

Ijraset Journal For Research in Applied Science and Engineering Technology
Blood Test Robot
Authors: Kunal Jadhav, Dhanraj Kumkar, Sunandan Kumbhar
DOI Link: https://doi.org/10.22214/ijraset.2023.56616
Certificate: View Certificate
Abstract
In the realm of medical diagnostics, blood tests play a vital part, serving as an abecedarian approach for complaint analysis. still, the reliance on mortal prosecution introduces an implicit source of error, arising from indeed the most minute miscalculations. In order to address this challenge and enhance the delicacy and responsibility of blood testing procedures, a new approach is being pursued. This action centers on the development of a sophisticated robotic arm acclimatized for the precise prosecution of blood tests. By integrating advanced robotization and robotics technologies, the ideal is to significantly dock mortal involvement in the testing process, thereby mollifying the essential pitfalls associated with mortal error. The envisaged robotic system is poised to bring about a transformative shift in blood testing practices, icing an advanced degree of perfection and trust ability in test issues. The proposed robotic arm aims to replicate the intricate movements and dexterity of mortal technicians while circumventing the implicit risks introduced by mortal fallibility. Through scrupulous engineering and slice- edge software, the robotic arm will seamlessly maneuver the necessary outfit, conduct blood tests, and induce accurate results. This invention not only minimizes the liability of crimes but also expedites the testing process, leading to bettered effectiveness in healthcare settings. By employing the eventuality of robotics, this design strives to usher in a new period of blood testing, characterized by enhanced delicacy, reduced mortal intervention, and heightened responsibility of results. Eventually, this pursuit stands to revise the geography of individual drug, reaffirming the commitment to delivering precise and dependable healthcare results
Introduction
I. INTRODUCTION
Robotic technology is rapidly evolving, with a growing emphasis on affordability and functionality. This contributes to the advancement of low-cost robotic arms by presenting a comprehensive design and implementation of a six-degree-of-freedom (6-DOF) arm that strikes a balance between cost-effectiveness and capability.[1] The paper is based on the work of several prior researchers in related fields. Zhang et al. (2013) developed a PLC-based solenoid valve operating life test system that is highly automated, reliable, and easy to use. This system is effective in evaluating the operational lifespan of solenoid valves, and it serves as a robust platform for testing and research in high-performance solenoid valve development.[2] Cianferoni et al. (2022) introduced a novel robotic device intended for contactless interaction with shared interfaces during pandemic emergencies. Their device was successfully tested across diverse interfaces, and it has the potential to mitigate infection risks in future pandemics.[3] Sivabalan et al. (2017) contributed to education with a practical robotic arm controller that facilitates the teaching and learning of robotic arm algorithms. Their integrated system, comprising an OWI robotic arm, an Arduino controller, a MATLAB GUI, and accelerometers, enables remote arm control and versatile pick-and-place tasks.[4] Wang et al. (2022) presented an ambitious project merging robotic phlebotomy with automated diagnostics. Their envisioned platform combines an image-guided venipuncture robot with a centrifuge-based blood analyser, promising to revolutionize blood testing procedures.[5]
II. LITERATURE REVIEW
Increased demand for continuous operation is driving the present increase in industrial robotic arm development. These robotic systems are available around-the-clock, boosting production through reduced cycle times, manufacturing versatility, higher-quality products, and safer working conditions. The name "robot" derives from "robota," Czech for "slave laborer," which Karel Capek coined in the 1920s. Modern robots are adaptable, programmable, and used in a variety of industries, including entertainment, transportation, and health. Industrial robots, such as programmed transfer machines, perform a variety of functions. This overview discusses the many categories of robotic arms, their mechanical parts, design issues, and applications.[6] Robots, which are distinguished by accurate and repeated task performance, have a wide range of uses, most notably in hazardous site exploration. Their widespread integration has greatly decreased the need for human involvement. Common operations like welding, trimming, and picking are frequently managed by keypads and voice commands. This research focuses on a robotic arm with 5 degrees of freedom that is controlled by an Arduino Uno and potentiometers to ensure great precision and minimal time delays.
