

Ijraset Journal For Research in Applied Science and Engineering Technology
Brain Tumor Detection Using Image Processing and Machine Learning Algorithms
Authors: Vaibhav Pol, Prof. Akshada Dighe, Vaishnavi Kulkarni, Harshali Agarwal, Shreeya Sapate, Akshada Shingote
DOI Link: https://doi.org/10.22214/ijraset.2022.42478
Certificate: View Certificate
Abstract
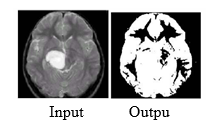
The purpose of this paper is to implement a Simple Algorithm to detect the range and shape of a brain tumor in MR images. There are many types of tumors, all of which are uncontrolled growths of tissues in any part of the body. Tumors are classified according to their types and they are treated differently according to their characteristics. It is well known that brain tumors are inherently dangerous due to their location within the skull\'s limited space (the intracranial cavity). According to the majority of research done in developed countries, people who die due to brain tumors are often mistakenly diagnosed. Generally, Imaging of the brain produced by CT scans or MRIs directed into the intracranial cavity is considered complete. During visual examination of this image by the physician, a brain tumor is detected & diagnosed. However, this method of detection limits the ability to accurately determine the stage & size of the tumor. To avoid that, by combining two algorithms, this study uses computer-aided segmentation (detection) of brain tumors as a means of avoiding that issue. Through the use of this method, tumor tissues can be segmented with similar accuracy and reproducibility as that achieved through manual segmentation. This method can also reduce the analysis time. As a result, a tumor is extracted from the MR image and its location and shape determined, and the tumor\'s stage is calculated from the amount of area calculated from the cluster.
Introduction
I. INTRODUCTION
The paper discusses the concept of automated brain tumor segmentation based on MRI, which usually help to view the anatomy of the brain. The MRI scan is used for the entire process in this paper. A CT scan is less comfortable for diagnosis than a MRI scan. It does not affects the human body in anyway. Because it doesn't use any radiation. It is generally uses the magnetic field and radio waves for the MR image. In the field of brain tumor detection, various kinds of algorithms have been developed. However, they might have some limitations in terms of detection and extraction. In this project, mainly two algorithms are used for segmentation process. Therefore, it gives the accurate result for tumor segmentation. Tumor is because of the uncontrolled development of the tissues in any piece of the body, The growth might be essential or auxiliary, If it is a beginning, then, at that point, it is known as essential. Assuming that the piece of the growth is spread to somewhere else and developed similar to claim then it is known as auxiliary. Regularly cerebrum growth influences CSF (Cerebral Spinal Fluid). It foundations for strokes. The doctor gives the treatment for the strokes as opposed to the treatment for growth. So identification of growth is significant for that treatment. The lifetime of the individual who impacted by the mind growth will increment in the event that it is recognized at current stage. That will expand the lifetime around 1 to 2 years. Typically cancer cells are of two sorts. They are Mass and Malignant. The recognition of the dangerous cancer is fairly hard to mass growth. For the exact discovery of the harmful cancer that needs a three dimensional portrayal of cerebrum and three dimensional analyzer instrument. In this paper we zeroed in on discovery of mass growth detection. The creating stage for the recognition is mat lab. Because it is not difficult to create and execute. Toward the end, we are giving frameworks that identify the growth and its shape.
II. EXISTING METHOD
The current technique depends on the thresholding and locale developing. The it was overlooked the to thresholding strategy spatial attributes. Ordinarily spatial qualities are significant for the threatening cancer discovery. In the
it is considered to thresholding based division the picture as having just two qualities either dark or white. However, the bit map picture contains 0 to 255 dark scale values. So at times it overlooks the growth cells too. If there should be an occurrence of the area developing based division it needs more client connection for the choice of the seed. Seed isn't anything in any case, the focal point of the cancer cells; it might cause power in homogeneity issue. And furthermore it won't give the OK outcome for every one of the pictures. The ordinary result for the thresholding is given beneath.
III. PRAPOSED METHOD
The proposed framework has for the most part four modules: pre-processing, segmentation, Feature extraction, and approximate reasoning. Pre-processing is finished by separating. Segmentation is completed by cutting edge K-implies and Fuzzy C-implies calculations. Highlight extraction is by thresholding lastly, Approximate reasoning strategy to perceive the growth shape and position in MRI picture utilizing edge location technique. The proposed strategy is a mix of two calculations. In the writing overview numerous calculations were created for division. Yet, they are not really great for a wide range of the MRI pictures.
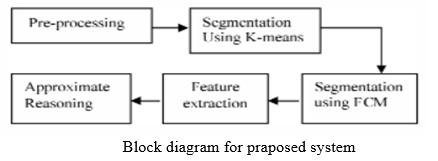
The above picture is the block diagram for proposed framework. It involves the blend of two calculations for division. The proposed strategy comprises of five modules. Each module and its capacity will be made sense of underneath.
