

Ijraset Journal For Research in Applied Science and Engineering Technology
Brain Controlled Wheelchair using EEG Headset
Authors: Gagandeep Singh Siledar, Prof. Sarita Verma
DOI Link: https://doi.org/10.22214/ijraset.2021.39224
Certificate: View Certificate
Abstract
: In this paper, a brain controlled wheelchair has been designed which tends to reduce the complexity of movement for paralyzed people who are not capable of using various wheelchairs operating on technologies like joystick, finger movement or gesture controlled due to disability of moving body parts. The entire model is centrally based on Brain-computer Interface (BCI) combined with Raspberry Pi 3 and EEG sensor headset capture signals based on Neurosky mindwave technology which are further processed using MATLAB. Despite of the physical disabilities, this model will help quadriplegic patients to assist on their own and feel independent.
Introduction
I. INTRODUCTION
In recent studies, it has been found population of physically disabled people is around 15%, who suffer from mobility problems. They further face one or other kind of discrimination in society and feel abnormal or may be sometimes unwanted. This population is no doubt significant; all they need is proper assistance and technology that can make them independent. Researchers succeeded in proving that these people have sound brain operating excellently, so in this paper focus is made on utilizing this ability of quadriplegic patients (refers to paralysis of both hand and both legs ) to control wheelchairs using thoughts.
The human brain has complete control over body by sending signals, but when organs don’t function properly they can’t act according to signals received. In such cases a physically disable person feels dependent on others for mobility, to overcome this we made an approach to read the signals of brain that it passes to organs using EEG headset.
The brain is primarily made up of neurons and glia; these cells make tissues of the former organ. This tissue has glucose, many ionic salts and salt water altogether called as CSF (Cerebrospinal fluid) which acts as a good conductor of electricity. Neuron act as active conductors of electrical signal, and extends out long cables called axons that are responsible to propagate signals by exchanging rapid spikes of charges with CSF external fluid. The cables responsible for receiving signals are dendrites. So, Electroencephalography(EEG) will be measuring the aggregate of electrical activities generated by millions of cells in brain.
Further, establishing communication using EEG we make use of interface developed over some decades called BCI (Brain-computer Interfaces), this computer based system will obtain signals, process them by analyzing and translating signals to commands to machine as output to operate.
In this paper, we will see in detail the methodology and results of the brain controlled wheelchair using EEG headset.
II. METHODOLOGY
The three methodologies are as proposed below,
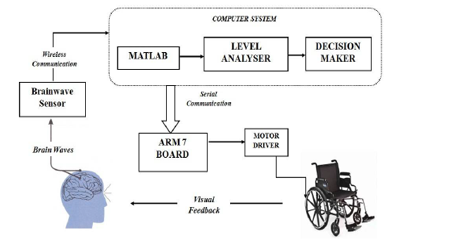
Figure 1: Block diagram showing the working principle of a brain controlled wheelchair using EEG Headset
A. BCI System Module
The EEG headset consists of bio-sensor (this technology plays a vital role in health care), it is try and single-channel. MATLAB tool is used to process the captured signals in the data processing module. Also, captured signals are pre-processed by Think-Gear and then passed to Raspberry Pi 3 B.
- EEG Headset: It is a sensor consisting of gold-plated dry electrodes with single channel having three contact points EEG, reference and ground. Signals generated at FP1 point detect and transmit data to the computer system in packets form.
B. Data Processing Module
Computer system mainly performs software based analysis. Matlab analyses data received from sensor. Artificial Neural Network (ANN) based algorithm is used for decision making purpose. This algorithm gets values from sensor and analyses it and generate respective command.
- RASPBERRY PI 3 B Model (Used as a computer system)
Replacing Raspberry Pi 2 Model B, the third generation Raspberry Pi 3 has following specifications,
- A 1.2GHz 64-bit quad-core ARMv8 CPU
- 802.11n Wireless LAN
- Bluetooth Low Energy (BLE)
- 1 GB RAM
- 4 USB ports
- 40 GPIO pins
- Full HDMI port
- Ethernet port
- Combined 3.5mm audio jack and composite video
- Camera Interface (CSI)
- Display Interface (DSI)
- Micro SD card slot
- Video Core IV graphics core
Raspberry Pi receives support from simulink; this package allows us to develop algorithms that run standalone. Also the support package extends simulink with blocks to drive Raspberry Pi digital I/O and read or write data from them. Once created, simulink model can be simulated and the algorithm could be downloaded for standalone execution on wheelchair device. One useful and unique capability offered by Simulink is the ability to tune parameters live from Simulink model while the algorithm runs on the hardware.
2. 7" touch screen display for Raspberry Pi: The 7" touch screen display for Raspberry Pi is an 800x480 display that handles power and signal conversion and is connected via an adapter board. It requires basically two connections, power via Pi's GPIO port and connection to DSI port on Pi via ribbon cable. It supports 10 finger touch and on screen keyboard providing full functionality without any physical peripheral device.
C. Robotic Module
Furthermore, to control the movement of wheelchair based on commands it receive, an ARM 7 Microprocessor is integrated in system. Its specifications are,
- 32 bit RISC machine.