A key factor is the arm configurations, which might be Cartesian, cylindrical, spherical, articulated, or SCARA. The arm being highlighted uses rotary joints, which enhance its range of manipulation by allowing for flexible movements and increased capabilities.[7] Automation has become increasingly important in today's technologically advanced world. Robotics allows for highly precise, time- and resource-efficient operations as a result of the increasing complexity of tasks. Robots improve human task quality, productivity, and potential for innovation by being available 24/7. Robotics is an interdisciplinary field that integrates mechanical and electrical engineering with computer science. Using platforms such as Arduino, robotic arms are controlled by potentiometers to achieve multidirectional movement. These arms replicate human capabilities and have applications in industries, hazardous situations, and IoT-driven automation. IoT integration improves data transmission by providing real-time control and automation. This assessment emphasizes how important robotics is to improving productivity, security, and the possibility for IoT-driven automation.[8] A robot is a flexible organism that can carry out tasks autonomously or under supervision, frequently with the use of computer programming. It has a wide range of uses, from routine home tasks to risky ventures like space exploration. Software programming is crucial to controlling a robot's movements, and while the procedure has gotten better, development is slower than with other control systems due to the lack of industry-standard software tools. Haptic technology uses tactile feedback to improve virtual item creation and machine control, hence improving our understanding of touch perception. This study examines robot interface and design elements, highlighting the interdisciplinary nature of robotics and the improvements in haptics. The format of the study ranges from concept elucidation to implementation and findings, concluding with conclusions.[9] The development of soft inflatable robotic arms has accelerated because of their adaptability to interactions between humans and robots and because they are lightweight and inexpensive. Traditional rigid robotic arms are excellent in industrial environments but present safety risks when near people. Alternatives that show promise are soft inflatable robotic arms made of elastomeric materials. For soft arm bending, several actuation systems have been investigated, including cable-driven mechanisms, pneumatic artificial muscles (PAMs), and inflated joints. This work offers an inflatable soft robotic arm with fabric-based joints that has a strong force output, a lightweight design, and low-pressure actuation. Because it can be used in residential settings, it can help those who are paralyzed.[10] Service robots operating in human environments necessitate enhanced safety measures for physical interactions. Safe robot arms utilizing passive compliance methods have been explored for collision safety, using mechanical elements like springs and flexible links to absorb impact forces. Achieving optimal compliance without compromising accuracy remains a challenge. Various mechanisms have been proposed, often requiring extra actuators and adding complexity. This paper introduces the Safe Joint Mechanism-II (SJM-II), a compact, passive safety mechanism for robot arms. It features a nonlinear spring system and double-slider mechanism for collision detection. The approach aims to balance compliance, accuracy, and simplicity, contributing to safer human-robot interactions.[11]
III. METHODOLOGY
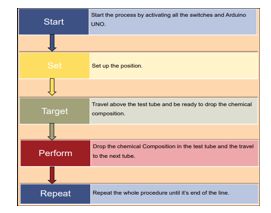
- Switch with Arduino UNO Activation: The Arduino UNO microcontroller and all required switches are turned on to begin the experimental process. The system is initialized in this step, preparing it for later operations. Switches act as control inputs to initiate activities, with the Arduino UNO serving as the main processing device.
- Position Configuration: The initial position's setup is established after the system is turned on. The work sequence is started with the robotic arm in a predefined location. This guarantees that the initial circumstances for each iteration are consistent.
- Test Tube Approach and Chemical Dispensing Setup: The robotic arm is designed to move toward the specified test tube and perfectly place itself above it. The system gets ready for the dispensing of chemical compositions. For controlled dispensing, this entails calibrating the arm's position and guaranteeing precise alignment.
- Chemical Composition Dispensing: The robotic arm begins the chemical composition dispensing procedure after attaining exact alignment. To make sure that the process is accurate, this is carried out with meticulous oversight. Using preprogrammed commands, the robotic arm discharges the chemical composition into the test tube.
- Transition to Next Test Tube: After the chemical is dispensed successfully, the robotic arm retracts from the open test tube and advances to the one after it in the line. To match with the new test tube's location throughout this transition, precise positioning modifications are necessary.
- Iterative Procedure: Up until the task reaches the end of the test tube line, the complete sequence is repeated iteratively. Each test tube is sequentially approached, distributed, and moved in a repeatable manner by the robotic arm. Every test tube inside the designated line will have the desired task completed thanks to this iterative approach.
