

Ijraset Journal For Research in Applied Science and Engineering Technology
CNN Based Forest Fire Monitoring System
Authors: Bijaya Mandal, Soham Choudhury
DOI Link: https://doi.org/10.22214/ijraset.2023.55136
Certificate: View Certificate
Abstract
As a type of natural resource, forests are vital for our existence. Wildfires are a significant threat to humans and other living beings, with the development of satellite technology it can be continuously monitored and controlled. Accurate real-time monitoring of wildfires is not only an important part of forest fire prevention, but also an important means of effectively controlling the spread of wildfires and reducing economic losses. Therefore, we need a highly mobile early forest fire warning system to ensure the safety of forest resources. In view of this, we propose a forest fire monitoring method that uses convolutional neural network to detect fire from images which can monitor the presence of fire in the forest arena.
Introduction
I. INTRODUCTION
Forest fire detection systems are gaining a lot of attention because of the continued threat of fires both to economic properties and to public safety. Hundreds of millions of hectares are destroyed by forest fires every year and more than 200,000 forest fires occur every year in the world. The forest fires destroy a total surface of 3,5 to 4,5 million km2. The increase in forest fires in forested areas all over the world has resulted in a greater motivation to develop fire alert systems for the early detection of forest fires. Timely detection of early warning fires is of paramount importance for minimizing losses. An important element of fire prevention is effectively controlling the spread of fires and minimizing economic losses. Therefore, we need a highly mobile forest fire early warning system to ensure forest resources are protected. For the detection of forest fire, sensor technology has been widely used which relies on the detection of physical parameters such as changes in pressure, humidity and temperature, as well as chemical parameters such as carbon dioxide, carbon monoxide and to install nitrogen dioxide. However, it is difficult to apply these systems in large open areas for a variety of reasons, such as the high cost, the energy use by the sensors and the proximity required of the sensors to the fire for accurate detection that may result in physical damage and loss of sensors. In addition, the sensor methods have a high rate of false alarms and their response time is quite long. Thus, we have designed and built a forest fire monitoring system that can monitor the presence of fire in the forest area. It allows people to directly verify the statistics of forest fires and inform immediately to forest officials in case of any incident.
II. LITERATURE SURVEY
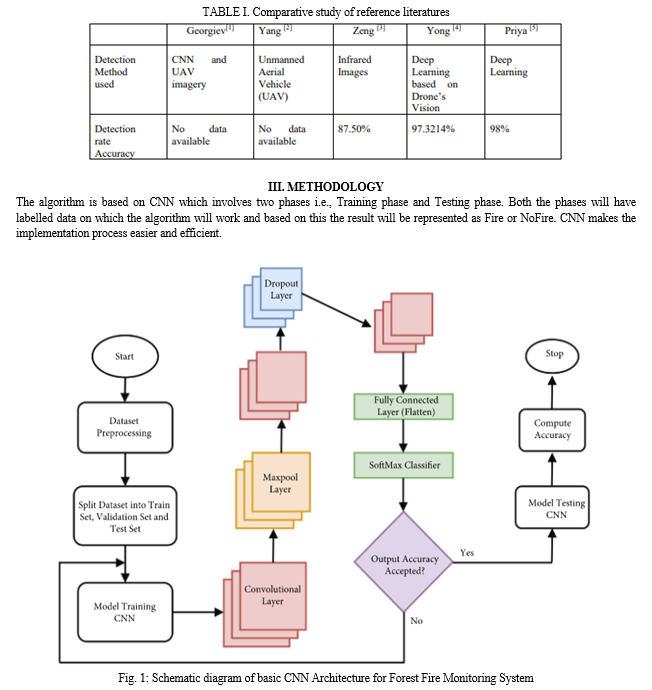
Georgiev Georgi Dimitrov et al [1] Instead of traditional lookouts and satellite monitoring, they used live video from an unmanned aerial vehicle (UAV) patrolling the hazardous area to get a better view of the monitored area. They used not only the drone's optical camera, but also the aircraft's thermal camera to make better predictions about the likelihood of a fire. With the help of the Node-RED software platform, they developed a web platform that can present the acquired data in real time and inform the interested parties.
