

Ijraset Journal For Research in Applied Science and Engineering Technology
CLEAN SWEEP: The Floor Cleaning Robot
Authors: Ayushman Shukla, Kaushiki , Prabhat Gaurav, Rishabh Kumar
DOI Link: https://doi.org/10.22214/ijraset.2022.45414
Certificate: View Certificate
Abstract
Modern households are getting increasingly automated and intelligent. Home automation makes life more convenient and gives individuals more free time. Domestic robots are becoming more prevalent in homes and in people\'s daily lives, yet the market is still young and in its infancy. But a rise is anticipated, and the use of household robots is changing. There are many robotic vacuum cleaners on the market, but very few of them wet-clean floors. This project\'s goal is to create and use a vacuum robot with two cleaning modes. Through a phone application, autonomous and manual modes are available. Instead of using a manual vacuum, a robot vacuum cleaner is designed to make cleaning easier. This project\'s goal is to build and put into action a vacuum robot with two cleaning modes: autonomous and manual, the latter of which may be accessed via a phone application.
Introduction
I. INTRODUCTION
Robots are intelligent devices that manage their own neural networks using laptop principles, so they can perform tasks in accordance with calculations. The main regulator envisaged directs the independent evolution of cars. Robots have a significant role in every aspect of life. It is employed by businesses, families, and foundations. The robots are only now beginning to become as intelligent as humans. A typical human uses two to three robots daily in his way of life, for the most part. The following are many advanced mechanical components: Actuators Sensors devices for mechanical management, such as valves.
In order to save time, a house cleaning automaton was required, which is an automatic system that operates and cleans without human control or involvement. It simultaneously executes sweeping and scouring jobs, detects obstacles, and also includes an automated water spray. Features of Floor Cleaning Robot:
- Robotic vacuums are quite simple to use.
- Operation With No Hands.
- Easy to maintain.
- Establish a cleaning schedule.
- It helps you save time and effort.
- Wi-Fi accessibility.
- Capable of handling small spaces
II. PROBLEM STATEMENT
Nowadays, people lead hectic lives. People in metropolitan areas work odd and unusual hours. An individual will continually find ways to save time in such a situation. It can be challenging for career-driven and capable women to balance family and work. Typically, the hand is used as the primary instrument for wet or dry wiping to clean floors. They should be superficially hard scrubbed. The cleaning module includes cleaning of various surfaces, including marble or concrete floors with fine finishes. The heavy residue that covers the rough surface areas, like concrete floors, makes cleaning more time-consuming.
III. PROPOSED SOLUTION
The following are the project's goals:
- To recognise and avoid obstacles automatically.
- To put the dust in the vacuum to gather it.
- Using an app to operate the robot
- Mopping the floor while vacuuming is being done.
Our major goal is to create an automatic floor cleaner that can go through tight spaces and big floor areas with ease using a straightforward programme. It will collect a lot of dirt as it moves over the area thanks to the sweeper it has installed. To create a floor-cleaning robot that doesn't require human interaction while using the internet of things to establish an autonomous robotics system. It is typically employed when there are fewer obstacles and a vast area needs to be cleaned. Most issues arise on huge floors, which are beyond human capacity. It implies that people can become exhausted on broad floor surfaces.
IV. LITERATURE REVIEW
Traditionally, a dry mop or wet mop is used to clean the floor, with the hand serving as a potential tool. They must scrape the surface vigorously. Cleaning comprises polishing various surfaces, primarily marble, highly polished wood, and cement floors. Among these floors, the cement floors with their rough surfaces, which are primarily found in semi-urban regions, are heavily dusted. There have been designed intricate pneumatic and actuation systems. The mobile phone is among the best examples. When it comes to floor cleaning robots, iRobot is clearly the industry leader with their 90 sq. cm robot that uses indoor navigation as its primary control method. Indoor navigation is a major problem for many domestic mobility robots. Indoor GPS is also in development right now; it uses unsupervised learning and chooses its course on the first try.
- Recently, the market has seen an increase of creative cleaning robots. In their work, "Design and development of floor cleaning robot," Manreet Kaur and Preeti Abrol used both automatic and manual cleaning modes. For wireless communication between the robot and remote control with a 50m range, they used RF modules. When operating in automated mode, the robot manages all tasks on its own, changes lanes when obstacles are detected, and then reverses direction. In manual mode, the robot is controlled and the desired task is carried out via the keyboard. This model's disadvantage is that it lacks the self-charging feature.
- Modern households are getting increasingly automated and intelligent. Home automation makes life more convenient and gives individuals more free time. Domestic robots are becoming more prevalent in homes and in people's daily lives, yet the market is still young and in its infancy.
- This study has provided a thorough assessment of the technical benefits that have aided a variety of real-world situations. For the convenience of the majority of the population, who are quite busy with their duties. The project is now necessary due to the hectic schedule of working in the corporate sector. As a result, the idea of creating an autonomous vacuum cleaner has emerged. The study includes an automated vacuum cleaner with parts like DC motor-driven wheels, a roller brush, a cleaning mop, a trash can, and an obstacle avoidance sensor. As a power source, a 12V rechargeable battery is employed. Additionally, there are compresses that use a unique UV germicidal cleaning approach. The study was conducted with consideration for the product's economic cost.