The process outlined above ensures that the experiment is carried out methodically, allowing the robotic arm to carry out the required chemical dispensing duty precisely and dependably.
Switches and the Arduino UNO are turned on to start the operation, and position configuration ensures reliable beginning conditions. The approach, dispensing, and transition procedures are methodically carried out, and the process is done in a controlled and consistent manner for each test tube.
IV. IMPLEMENTATION
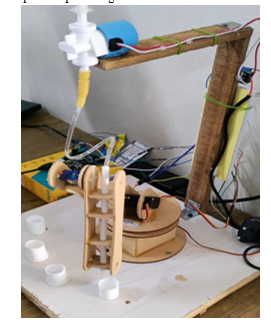
The selection of materials, setup configuration, coding, and component use are all covered in the practical procedures that were taken to develop and test the robotic arm in this part. This procedure explains how to build a working robotic arm system using an Arduino UNO, MDF material, servo motors, and the Arduino IDE software.
The careful selection of appropriate supplies and parts for putting the robotic arm together served as the catalyst for the implementation process. This required giving considerable thought to elements like robustness, weight, and compatibility. Due to its structural soundness and simplicity of manufacture, Medium-Density Fibreboard (MDF) was one of the materials used. Servo motors were also recognized as essential parts for permitting controlled arm movements.
The Arduino UNO microcontroller, a key component of the system, was set up as part of the implementation phase. This required setting up the Arduino UNO and its related components to efficiently communicate and carry out activities. The system was given the ability to process inputs and carry out preprogrammed commands by integrating the Arduino UNO.
The writing of code in the Arduino IDE program was the following stage in bringing the robotic arm to life. The code included the programming logic necessary for the robotic arm's exact movement and operation. The programming specified how the servo motors would react to various inputs, allowing the arm to do jobs precisely and consistently.

The creation of a fully functional robotic arm required the integration of numerous components throughout installation. The system's foundation was the Arduino UNO Kit, which included a microprocessor, sensors, and other crucial components. The structural framework of the arm was built using MDF material, which offered support and stability. Servo motors were also used to provide coordinated and controlled movement of the arm's parts.
V. TESTING
After the implementation phases, exacting testing procedures were carried out to guarantee the robotic arm's performance and functional integrity.
- Material Durability and Compatibility: Stress tests were performed on the built MDF structure to determine its durability and compatibility. This procedure was designed to make that the selected material could survive the forces and motions involved in using the arm.
- Arduino UNO Configuration: The Arduino UNO setup was thoroughly tested to ensure that it communicated with all attached components without a hitch. To evaluate the system's responsiveness and its capacity for precise command execution, inputs were given.
- Code Validation: To ensure the precision of the arm's motions and functions, extensive testing of the coded logic was done. The detection and correction of any programming mistakes or inconsistencies were made possible by iterative testing.
- Servo Motor Coordination: To verify that the robotic arm executed the desired positions and operations without errors, the servo motors' synchronization and coordinated movements were thoroughly checked.
- Execution of Functional activity: The last stage of testing comprised carrying out the intended activity, during which the robotic arm successfully moved and carried out its predetermined action, confirming its accuracy and dependability.
In conclusion, material selection, setup configuration, coding, and component integration were all involved in the robotic arm's implementation. The arm's structural integrity, system communication, code accuracy, servo motor synchronization, and task execution were rigorously tested. The creation of a reliable and workable robotic arm system was made possible by the painstaking implementation and strict testing methods.
VI. NOVELTY FEATURES / FINDINGS
The project at hand has uncovered a wide range of novel elements and significant findings that have significant consequences for the development of joint projects, technology adaption, and medical applications. The course of the project has shown new directions and opportunities that have the potential to greatly improve precision, effectiveness, and teamwork in the medical industry.
The project's innovative elements and significant discoveries ring out as ground-breaking contributions to the areas where technology and healthcare intersect. A trajectory of development that holds the promise of revolutionizing medical procedures is shaped by the effectiveness of computer technology in medical applications, the fine-tuning of pre-trained models for heightened accuracy, the significance of scalability in real-time testing, the potential of technology across applications, and the collaborative impetus for innovation. The project's development is used as an example of how innovation, collaboration, and adaptation may work together to pioneer revolutionary ideas for improving accuracy, productivity, and patient-centered care in the medical industry.
