

Ijraset Journal For Research in Applied Science and Engineering Technology
Camouflage Robot for Military Application
Authors: Manasa S, Nisarga J P, Preksha S, Ruchitha M, Yashaswini R
DOI Link: https://doi.org/10.22214/ijraset.2023.50465
Certificate: View Certificate
Abstract
This paper presents a modern approach for surveillance at remote and border areas using multifunctional robot based on current IOT technology used in defense and military applications. This robotic vehicle has ability to substitute the soldier at border areas to provide surveillance. The robotic vehicle works both as autonomous and manually controlled vehicle using internet as communication medium. This multisensory robot used to detect human, bombs, harmful gases at remote and war field areas. Conventionally, wireless security robot is obsolete due to limited frequency range and limited manual control. It can eliminate the need of deploying humans at hostile conditions at all the times. Moreover, in case if something suspicious is detected by the system, it must be able to take the necessary decisions and hence actions along with issuing alert messages for the human controllers. This robotic vehicle is designed for reconnaissance as well as surveillance under certain circumstances.
Introduction
I. INTRODUCTION
Robots are mechanical devices, that are capable of performing the difficult and complex tasks on their own and also based on the commands. Ensuring security across border region is considered as an important aspect for any country. It provides protection to the country at the same time it incurs huge expenses for a country. Many systems are developed by researchers to provide a solution for efficient monitoring of borders.
Defence system is a major asset to any country in this world. Safeguarding the country against the enemies is one of the prioritized things to keep the country’s economy, assets, valuable treasures and lives of the people in a safest way. In the defence the most required and the new equipment are the military robots. Society is aware of the military employment of robots today. The last decade has witnessed a surge of military robots on the battlefield. The proposed model utilizes the different sensors like PIR sensor, IR sensor, and metal detectors for different operations as robots are speed and their capabilities, strengths and calculations are very efficient. The technology has grown in such a way that the robots can be operated wirelessly and can be operated in remote areas, human loss can be minimized in the defence, surgical strikes and military operations which leads to less human loss. Using the camouflage principle, we able to build a robot which can act as spy and can deliver the particular location and the images of trespassers.
II. LITERATURE SURVEY
According to the survey, the reviewed systems used color detection sensor which requires the object to be really close in order to detect the color of the object.
This creates a range issue for the system. Metal & gas detectors were used in some systems, but to keep the weight and complexity of this system low both the metal and gas detectors are neglected. The aim of engineering camouflage is to make detection and recognition of target difficult by adapting to the visual conditions of the environment. [3] The camouflaging feature makes it difficult to detect the robot by unaided human eye.
The color sensor detects the color of surrounding surfaces & determines the color of surrounding. The robot can only implement primary (RGB) color. [2] The robot helps military forces to improve the security measures by providing additional surveillance to the remote locations which exhibits harsh environmental conditions. The robot can also be used in high altitude areas where human cannot survive. There is scope to improve the system by configuring it with multicolor camouflaging. [1]
III. PROPOSED SYSTEM
A Camouflage army robot is designed in such a way that it can reproduce the color independently at various areas with specific spots of the ground surface which allows the robot to mock up as a checkerboard of multiple colors i.e, the various colors it drives over. In the implemented system the movement of the robot can be controlled in any required direction using and smart phone which receives the information from the sensors and camera.
