

Ijraset Journal For Research in Applied Science and Engineering Technology
Cleanzo: Vacuum Cleaner with Obstacle Detection using Bluetooth
Authors: Sumaiyya Nadaf, Srushti Patil, Medhavi Pajgade, Hrutvij Patil, Manisha Mhetre
DOI Link: https://doi.org/10.22214/ijraset.2023.52817
Certificate: View Certificate
Abstract
People are becoming more career-oriented in recent years, and because of their erratic work schedules, it is harder for people, especially women, to maintain both home and office simultaneously. The Smart Vacuum Cleaner, which uses more advanced technology and is intended to automate the cleaning process, has been presented as a solution to the issue. It uses sensors to identify obstacles and avoid them, and it also has Bluetooth-based communication. The floor cleaning applications for the cleaning robots are effective in assisting humans in homes, hotels, restaurants, workplaces, hospitals, workshops, warehouses, and universities, among other places, therefore they have gained increasing attention in robotics research. This inexpensive, smart vacuum cleaner is constructed with obstacle avoidance in mind. The robot can periodically clean the floor without human assistance in household and commercial settings. Robotic vacuum cleaners have become more and more common in recent years thanks to their convenience and time-saving features. The effective use of these gadgets in crowded situations still presents a difficulty. The unique method described in this abstract uses Bluetooth technology to improve a vacuum cleaner\'s ability to detect obstacles. Our suggested approach makes use of Bluetooth\'s built-in capability to quickly identify and avoid impediments. The vacuum cleaner can detect the existence of impediments nearby thanks to Bluetooth sensors that are strategically positioned all over its body. To ensure seamless integration with existing smart home ecosystems, the vacuum cleaner\'s Bluetooth module is designed to be compatible with popular home automation platforms. This compatibility allows users to control and monitor the vacuum cleaner remotely through their smartphones or voice assistants, providing a convenient and intuitive user experience.
Introduction
I. INTRODUCTION
A network of physical objects with electronics, sensors, software, and network connectivity is referred to as things in the Internet of Things (IoT). The Internet of Things (IoT) enables remote object sensing and control, allowing for the seamless integration of the physical world with computer-based systems. Modern houses are also increasingly using automation, which offers convenience and reduces the amount of time spent on housework. Urban dwellers put in unusually extended work hours. An individual will always look for ways to save time in such circumstances. It can be challenging for career-driven women to balance home life and work. As of 2021, the ongoing Covid-19 pandemic has made keeping a clean and sanitary living space a top responsibility. Floor cleaning can be done in a number of methods, both manually and automatically. The floor is cleaned using machine power to do so more rapidly and with a larger floor size. However, there are differences and restrictions with floor cleaning equipment. Therefore, it is vital to create a cleaning robot that operates automatically without human aid in order to complete the task swiftly and produce cleaner results across a larger area.
This is the reason we came up with the idea for Cleanzo, a vacuum cleaner that uses Bluetooth to detect obstacles, and Google Assistant for voice commands. The motor shield L298 drives the DC motor after the Arduino Uno microcontroller processes the ultrasonic sensor as a distance detector and a DC motor as the robot's driver. For effective cleaning, the robot will avoid obstacles by adjusting its route when an ultrasonic sensor finds one in front of it. The Arduino-based vacuum cleaner with obstacle detection utilizing Bluetooth is an innovative project that combines robotics, sensor technologies, and wireless communication to produce an autonomous cleaning solution. In this project, we want to create a vacuum cleaner that can go through a room, recognize impediments in its way, and be operated wirelessly using a Bluetooth smartphone app. Traditional vacuum cleaners must be operated manually, which reduces both their effectiveness and convenience. We can improve the capabilities of the vacuum cleaner, making it more intelligent and user-friendly, by incorporating an Arduino microcontroller, a number of sensors, and a Bluetooth connection.
The distance values are evaluated by the Arduino microcontroller to find potential obstructions. The vacuum cleaner adjusts its course to prevent collisions and keeps working to clean when an obstruction is identified.
Bluetooth technology is used to deliver seamless control and monitoring. The cleaner has a Bluetooth module built in that enables wireless communication with a smartphone or other Bluetooth-capable devices. Through this, users can start or stop the cleaning process, change settings, and get real-time feedback while controlling the cleaner remotely. Additionally, voice control gives the project extra functionality and interaction. The cleaner is made even more user-friendly by including a microphone and speaker so that users may give voice instructions to start particular activities. This cleaner's ability to independently identify impediments and adjust its course is its primary functionality.