Yang Xingsha et al [2] Compared with the previous single source fire detection method, this method uses optical and infrared data to conduct fire discrimination, which enhances the robustness of the discrimination results. This method is only effective when the drone is hovering. The background change is fast during the flight of the drone, and the method fails. Existing algorithms still have problems with high false positive rate and false negative rate. Overall, most of the algorithms have strong scene specificity and are particularly vulnerable to environmental interference.
Zeng Jianchao et al [3] Infrared (IR)-based human identification research has recently attracted much attention, especially in pedestrian identification and vehicle safety applications. In this paper, they evaluated some algorithms for urban environments against non-urban IR images. Differences in IR-based human detection in urban and non-urban environments are reviewed. Initial large-scale experiments are being conducted using IR images with a forest background.
Yong Suet-Peng et al [4] This paper presents a technique to detect human presence in forest environments with human object detection algorithms using a deep learning framework. The purpose of detecting human presence in the forest area is to reduce illegal forest activities such as illegal logging in restricted areas. Furthermore, the outcome of this project is to increase the use of drones for forest surveillance to save time and costs.
Priya R. Shanmuga et al [5] To improve the accuracy of fire detection, an efficient convolutional neural network-based Inception-V3 approach based on transfer learning has been developed, which trains satellite images and divides the data set into fire and non-fire. It classifies the images, a confusion matrix is ??generated, the efficiency of the clarification. frames, then extract fire-induced regions in the satellite image using local binary patterns, this reduces the false detection rate.
The main IDE used for our project is Jupyter Notebook where the Programming language used is Python. The libraries used are listed below:
- Jupyter Notebook: Jupyter Notebook is an open source software used to provide services for interactive computing in various programming languages.
- Tensorflow: TensorFlow is a Python programming language library used to build graph and data flow systems. TensorFlow describes how data moves through a graph or series of processing nodes.
- Numpy: NumPy is a Python programming language library that supports large, multidimensional arrays and matrices. To operate on these arrays, it supports a large set of high-level mathematical operations.
- Matplotlib: Matplotlib is a plotting library for the Python programming language. It is a numerical mathematics extension of NumPy.
IV. RESULTS AND DISCUSSIONS
Deep Learning technique is used to increase the amount of data from existing data. First of all, we have imported some required libraries for data preparation like tensorflow, numpy, matplotlib, etc. After that we have prepared the dataset, creating a folder having fire and non-fire images.
We have performed the data preprocessing, firstly defining the training path, then performing the data preprocessing (Data Augmentation). Data Augmentation is basically used to create multiple images from a single image like if we have 10 fire images, it will create many images from 10 images by rescaling, horizontally flipping, vertically flipping, shearing, zooming and shifting. It does so to make the model prediction more accurate.
We have given the training to validation split ratio as 80:20. We have taken the batch size as 32 and the target size as 64. After performing data preprocessing, we got our indices, 0 stands for Fire and 1 stands for NoFire. And it's a binary classification problem which will give result of the given image in the form of 0 or 1.
We have defined our own cnn architecture. The first convolution layer is of 32 filter size with same padding and activation function is relu (Rectified Linear Unit) and input size is 64x64x3. Then maxpool layer of 2x2 pool size. The second convolution layer is of 64 filter size with same padding and activation function is relu (Rectified Linear Unit) followed by maxpool layer of 2x2 pool size. The third convolution layer is of 128 filter size with same padding and activation function is relu (Rectified Linear Unit). Then maxpool layer of 2x2 pool size. Basically, relu activation function apply to each layer so that all the negative values are not passed to the next layer. After implementing all the convolution layers then I have flattened the data into vectors which comes out of the convolutions and I passed the data to the dense layer. One dense layer of 128 units and activation function is relu (Rectified Linear Unit). After that, one dense Softmax layer of 1 units and activation function will be sigmoid. Sigmoid activation function is used when we have a binary classification problem.