IV. PRE-PROCESSING
As per the need of a next level the pre-processing step convert the picture. It performs sifting of commotion and different antiques in the picture and honing the edges in the picture. RGB to dim change and Re-shaping likewise happens here. It incorporates middle channel for commotion evacuation. The conceivable outcomes of appearance of commotion in present day MRI examine are exceptionally less. It might show up because of the warm impact. The primary point of this paper is to identify and portion the cancer cells. However, for the total framework it needs the course of commotion expulsion. For better comprehension the capacity of middle channel, we added the salt and pepper noise artificially and removing it using median filter.
V. CLUSTERING USING K-MEANS ALGORITHM
A. K-Means Clustering
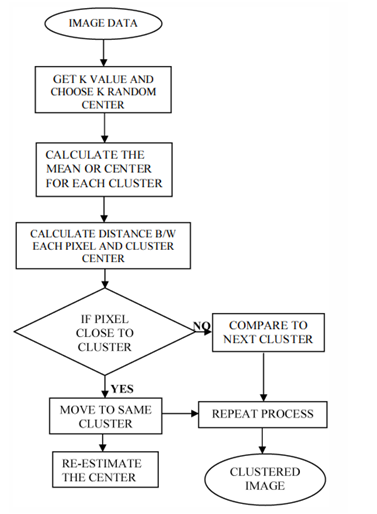
Clustering an image is grouping the pixels according to specific characteristics. And here the unsupervised machine learning algorithm K-Means is used for clustering. To use the k-means algorithm, first we must define the number of clusters of k. Then the k-cluster centers are chosen randomly. Next, the distance between each pixel and each cluster center is calculated. The distance can be of regular Euclidean function. Using the distance formula, a single pixel is compared to each cluster center, and then the pixel is shifted to the cluster that has the shortest distance. The Centroid is then recalculated. Every pixel is once again compared to all centroids. The process continues until the center converges
.A. Algorithm for K-means Algorithm.
- Take the input "no of cluster value" as k.
- The k cluster center is randomly chosen.
- Then, calculate mean or center of the cluster.
- Distance is calculated between each pixel to each cluster center.
- If the distance is near to the center then the control is moved to that cluster.
- Otherwise move to next cluster.
- Re-estimate the center.
- The process is repeated until the center doesn't moves.
C. Flowchart for K-Means Algorithm.
???????D. Output for K-means
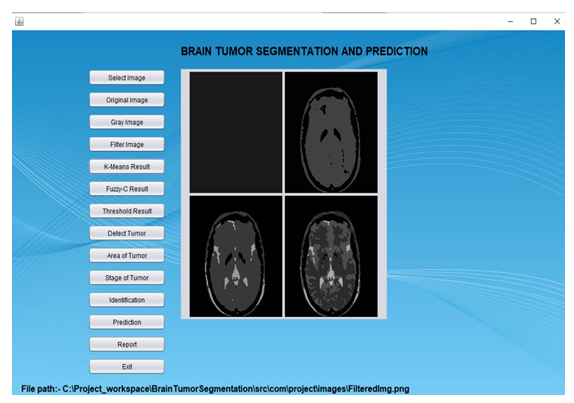
This MR image is used as an input to the pre-processing and K-means algorithms. Here 0.02% of salt and pepper noise is added and that has been removed using the median filter. With K-means, the image is clustered based upon some characteristics. The figure shows the result of the K-Means algorithm using five clusters. The tumor is extracted at the fifth cluster.
VI. SEGMENTATION USING FUZZY-C MEANS
A. Fuzzy-C Means
The fuzzy logic is an approach to handling the information by giving the incomplete participation worth to every pixel in the picture. The enrollment worth of the fuzzy set goes from 0 to 1. fuzzy clustering is fundamentally a multi esteemed logic that permits middle qualities i.e., individual from one fuzzy set can likewise be individual from other fuzzy sets in a similar picture. There is no unexpected change between full participation and non enrollment. The participation work characterizes the fuzziness of a picture and furthermore to characterize the data contained in the picture. These are three fundamental essential highlights engaged with portrayed by participation work. They are support, Boundary. The center is a completely individual from the fuzzy set. The help is non enrollment worth of the put down and limit is the transitional or halfway participation with esteem somewhere in the range of 0 and 1.
???????B. Output for Fuzzy C- Means.
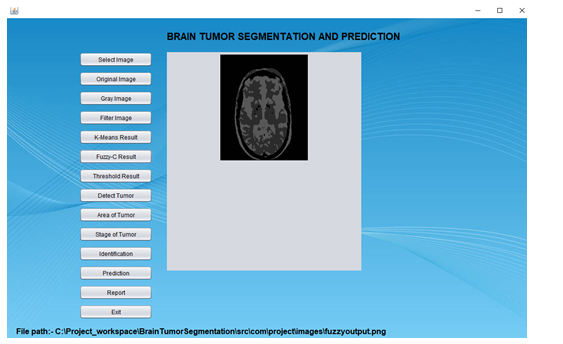
The above image is the output for Fuzzy C Means process. The mian reason to develop it is, for the accurate prediction of tumor cells which are not usually predicted only by K-means algorithm. It results into the accuracy than compared to the K-Means.
