

Ijraset Journal For Research in Applied Science and Engineering Technology
Comparison Study of Battery & Supercapacitor Standalone Storage System Based Light Electric Vehicle Using MATLAB/SIMULINK
Authors: Praveen Vankadari, Sri. Kumar Kotni
DOI Link: https://doi.org/10.22214/ijraset.2021.39471
Certificate: View Certificate
Abstract
Because of rising air pollution and finite oil supplies, the transportation sector is transitioning from IC engine vehicles (ICEV) to EV (Electric Vehicle). However, because of the constraints imposed by the energy storage, there are still some questions about EV\'s performance and dependability. In our proposed system, a comprehensive analysis has been carried out on a Light EV configuration having a propulsion system driven by a BLDC motor supplied by a Energy storage system (ESS) consisting of a Battery or Supercapacitor. To gain an understanding of the electric vehicle driving dynamics, it is first simulated based on fundamental knowledge about electric vehicles. Then each component and their modelling with control strategies are developed to get a clear picture of the computation of various constraints in EV during its operation. Later parts of this study are dedicated to examining their energy and power management during the acceleration and deceleration phases of the vehicle for battery and supercapacitor standalone operations separately with their key results tabulated using MATLAB/Simulink.
Introduction
I. INTRODUCTION
Due to global warming and other related environmental issues, whole world started imposing strict laws on ICEV emissions in order to reduce CO2 emissions per km by ratifying pollution regulations (i.e., a high tax will be levied on vehicles emitting more than 95 g/km of CO2). The regulation requires the automotive industries to develop new ICEVs in order to comply with this rule. However, conventional vehicles powered by Internal Combustion Engine (ICE) technology may not meet this requirement. In fact, ICE technology has matured to the point of saturation and the only way ICE vehicles can be improved is by reducing their weight and drag force.
This prompted the Indian government to prioritise EVs as an alternative to ICEVs in heavily polluted cities, launching programmes such as "Faster Adoption and Manufacturing of Electric and Hybrid Vehicles in India (FAME)," that will provide subsidies to 11 cities for the development of electric buses, scooters, bikes, taxis, and e-rickshaws. As a result, interest in electric vehicles has surged in cities where their short range and charging time aren't a hindrance.
In recent times, Light electric vehicles (LEVs) are becoming an increasingly important segment of the EV industry. LEVs, which includes anything from e-scooters and e-bikes to e-rickshaws and e-forklifts, e-motorbikes, and low-speed electric vehicles, are simple to drive and operate even in heavy traffic conditions. In reality, most do not require a license to operate. LEVs will progress in the future years to integrate sensors, enabling some of the automated smart features featured in many of today's high-end electric automobiles. Their appeal stems in part from their minimal initial investment as well as their low operational and maintenance expenses. Because of these qualities, they are accessible to a wide portion of the global population, including those in emerging economies like India. LEVs also have the advantage of being easy to charge on the regular power grid. Most critically, they meet an increasing number of zero-emissions standards. Despite their recent success and potential future, Light electric vehicle (LEV) applications confront a number of design problems like small space available, battery range and power scaling are limited, only cost-effective solutions needed etc.
For any electric vehicle, storage plays an important role in its final performance. Recently, the popular storage devices as per IEC are Li-ion Battery and Supercapacitors. This project involves in addressing the problems in battery pack and supercapacitor to give the idea of their potential features in segment of light electric vehicles.
II. MATHEMATICAL MODELLING OF EV COMPONENTS
Electrical Vehicle is combination of various devices belong to different domains. So, we need to analyse each component individually to get overall understanding about its parameters and their prominence. For ease of modelling, whole EV is divided atomic units like EV mechanical model, BLDC motor, Li-ion battery, Supercapacitor and DC-DC converters.
A. Vehicle Mechanical System Modelling
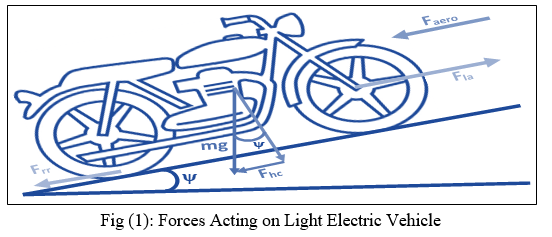
The initial stage in vehicle performance modelling is to develop an equation for the necessary “Tractive effort” [1-2]. This is the force that propels the vehicle forward and is imparted on the ground via drive wheels. Consider a vehicle with mass m moving at velocity ‘v’ up an angle slope ‘ψ’, as shown in Fig (1). The tractive effort, or power driving the vehicle ahead, must provide force to:
- Overcome the rolling resistance
- Overcome the aerodynamic drag
- Provide the force required to overcome the weight component of the vehicle acting down the slope.
- Accelerate the vehicle, if the velocity is not constant.
B. Rolling Resistance Force
The rolling resistance or rolling friction is the force that opposes the motion of a body rolling on a surface. The rolling resistance can be expressed by the generic equation:

Where;
Frr = rolling resistance or rolling friction (N)
Crr = rolling resistance coefficient - dimensionless
W = mg = normal force - or weight - of the body (N)
m = mass of body (kg)
g = acceleration of gravity (m/s2)
C. Aerodynamic Drag Force
Drag is the net force in the direction of flow caused by pressure and shear stress forces on the surface of an item moving through a fluid (ex., air, water etc.,). It is mathematically expressed as:
The drag force can be expressed as:

Where;
Fd = drag force (N)
Cd = drag coefficient
ρ = density of fluid (1.225 kg/m3 for air at NTP)
v = flow velocity (m/s)
A = characteristic frontal area of the body (m2), has to be calculated for each vehicle individually using estimation or by computer tools.
D. Hill Climbing Force
The force needed to drive the vehicle up a slope is the most straightforward to find. It is simply the component of the vehicle weight that acts along the slope.