II. LITERATURE REVIEW
- Abhishek Sutar, Ashish S, Gagan Deep K, Prashanth Kumar K M, Prof. Deepthi Raj: “Automated Domestic Vacuum Cleaner Robot”: This paper discusses information regarding several parts, namely of an Ultrasonic Sensor, Motor Shield L298, Arduino Uno microcontroller, Servo, and Dc Motor. The motor shield L298 drives the DC motor after the Arduino Uno microcontroller processes the ultrasonic sensor as a distance detector and a DC motor as a robot driver. The robot will automatically search for a direction that is not blocking its path if an ultrasonic sensor detects an obstacle in front of it. The sensor's distance value has been established
- E. S. Rahayu, Marudono, and D. A. Azis, "Design of Hoover cleaner dual mode robot prototype based on Arduino uno with Bluetooth and smartphone communication": In this study, a Robot Vacuum Cleaner was designed in the form of a prototype which is operated using an Android-based smartphone through the blynk application that has been installed. The Robot Vacuum Cleaner prototype functioned to clean the floor of a room by sucking dust contained on the floor. The robot's control system is an Arduino Uno board with inputs for a Sharp GP proximity sensor, a Bluetooth HC05 module, a DC L298N Motor Driver IC for controlling robot movement, and an IC IRF520 MOSFET for controlling the speed of the vacuum motor
- Scott H. Judson: “Remote-controlled vacuum cleaner”: Using a handheld remote-control device with a control element (such as a joystick, roller ball, or the like) and a transmitter, a remote-controlled vacuum cleaner is described in this paper. The vacuum cleaner vehicle is designed to be positioned and moved in any direction relative to a surface (such as a carpet) to be cleaned. Preferably, the vehicle has a misting mechanism where a cleaning solution is kept. The vacuum cleaner vehicle preferably includes a misting device in which cleaning solution is stored. The vacuum cleaner vehicle may also be foldable to reduce its size for storage
- Ruri Ashari Dalimunthe, Maulana Dwi Sena, William Ramdhan. “Floor Cleaning Robot Control System with Android Based Voice Command”. The paper is about the project floor cleaning robot created by the authors to reduce the hustle of women who are office workers or manufacturers. The process of cleaning the floor can be done manually, but it requires a lot of effort to reduce this manual work the proposed system cleans the floor with the help of the robot which can be controlled with the help of an Android device because of the penegerak technology using Bluetooth.
- [5] Sayli Mahadik, Ankita Chavan, Prathamesh Yerunkar, Prof. Poonam Pathak. “Voice Operated Floor Cleaning Robot”. The paper is about the Voice Operated Floor Cleaning Robot, the motions of the robot can be controlled by the user by giving specific voice commands. The mechanism involves voice transmission technology, which enables the robot to follow the voice commands.
III. METHODOLOGY
A. Components Used
Arduino board - the main controller for the vacuum cleaner.
Motor driver - controls the speed and direction of the motor.
DC motor - drives the vacuum pump.
Vacuum pump - creates suction to pick up debris.
Ultrasonic sensor - detects obstacles in the cleaner's path.
Bluetooth module allows wireless communication between the cleaner and a smartphone or other device.
Battery - powers the cleaner.
Wheels - allow the cleaner to move around.
Chassis - holds all the components together.
Power regulator - ensures that the voltage supplied to the components is constant.
Voltage regulator - regulates the voltage provided to the Arduino board.
Jumper wires - used to connect components on the breadboard.
Microphone - detects voice commands.
Other mechanical parts - such as brackets, screws, and nuts for mounting the components.
- Assemble the necessary components, including the Arduino Uno board, motor driver module, DC motor, vacuum pump, ultrasonic sensor, Bluetooth module, battery, wheels, and chassis. Put the wheels and chassis together to build the vacuum cleaner's base.
- Connect the motor driver module to the Arduino Uno board, then connect the DC motor and vacuum pump to the module. Program the Arduino board to operate the vacuum pump and ultrasonic sensor and to receive and process data from the Bluetooth module and ultrasonic sensor.
- Utilize the vacuum cleaner’s ultrasonic sensor to identify obstructions in its route, and program the Arduino to halt or change course when an obstacle is seen. Set up the Arduino board to accept commands from a smartphone or other Bluetooth-enabled device by connecting the Bluetooth module to it.