- Developed by NXP.
- 32 kB on chip memory.
- 512 kB on chip Flash memory.
- 64 I/O pins.
- Programmable using Kiel software.
The KEIL uversion3 is used here for compiling and debugging the program, wherein Embedded C is used to feed instructions to processor.
D. Design Flow
In this section of paper, workflow will be described giving step by step process about brain-controlled wheelchair. Initially, the NeuroSky headset 16 is turned on to gather neuro signals. As mentioned in section___ the EEG, dry, biosensor captures signals and sends to thinkGear technology for pre-processing the raw EEGdata. Further after analyzing, the digital signals are sent to MATLAB environment for computing and extracting the alpha and beta wave signals for classification. The Level analyzer technique is used to process the signal. The Eye blink and focusing level will be taken for analyzing the process. According to the level of the eye blink and focusing level, the corresponding interrupt will be sent to the processor via RF module. The two DC motors coupled with the processor controls the movement of the wheelchair. Each interrupt has a corresponding control operation like (Forward, Turn right. Turn left and stops... etc.)
The algorithm for our model will be as below,
- Start.
- Initialize the EEG headset and pair it with the Raspberry Pi using simulink.
- Then the values taken from this headset are given to the raspberry pi which is loaded with the MATLAB companion using simulink.
- This simulink companion takes the results and processes it using ThinkGear application in MATLAB.
- The results are in the form of frequencies in Hz.
- After taking the frequencies the main task in front of raspberry pi is to determine which signal is actually generated.
- The outputs are continuously monitored on the 7” display connected to it.
- The generated signal is compared and given to the ARM7 processor which is used to drive the wheelchair assembly.
- According to the input from raspberry the movement of wheelchair takes place.
- After whole process the system comes to an end.
- End.
III. RESULT
ARM 7 Processor act as a controlling core and RS232 communication act as a transmission medium for data transfer. The Personal computer is working as a signal-processing center by using MATLAB computing environment. Neurosky technology is used, to capture the neuro signals patterns from the user, where the single channel, dry, and biosensor located at the FP1 frontal lobe with minimal hair area. The delivered raw EEG signals have some noise and artifact's values. To communicate with Raspberry Pi, first Neurosky software needs to install on Raspberry Pi. After completing the installation, they ensure the connection and communicate with Raspberry Pi via RS232.
The function of Think gear technology allows the headset to measure the EEG signals and pre-process the signals. It removes the unwanted noise and artifacts from the packets of data, which obtain from the sensor. The sample training signals are to be taken from the buffer and pre-processed for extracting the Alpha and Beta (focusing and Eye Blink) signal. They applied, the Level Analyzer Technique for each of these patterns and categorize the signal according to the described condition level for eye blink and focusing or attention. The entire process is done on MATLAB.
The output is sent in the form of interrupt from MATLAB to Microprocessor via serial modules like RS232. The output is sent from Raspberry to RS232 through the serial data converter. The Robotic platform consists of ARM 7 Microprocessor coupled with four DC motors for wheelchair movement. The receiver side RS232 connects with Processor by UART for sending the collected output to the processor. The direction of the wheelchair will be controlled by the reception of the interrupt value. Each interrupt has its own control function and depending on the arrival of interrupt value the operation will be changed. The impaired people can control their wheelchair by EEG based technology without any complexity. It gives the quality of life to the disabled people with independent of wires and provides enhanced portability, free motion, wearable with low power consumption. Figure 8 shows the experimental setup.
Conclusion
An EEG-based Brain-controlled wheelchair was devel¬oped for physically disabled people enabling them to live independent normal mobility. Two methods were proposed. For the forward movement the attention signal was used and for controlling operations like start/stop eye blink was used. The performance based on various metrics was analyzed. The Neuro sky technology has been used for development of wheelchair model based on EEG. For implementing signal processing level analyzer technique was implemented and for controlling wheelchair ARM 7 Microprocessor was used. It can assist physically disable people to do work without any human interaction and hence enrich life standard. The wheel-chair shall be further enhanced by removing artifacts and noise level precisely in signal processing and focus on additional improvement of the detection of irregular eye blink so that, the wheelchair can be properly controlled without colliding with any obstacle.
References
[1] WHO. Disability and health: World Health Organization WHO; 2019 [Available from: http://www.who.int/mediacentre/factsheets/fs352/en/. [2] https://sapienlabs.org/what-does-the-eeg-signal-measure/https://www.researchgate.net/publication/329267021_Design_of_an_EEG-Based_Brain_Controlled_Wheelchair_for_Quadriplegic_Patients [3] Arduino Support from Simulink - Hardware Support - MathWorksRaspberry Pi Support from Simulink – MathWorks [4] Brain Controlled Wheelchair: A Smart Prototype Muhammad Ahsan Awais, Mohd Zuki Yusoff, Norashikin Yahya, Sheikh Zeeshan Ahmed and Muhammad Umair Qamar
Copyright
Copyright © 2022 Gagandeep Singh Siledar, Prof. Sarita Verma. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET39224
Publish Date : 2021-12-02
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online