IV. METHODOLOGY
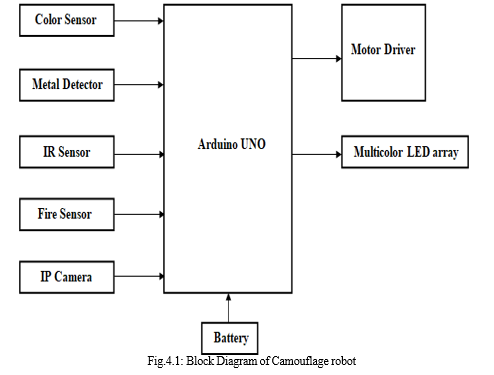
The main processor used in the proposed system is Arduino UNO, which is a microcontroller board based on the Microchip ATmega328P. PIR (passive infrared sensor) or PID (passive infrared detector) is used which measures infrared light radiating from objects in its field of view by detecting the movement/motion of living things. This sensor works on reflection and radiation properties. A metal detector is used for finding metal inclusions hidden within objects, metal objects buried underground and also for detecting the presence of nearby metallic devices such as bombs and guns. The color sensor employed detects the color of the ground, usually in the RGB scale. A fire sensor or a flame detector is used to detect and respond to the presence of a flame or fire. Fire detection is based on heat sensing most, current fire detection system uses electronic and distributed optical thermal detectors based on thermistors. Thermal sensing based on infrared is a helpful technique, especially appropriate for thermal detection of the targeted location. A DC motor which is a class of rotator electrical machine is employed and that converting direct current to mechanical energy. Here 2 DC motors are used for the movement of the robot which is controlled via mobile (Android application).
For the software implementation, we have used Arduino IDE in the proposed system to program the Arduino UNO board. An integrated development environment (IDE) is a software application that provides comprehensive facilities to computer programmers required for software development. It generally consists of source code editor built-in automation tools and a debugger. The Arduino IDE supports C and C++ languages using special rules of code structuring. Here the robot movement and other sensor data values are displayed in mobile application. For the purpose of live streaming wireless IP address based Wi-Fi camera is used. The live streaming can be viewed on a smartphone by making use of an android application V380.
This robot has a Bluetooth receiver unit, which receives the commands and give it to the microcontroller circuit to control the motors. The microcontroller then transmits the signal to the motor driver IC’s to operate the motors. Bluetooth devices communicate using low power radio waves on a frequency band between 2.400 GHz and 2.483 GHz.
V. SYSTEM DESIGN
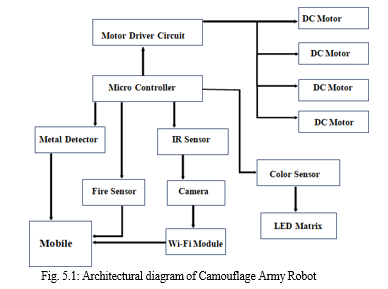
System design is the process of defining the architecture, components, modules, interfaces, and data for a system to satisfy specified requirements. Systems design could be seen as the application of systems theory to product development. System architecture is a conceptual model that defines the structure and behavior of the system. It comprises of the system components and the relationships describing how they work together to implement the overall system.
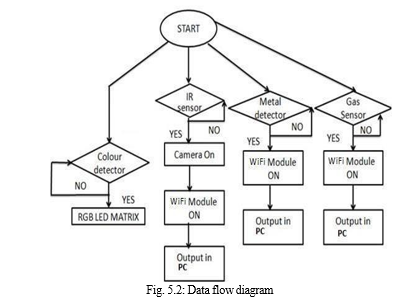
A data flow diagram is a graphical representation of the "flow" of data through an information system, modeling its process aspects. A DFD is often used as a preliminary step to create an overview of the system without going into great detail, which can later be elaborated. DFDs can also be used for the visualization of data processing. A DFD shows what kind of information will be input to and output from the system, how the data will advance through the system, and where the data will be stored. It does not show information about the timing of process or information about whether processes will operate in sequence or in parallel unlike a flowchart which also shows this information. Fig 5.2 represents the data flow diagram of the camouflage army robot. It contains four sensors. An obstacle sensor, PIR sensor, Color sensor, Metal detector and fire sensor. In the course of robot movement if any obstacle is sensed then first it detected the color by using color sensor and that particular color is displayed in the RGB color matrix. If any human comes that is detected by PIR sensor and as soon as the human is detected camera turns on and that particular video is sent to android app.