VII. FEATURE EXTRACTION (TUMOR DETECTION)
At the FCM output, the feature extraction is used to extract the cluster that shows the predicted tumor. The extracted cluster is then further forwarded to the thresholding process. It applies binary masks for the entire image. It is used to make the dark pixel more darker and white pixel brighter. In threshold coding, each transformed coefficient is compared with the threshold. If it is less than the thresholded value then it will be considered as zero. If it is larger than the threshold, it is considered as one. Thresholding is an adaptive method in which only those coefficients whose magnitudes are above a certain threshold are retained within each block. Suppose we have an image 'f that has a gray level of k, and a threshold value T that is within the gray scale range of k.
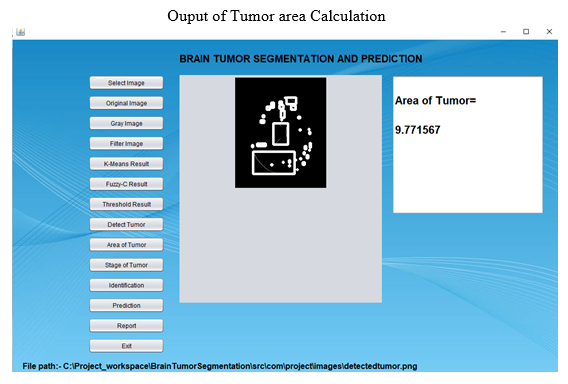
(output image of tumor detection)
The white part is the extricated tumor shape from the given picture utilizing the Fuzzy C-Means calculation. The un-predicted tumor cells in the K-means calculation can additionally be tracked down utilizing the Fuzzy C-Means calculation.
VIII. ALGORITHM (PROJECT)
The Algorthmic steps of the Brain Tumor Detection using clustering and segmentation algorithms:
- Step 1: Login using the credentials.
- Step 2: Get the original MRI scaned images as an input.
- Step 3: Noise is removed from image.
- Step 4: Image filteration is done.
- Step 5: Thresholding process is applied on it.
- Step 6: K-Means algorithm is used for clustering.
- Step 7: Image is segmented using Fuzzy-c Means segmentation algorithm.
- Step 8: Tumor is detected and location is displayed.
- Step 9: Stage is predicted (high risk, low risk, healthy image).
- Step 10: Area is calculated of tumor.
- Step 11: Patient report is generated.
 ???????
???????
Conclusion
There are various sorts of growths are accessible. They might be as mass in mind or dangerous over the cerebrum. Assume on the off chance that it is a mass, K-implies calculation is sufficient to remove it from the synapses. In the event that there is any commotion are present in the MR picture it is eliminated before the K-means cycle. The clamor free picture is given as a contribution to the k-means and growth is removed from the MRI picture. And afterward division involving Fuzzy C means for exact growth shape extraction of dangerous cancer and thresholding of result in include extraction. At long last surmised thinking for computing growth shape and position estimation. The exploratory outcomes are contrasted and different calculations. The proposed strategy gives more precise outcome. In future 3D evaluation of cerebrum utilizing 3D slicers with matlab can be created.
References
[1] S. Zulaikha BeeviM, Mohamed Sathik(20IO). \"An Effective Approach for Segmentation of MRI Images:Combining Spatial Information with Fuzzy C-Means Clustering,\" European Journal of Scientific Research, ISSN I450-2I6X Vol. 41 No.3 pp.437-45IJ. [2] A. Suman Tatiraju,july-2008, \"Image Segmentation using k-means clustering, EM and Nonnalized Cuts,\" Symposium of Discrete Algorithms [3] D. Van De Ville, M. Nachtegael, D. Van Der Weken, E.E. Kerre, W. Philips, I.Lemahieu(2003), \"Noise reduction by fuzzy image filtering,\" IEEE Transactions on Fuzzy Systems I. [4] T. Kanungo, D. M. Mount, N. Netanyahu, C. Piatko, R. Silverman, & A. Y.Wu (2002) , \"An efficient k-means clustering algorithm: Analysis and implementation\", Proc. JEEE Con! Computer Vision and Pattern Recognition, pp.881-892. [5] M. Masroor Ahmed & Dzulkifli Bin Mohammad(2010), \"Segmentation of Brain MR [mages for Tumor Extraction by Combining Kmeans Clustering and Perona-Malik Anisotropic Diffusion Model,\" International Journal of Image Processing, Volume (2) : Issue(I) 27 \\
Copyright
Copyright © 2022 Vaibhav Pol, Prof. Akshada Dighe, Vaishnavi Kulkarni, Harshali Agarwal, Shreeya Sapate, Akshada Shingote. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET42478
Publish Date : 2022-05-10
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online