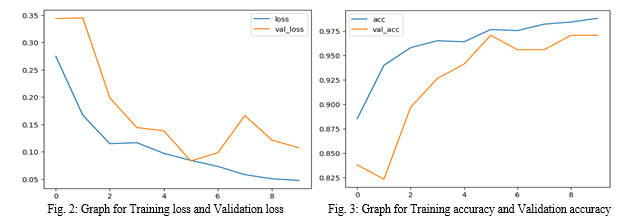
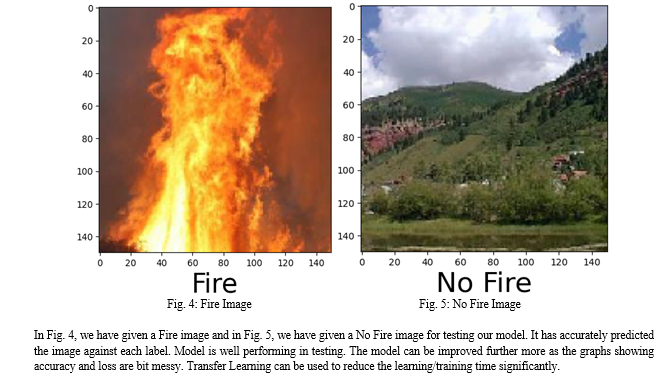
Now compiling the model and training the model for 10 epochs and I have got 98.80% accuracy on the training data and 97.06% accuracy on the validation data. Finally, defining the test function for testing the model. In this function, I have loaded the image then converted image into array, then rescaled the image, then expanded the dimension, then simply predicting the model with the predictImage(image) function.
Conclusion
The System means to fill the gap that exists in the current system. It offers a more robust and scalable solution. It is affordable for the general masses since it is cheap and have high performance accuracy. With these advantages, our application will definitely save our forests, wildlife, human lives and properties.
References
[1] Georgi Dimitrov Georgiev, Georgi Hristov, Plamen Zahariev, Diyana Kinaneva, Department of Telecommunications, Proc. -28th National Conference with International Participation “Telecom 2020”, October 29- 30, 2020, Sofia, Bulgaria. [2] Xingsha Yang , Linbo Tang , Hongshuo Wang , Xinxin He, Beijing Key Laboratory of Embedded Real-time Information Processing, Radar Research Lab, School of Information and Electronics, Beijing Institute of Technology, Beijing, China. [3] Jianchao Zeng, Aya Sayedelahl, M. F. Chouikha Department of Electrical and Computer Engineering Howard University, Washington, DC 20059, E. Thomas Gilmore, Preston D. Frazier Mitre Corporation, McLean, VA 22101, USA General Dynamics Corporation, Hanover, MD 21076, USA. [4] Suet-Peng Yong and Yoon-Chow Yeong, Computer and Information Science Department, Universiti Teknologi PETRONAS, 32610 Seri Iskandar, 2018 4th International Conference on Computer and Information Sciences (ICCOINS) Perak Darul Ridzuan, Malaysia. [5] R. Shanmuga Priya, K. Vani, Department of Information Science and Technology College of Engineering, Guindy Anna University Chennai 600025, 2019 11th International Conference on Advanced Computing (ICoAC) 978-1- 7281-5286-8/20/©2020 IEEE 10.1109/ICoAC48765.2019.246817, India [6] https://ieeexplore.ieee.org/document/8697708 [7] https://www.hindawi.com/journals/mpe/2022/9210947/ [8] https://www.kaggle.com/datasets/kutaykutlu/forest-fire [9] https://www.kaggle.com/datasets/brsdincer/wildfire-detection-image-data
Copyright
Copyright © 2023 Bijaya Mandal, Soham Choudhury. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET55136
Publish Date : 2023-08-01
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online