V. SYSTEM COMPONENTS
A. Software
A single-board microcontroller called the Arduino is designed to make it easier to apply interactive objects or settings. An open-source hardware board built on an 8-bit Atmel AVR or 32-bit Atmel ARM microprocessor serves as the hardware. The user can attach different expansion boards with the use of the 14 digital I/O pins, USB interface, and 6 analogue input pins found on current models. It was first presented in 2005 at the Interaction Design Institute Ivrea in Ivrea, Italy, with the goal of providing students with a quick and affordable approach to develop interactive things. It includes a straightforward Integrated Development Environment (IDE) for building applications for Arduino using a combination of basic Java and C or C++ on standard personal computers. Users simply need to define two functions for their cyclic executive programme to be executable:
- setup (), which can establish settings, is a function called once at the beginning of a programme.
- loop (): a procedure that is used till the board shuts down.
A typical C++ compiler won't recognise the preceding code as a legitimate programme; therefore, the code is written to a temporary file with an additional header at the top and a main () function at the last to make it a legitimate C++ programme when the user selects the "Upload to I/O Board" button in the IDE. The AVR Liby and GNU tool chain are used by the Arduino IDE to compile programmes, while Arduino is used to upload programmes to the board. The Arduino platform employs Atmel microcontrollers, hence software for the Arduino can also be created using Atmel's development environments AVR Studio or the more recent Atmel Studio.
B. Hardware
- Arduino Uno Microcontroller
- LDR Module
- Switch
- 7805 Voltage Regulator
- DC Motor
- Relay
- Soldering Iron
- Soldering Wire
- Zero PCB
- Connecting Wire
C. Arduino Uno Microcontroller
An ATmega328-based microcontroller board is the Arduino Uno. It has 16 MHz ceramic resonator, 6 analogue inputs, 14 digital input/output pins (of that which 6 could be used as PWM outputs), a USB port, a power jack, an ICSP header, and a reset button. Different microprocessors and controllers are used in the designs of Arduino boards.
D. LDR Module
A device whose resistance is occupied by the incident electromagnetic energy is known as a light dependent resistor. They are therefore light-sensitive gadgets. They may also be referred to as photoconductive cells, photoconductors, or just photocells. They are constructed of highly resistant semiconductor materials.
The LDR won't produce an output when given voltage as input and no light is shining on it.
However, the output will be produced as soon as the voltage is applied and light is shining on the LDR. As the name implies, the resistance of a light-dependent resistor depends on the presence of light. Behind this is the theoretical underpinning of the light sensor, which serves as the circuit's darkness detector.
An LDR is a resistor that has a resistance (variable) that varies depending on the amount of light being sensed. Simple photodetectors called LDRs, light dependent resistors, or photo-resistors are frequently employed with LED circuits. The resistance between both the terminals is considerable in the dark, reaching about 1 M. At high brightness, the resistance decreases with cumulative light levels to either a few hundred ohms.
E. DC Gear Motors
A DC motor is a device that transforms electrical current (DC) into mechanical force. A current-carrying conductor receives a mechanical force when it is exposed to a magnetic field, which is the basis for the device's operation. DC motors feature a rotating armature winding, but not a rotating magnetic field, and either a permanent magnet or a stationary field winding. various links between the field and different features for speed/torque regulation are provided by armature winding. A DC motor's speed can be altered by altering the field current or the voltage delivered to the armature.
F. Relay Module
Relays are switches that are controlled by electricity. While solid-state relays are one type of working principle, many relays use an electromagnet to mechanically operate a switch. Relay’s safeguard the electrical system and reduce damage to connected equipment from over currents and over voltages.
The relay is used to protect the equipment that is linked to it.
These are also utilised in applications such as audio amplifiers and some varieties of modems to control high voltage circuits with low voltage signals. These are utilised in applications like starter solenoids in automobiles to control a high current circuit by a low current signal. These are capable of identifying and isolating faults in the power transmission and distribution system.
The following are examples of typical applications for the relays:
- Lighting control systems
- Telecommunication
- Controls for industrial processes
- Traffic management
- Motor drives control
- Electrical power system protection measures
- Interfaces of computer
- Automotive
- Home equipment
VI. IMPLEMENTATION
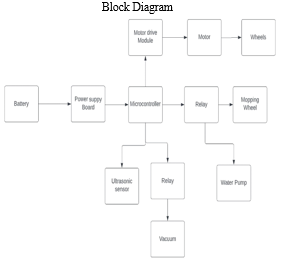
A. Workflow Description
A control system is put in place to guarantee the robot's autonomous movement. Infrared sensors, a motor controller, and an on-off control scheme were employed to give the robot the necessary feedback regarding the borders of the PV panels. As a result, the robot halts just shy of the panel's edge. The obtained data from the infrared sensors were processed using the mode filter. The robot pauses before reaching the panel edge once the reading from the fused sensors exceeds a predetermined threshold.