Conclusion
The development of B-TEST ROBO has shown promising results in performing blood tests effectively. The system provides a much more accurate way of performing the blood tests than traditional methods. This is because B-TEST ROBO uses advanced computer vision techniques and deep learning algorithms to analyse the blood samples. The system can also perform several different types of tests simultaneously, which can save time and improve efficiency. In the future, B-TEST ROBO could be used to automate the blood testing process in hospitals and clinics. This would free up healthcare workers to focus on other tasks, such as providing patient care. B-TEST ROBO could also be used to improve the accuracy of blood tests in developing countries, where there is often a shortage of qualified healthcare workers. Overall, B-TEST ROBO is a promising new technology that has the potential to revolutionize the way blood tests are performed. The system is accurate, efficient, and scalable, and it has the potential to improve the quality of healthcare around the world.
References
[1] S. Karmoker, M. M. Hossain Polash, and K. M. Z. Hossan, \"Design of a Low Cost PC Interface Six DOF Robotic Arm Utilizing Recycled Materials,\" Department of Electrical and Electronic Engineering, University of Asia Pacific (UAP), Dhaka, Bangladesh, and Department of Mechatronics Engineering, World University of Bangladesh, Dhaka, Bangladesh. [2] C. Xu, Y. Zhou, S. Cai, R. Qin, Y. Liang, and B. Pang, \"Designing and Research of a Solenoid Valve Operating Life Test System,\" Shenyang University of Chemical Technology, Shenyang, China, 110142. [3] E. Iadanza, G. Pasqua, D. Piaggio, C. Caputo, M. Gherardelli, and L. Pecchia, \"A Robotic Arm for Safe and Accurate Control of Biomedical Equipment During COVID-19.\" [4] K. Jahnavi and S. P., \"Teaching and Learning Robotic Arm Model,\" Department of Electrical and Electronics Engineering, Amrita School of Engineering, Amrita Vishwa Vidyapeetham, Amrita University, Coimbatore, India. [5] M. L. Balter, A. I. Chen, A. Fromholtz, A. Gorshkov, T. J. Maguire, and M. L. Yarmush, \"System Design and Development of a Robotic Device for Automated Venipuncture and Diagnostic Blood Cell Analysis.\" [6] Haider A. F. Almurib, Haidar Fadhil Al-Qrimli, and Nandha Kumar, \"A Review of Application Industrial Robotic Design,\" Department of Electrical & Electronic Engineering, The University of Nottingham Malaysia Campus, Jalan Broga, 43500 Semenyih, Malaysia. [7] Ankur Bhargava and Anjani Kumar, \"ARDUINO CONTROLLED ROBOTIC ARM,\" University School of Information, Communication and Technology, Guru Gobind Singh Indraprastha University, Delhi, India. [8] Navin Kumar Agrawal, Vinay Kumar Singh, Vinay Singh Parmar, Vijay Kumar Sharma, Dipti Singh, and Muskan Agrawal, \"Design and Development of IoT based Robotic Arm by using Arduino,\" Department of Computer Engineering and Applications, GLA University, Mathura. [9] A. Rama Krishna, G. Sowmya Bala, A.S.C.S. Sastry, B. Bhanu Prakash Sarma, and Gokul Sai Alla, \"Design And Implementation Of A Robotic Arm Based On Haptic Technology.\" [10] Xinquan Liang, Haris Cheong, Yi Sun, Jin Guo, Chee Kong Chui, and Chen-Hua Yeow, \"Design, Characterization and Implementation of a Two-DOF Fabric-based Soft Robotic Arm,\" IEEE Transactions on Robotics. [11] P. Chatzilias, Z. Kamarianakis, S. Golemati, and M. Christodoulou, \"Robotic control in hand-assisted laparoscopic nephrectomy in humans–a pilot study,\" Department of Urology, Hospital of Chania, Crete, Greece, and Department of Electronic and Computer Engineering, Technical University of Crete, Greece.
Copyright
Copyright © 2023 Kunal Jadhav, Dhanraj Kumkar, Sunandan Kumbhar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET56616
Publish Date : 2023-11-10
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online