- Create and build a smartphone app that can communicate with the vacuum cleaner over Bluetooth and receive commands for speed adjustment, direction change, and motor start/stop. Utilize the mobile app to steer the robot around obstacles and operate it to test it out.
- Design and code should be adjusted as needed, and Bluetooth connectivity should be improved. Finish the design and assembly after the robot is operating as desired and get it ready for regular use.
- Four DC motors are used to build RC cars, which are programmed to operate at the speed specified by the Arduino IDE code and use a motor shield to move in the correct direction.
- The RC car's ultrasonic sensor measures the distance from it to any obstacles in front of it. Therefore, the RC car carrying the vacuum cleaner alters its direction anytime it comes into contact with any barriers such as walls, tables, etc., or any large objects that cannot be regarded as waste or dust to prevent crashing and destroying itself.
- When an obstruction is detected, the code provided to the Arduino runs constantly and the cycle repeats at regular intervals. In the process of detecting obstacles, an ultrasonic sensor is used, and servo motors are used to move the ultrasonic sensor.
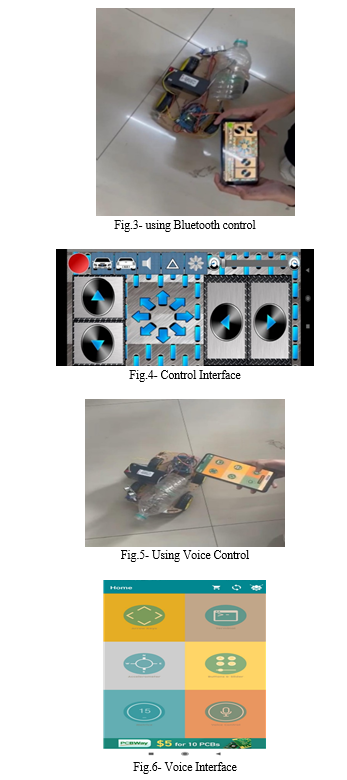
- The vacuum cleaner can be controlled using Bluetooth, the Bluetooth module HC 05, and the "Bluetooth RC controller" app for mobile devices. Additionally, a Bluetooth HC 05 module is used for voice control, and an app that detects and responds to the human voice is employed.
- A water bottle, CPU fan, pipe, tape, gauze bandage, batteries, and switch are the components of a vacuum cleaner. A pipe connects the bottle cap area.

Fig.1-Circuit Diagram
B. Algorithm
- Starting the system: Connect all the necessary parts, such as the motors, sensors, and Bluetooth module, then set up the Arduino board. Set up variables and establish constants for system control.
- Connect your Bluetooth device: Activate the Bluetooth module and set it up to connect to a computer or smartphone. Establish the required communication protocols and make sure the connection is secure.
- Launching the cleaning procedure: Start the cleaning procedure by turning on the Hoover motor. Start the robot's movement by operating the motors attached to its wheels.
- Observe sensor data: Keep an eye on the obstacle detection sensors all the time to gather information about the environment. To detect the existence and vicinity of barriers, read the sensor values.
- Identifying and avoiding obstacles: Examine the sensor data to find obstructions in the vacuum cleaner's path. Perform obstacle avoidance maneuvers if an obstruction is found. To avoid the obstruction, change the robot's direction or speed. To get past the impediment, figure out alternate routes or turns. Ensure the robot's security and avoid any accidents with objects.
- Via Bluetooth, update the cleaning parameters: Obtain instructions or orders from the computer or linked smartphone. Keep an eye out for adjustments to cleaning parameters like cleaning mode, speed, or area. Based on the instructions given, modify the vacuum cleaner's cleaning behavior.
- Check the battery's level: Keep an eye on the battery level at all times to make sure there is enough power for the cleaning process. Implement controls to deal with low battery conditions, such as resuming charging.
IV. RESULTS AND DISCUSSION
- Voice Detection: An Arduino UNO is used to operate the entire system, and a Bluetooth module is utilized to accept commands from an Android phone. The serial port is the communication port. The commands are accepted by the pins on the serial port. Wheel motions that are governed by battery-powered DC motors. Using vocal instructions like "go," "stop," "left," and "right," we may direct the robot's movement. When we instruct the robot to clean, however, the robot will engage the servo motor that is linked to the cleaning mechanism. The robot will return to the Arduino if a problem occurs or it does not accept the commands.
