers: a pilot study,” Med. Biol. Eng. Comput., vol. 43, Issue 5, pp. 548551, 2005. [5] O. Oladayo, \"A Multidimensional Walking Aid for Visually Impaired Using Ultrasonic Sensors Network with Voice Guidance\", International Journal of Intelligent Systems and Applications, vol. 6, no. 8, pp. 53-59, 2014. [6] R. K. Yadla, B. S. Mohan Vanacharla, K. Gupta, P. M. Tiwari and G. Yadav, \"Design of Assist Helmet with Two-Way Tracking Ability for Visually Impaired,\" 2018 International Conference on Automation and Computational Engineering (ICACE), 2018, pp. 79-83, doi: 10.1109/ICACE.2018.8686860. [7] N. Dey, A. Paul, P. Ghosh, C. Mukherjee, R. De and S. Dey, \"Ultrasonic Sensor Based Smart Blind Stick,\" 2018 International Conference on Current Trends towards Converging Technologies (ICCTCT), 2018, pp. 1-4, doi: 10.1109/ICCTCT.2018.8551067.
Copyright
Copyright © 2022 Vaibhav Jaiswal, Nikhil Singh, Saksham Mishra, Prof. Garima Singh. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET44716
Publish Date : 2022-06-22
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online