B. Results and Discussion
- When the robot is turned on, it is in manual mode, where the user can use Bluetooth to link it to his phone and choose how to control it.
- The robot is forced into automatic mode and is made to move in a "S" pattern by modifying the status of the mode selection switch.
- Suction or drip units can be turned on or off depending on the type of cleaning that is needed, such as dry or wet cleaning.
- It was noted that the robot cleaned pretty effectively, with an efficiency level of about 80%.
VII. PERFORMANCE ANALYSIS
A. Benefits
- Used for remote sensing and cleaning in factories and industries.
- Used to regulate and clean household appliances.
- Long-range remote sensing.
- The ability to switch to autopilot from ground station by broadcasting a specific frequency.
- Long-range remote sensing.
B. The following drawbacks exist
- Not at all effective if there is no network.
- Call fees.
- Frequent headphone damage.
- Expensive.
- Surface dependent.
VIII. FUTURE SCOPE
At this time, the current system is primarily intended for supervisory applications. The robot can be sent to a suspected area, and if it detects any smoke or gas, it will sound an alarm and notify the operator. The region where the robot moves can also get remarks from the operator. To increase the number of comments made to the robot, the key board can also be connected to a TV that is attached to the receiving side. To transmit remarks directly from the remote mobile through the mobile interface with the robot, an amplifier must be connected to the speaker of the mobile. The aforementioned system is also suitable for use in the military for bomb detection and as a spy robot.
IX. ACKNOWLEDGEMENT
It is with great pleasure, we extend our gratitude and thanks to Dr. CPS Prakash, Principal, Dayananda Sagar College of Engineering, for his encouragement throughout the project.
We express our sincere thanks to Dr. P. Usha, Professor and HOD, Department of Electrical and Electronics Engineering, for providing the facilities required for the completion of this project.
Before we start the report of our project, we would like to express our gratitude towards the people without whom this project would not have been possible. We express our heartfelt gratitude and indebtedness to Prof. Sharath Kumar YN, Assistant Professor, Department of Electrical and Electronics Engineering, for his treasured guidance, unremitting assistance, and in critical assessment of this project.
We fell short of words to express our heartfelt thanks to all our family members and friends and all those who directly or indirectly helped us during our course.
Conclusion
In the fields of robotics and floor cleaning, the produced product is unquestionably highly significant. The vacuum pumps used in the developed robots cause a lot of vibration and power loss in the system. Additionally, the algorithm used is not very efficient. Therefore, there is currently need for improvement and optimization till the best possible product is created. The algorithm will be a terrific product and have the potential to change this market after it has been improved and converted to heuristic-based search like the bee algorithm. Without a doubt, it has enormous potential. Additionally, we can utilize just one vacuum pump rather than two, which will result in a more affordable and energy-efficient product with less vibration and greater robot control. The 33*30*8 cm robot is extremely small and can fit underneath any piece of furniture or bed. Additionally, this is incredibly portable and useful. The robot\'s scrubber is now made out of tiny plastic fibres. However, it can be further enhanced so that 90% of the scrubber\'s surface area will make touch with the floor. The proposed work offers obstacle detection in the event that any stand in the route. For the user\'s convenience, a water sprayer that automatically dispenses water for mopping is attached. With the use of a smartphone, the user can also control this robot manually. It provides effective cleaning while also lowering labour costs and saving time. The robot is self-sufficient when operating in automatic mode. Automatic processes include sweeping, mopping, and modifying the path when a hurdle is present. However, there are still fresh concepts for enhancing the created system and including new features in it.
References
[1] P.S. Adithya, R. Tejas, V. Sai Varun and B.N. Prashanth;International Conference on Advances in Materials and Manufacturing Applications (IConAMMA-2018) 16–18 August 2018, Bengaluru, India (https://iopscience.iop.org/issue/1757-899X/577/1 ) [2] Jaeseok Kim, Anand Kumar Mishra, Raffaele Limosani, Macro Scafuro, Babara Mizolai, Nino Cauli. (https://journals.sagepub.com/doi/full/10.1177/1729881419857432) [3] International Research Journal of Engineering and Technology (IRJET) www.irjet.net [4] Smart Floor Cleaning Robot (CLEAR)Uman Khalid1, Muhammad Faizan Baloch1, HaseebHaider1, Muhammad Usman Sardar1, Muhammad Faisal Khan1,2, Abdul Basit Zia1and Tahseen Amin Khan Qasuria ( http://www.standardsuniversity.org/wp-content/uploads/SmartFloor-Cleaning-Robot-CLEAR.pdf) [5] Vijayalakshmi, Bhargavi Baljoshi, G. Lavanya, Gaurav Sushil, Gouri master ( https://www.researchgate.net/publication/341162912_Smart_Vacuum_Robot)
Copyright
Copyright © 2022 Ayushman Shukla, Kaushiki , Prabhat Gaurav, Rishabh Kumar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET45414
Publish Date : 2022-07-07
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online