VI. RESULTS
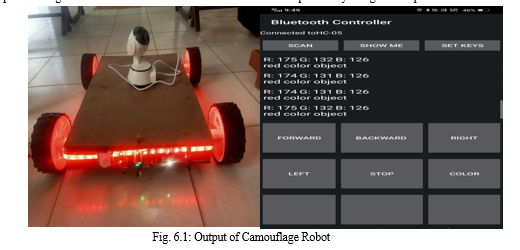
An Army Robot with Camouflaging feature is designed and manufactured as shown in below figure. When IR sensor detects the obstacles, the alert message is sent to android app. When Metal detector detects the metal, the respective buzzer will produce the sound and information sent to the android app. The color sensor senses the color from the surrounding environment of the robot and make changes according to it by framing the color on the LED strips. Fire sensor detects the fire. The camera shows real time data that can be processed or viewed at the monitor or mobile phone of the user. It gives the fast and accurate data as the transmission of data takes place through the Wi-Fi module. The robot movement can be operated by using mobile phone.
VII. FURTHER MODIFICATION
- Adding more sensors to enhance application.
- In future we can add anti- jamming technique to control the robot efficiently.
Conclusion
The proposed system provides a helping hand to our security forces in detection of intruders. Previously implemented systems used components such as color sensors which had their own drawbacks. This system makes use of a better camera for color detection and a 8-bit processor which improves the performance of the system by a significant amount, eliminating the drawbacks of previously implemented systems. Moreover, the camouflaging feature makes it difficult to detect the robot by naked human eye. Thus, the robot will change its color according to surrounding surfaces & can be easily hidden from enemies. The robot is also equipped with camera which will help the user to keep eye on enemy territory & to be controlled from remote location wirelessly. If any obstacle is detected, the user will be notified & robot will stop moving.
References
[1] A. M. Siddek, “Depth-level based camouflaging using RGB-D sensor,” 2017 IEEE International Conference on Systems , Manand Cybernetics(SMC) ,Banff ,AB,pp.2349- 2354,2017. [2] Ghanem Osman Elhaj Abdalla and T Veeramanikandasamy “Implentation of Spy Robot for A surveillance Systems using Internet Protocol of Raspberry Pi” 2017 2nd IEEE International conference On Recent Trends In Electronics Information & Communication Technology , May 19-20,2017, India. [3] “Integrated IOT based design and Android operated Multi-Purpose Field Surveillance Robot for Military Use” 1M. Ashok kumar, 2Dr.T. Thirumurugan Department of Electronics and Communication Engineering IEEE 2018. [4] “A survey in adaptive hybrid wireless Sensor Network for military operations” Wichai Pawgasame IEEE 2019. [5] “A Novel Approach for Border Security; Surveillance Drone with Live Intrusion Monitoring” Ekra Bin Syed Mojib; A.K.M. BahalulHaque; Md. NafisRaihan; Mahbubur Rahman; Fahad Bin Alam2019 IEEE International Conference on Robotics, Automation, Artificial-intelligence and Internet-of-Things (RAAICON) Year: 2019| Conference Paper | Publisher: IEEE. [6] Neha Bhadwal ,Vishu Madaan ,Prateek Agarwal ,Awadhesh Shukla and AnujKakran ,”Smart Border Surveillance System using Wireless Sensor Network and Computer Vision”, Date of Conference: 2426 April 2019 ,Date Added to IEEE Xplore: 29 July2019. [7] “Development of a Framework for Effective Surveillance and Human Intrusion Detection in Border regions covered with Dry leaves” D Arjun; P K Indukala; K A UnnikrishnaMenon2020 Fourth International Conference on Inventive Systems and Control (ICISC) Year: 2020 | Conference Paper | Publisher: IEEE. [8] “Desgin of IOT Based Multifunctional Camouflage Military Robot” P. Kavipriya; G Jagan: Edara Venkat; Deevi Nikhil Ranganadh; Year: 2021 | Conference Paper | Publisher: IEEE.
Copyright
Copyright © 2023 Manasa S, Nisarga J P, Preksha S, Ruchitha M, Yashaswini R. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET50465
Publish Date : 2023-04-15
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online