- Obstacle Detection and Navigation: The cleaner has sensors for detecting obstacles that constantly scan the area. The Arduino gets sensor data when an obstruction is found and decides how to navigate to prevent collisions. To avoid harm, the robot can alter its course, reduce its speed, or come to a complete halt.
- Cleaning Mechanism: To effectively gather dirt and debris from the floor, the vacuum cleaner has a suction mechanism. Depending on the cleaning needs, the motor may be turned on or off.
- Bluetooth Connection: The Bluetooth module creates a wireless link between the Hoover and a computer or smartphone. This enables users to operate the robot's movement remotely, initiate or terminate the cleaning operation, and change settings like speed or cleaning modes.
- User Interface: The Bluetooth-connected PC or smartphone acts as the user interface. Users may communicate with the vacuum cleaner, check on its status, and give commands via a specialized mobile application or a bespoke software interface.

V. FUTURE SCOPE
The focus of this project has been on short-range Bluetooth modules. Long-distance connectivity with the robot is possible by using a long-range module. Schedules for sleep and waking up can be included in power optimization. Servo motors can be used to increase accuracy. A 2-D mapping system with artificial intelligence will also be present. To enhance their ability to detect obstacles, vacuum cleaners might use cutting-edge sensor technology like lidar (Light Detection and Ranging) or infrared cameras.
They might have environmental sensors that can detect temperature, humidity, or air quality in addition to obstacles. Vacuum cleaners in the future might include power-saving modes, improved cleaning techniques, and effective power management systems.
VI. LIMITATIONS
An Arduino-based vacuum cleaner's obstacle detection system could not be as accurate or sensitive as commercially available options. Insufficient coverage While the cleaner can makeover around obstacles, its size or other design restrictions may make it impossible for it to reach into or clean around corners or narrow spaces. The cleaner's Bluetooth connection with the controlling device has a finite range. If you move too far away from the cleaner, the connection or functionality may be lost.
The precision and dependability of voice recognition technology implemented with Arduino could not be as high as that of specialized voice assistants or cloud-based systems. Background noise, accents, or different speech patterns could be difficult for it. For maintenance, troubleshooting, and customization, Arduino-based systems often require some amount of technical expertise.
Conclusion
A programmable android-based floor-cleaning device is the project that is being planned here. The building has the ability to clean the floor. The system can function with little to no physical energy from humans. A Bluetooth communicator-based Android control is included with the technique. The Android application may control the robot moving forward, left, right, or back. Using the application microcontroller, the Bluetooth module\'s value is read and equivalent data is sent to the vacuum cleaning robot. In the event of an obstruction in its path, the robot will also change its direction autonomously. The robot\'s speed and direction of movement can both be programmed to move randomly. It enables thorough floor cleaning ROBOT with sweeping, mopping, and suction capabilities. It saves time, lowers staff costs, and delivers effective cleaning. The created system still has room for improvement and expansion in terms of usefulness. The robot\'s speed and direction of movement may both be programmed to move randomly.
References
[1] Abhishek Sutar, Ashish S, Gagan Deep K, Prashanth Kumar K M, Prof. Deepthi Raj: “Automated Domestic Vacuum Cleaner Robot”. https://www.ijraset.com/research-paper/automated-domestic-vacuum-cleaner-robot [2] E. S. Rahayu, Marudono, and D. A. Azis, \"Design of Hoover cleaner dual mode robot prototype based on Arduino uno with Bluetooth and smartphone communication\". https://repo.journalnx.com/index.php/nx/article/view/710 [3] Scott H. Judson: “Remote-controlled vacuum cleaner”: https://www.freepatentsonline.com/6457206.html [4] Ruri Ashari Dalimunthe, Maulana Dwi Sena, William Ramdhan, “Floor Cleaning Robot Control System with Android Baased VoiceCommand”. https://www.researchgate.net/publication/349299686_Floor_Cle aning_Robot_Control_System_ with_ Android_Based_Voice_Command [5] Sayli Mahadik, Ankita Chavan, Prathamesh Yerunkar, Prof. Poonam Pathak, “Voice Operated Floor Cleaning Robot”. https://www.ijream.org/ papers/IJREAMV04I013783.pdf.
Copyright
Copyright © 2023 Sumaiyya Nadaf, Srushti Patil, Medhavi Pajgade, Hrutvij Patil, Manisha Mhetre. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET52817
Publish Date : 2023-05-23
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online