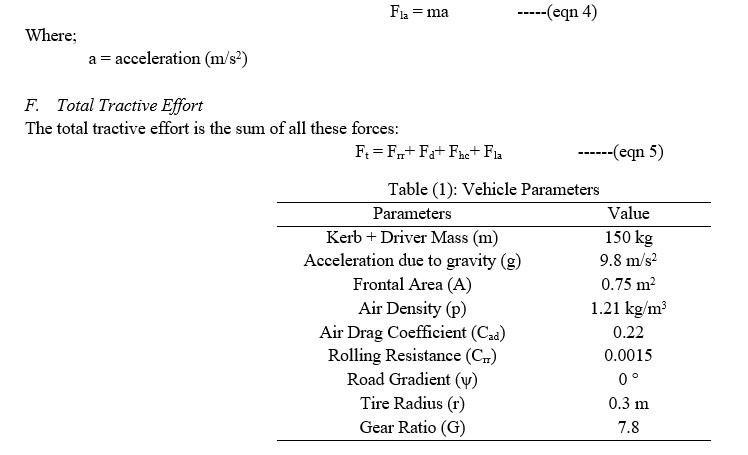
E. Linear Acceleration Force
This force will provide the linear acceleration of the vehicle, and is given by the well-known equation derived from Newton’s third law,
G. Modelling of BLDC Motor
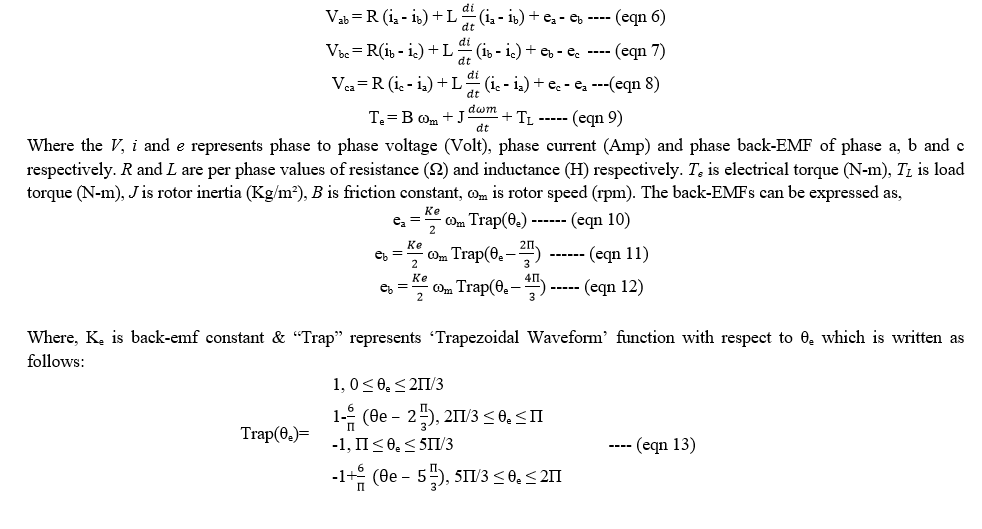
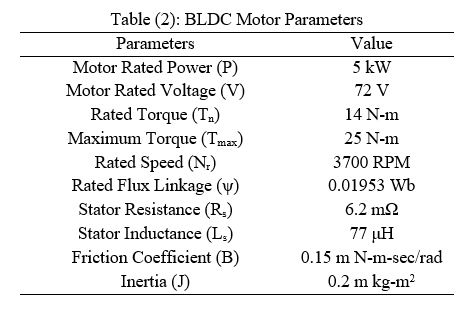
In this section, mathematical model BLDC motor by considering BLDC motor as “star connected” and considering that the internal impedances of stator are symmetric and rotor saliency and magnetic alignment are ideal & uniform and proceeded for modelling. The electrical and mechanical equations for a three-phase star connected BLDC motor are as follows [5]:
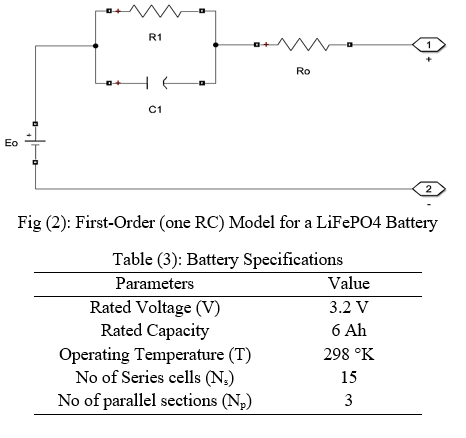
H. Modelling of Li-ion Battery
Lithium-Ion (Li-Ion) batteries are considered as high-capacity batteries, which can be designed for either high energy or high-power applications [6]. While there is a need for a model capable to describes the battery behaviour, with a variation of battery conditions such as SOC, temperature, loading conditions and their magnitude etc. The battery model consists of a Voltage Source, Internal Resistance & one to three RC parallel branches depending on intensity of dynamics to be captured. Here, we consider a simple First-Order (one RC) Model for a LiFePO4 Battery as shown in Fig (2).
I. Modelling of Supercapacitor
Today’s low-cost batteries perform horribly in applications requiring large (dis)charge currents. Adequately constructed supercapacitors (SC) in theory allow today’s high energy density batteries to be used successfully, since the supercapacitors take on the temporary load of large (dis)charge currents. In order to get best result, we need model of supercapacitor. The supercapacitor proposed uses the Stern model where EDLC is described as nonlinear capacitance. Here we consider that electrochemical model reproduces the double layer capacitance (CT) related to the nonlinear diffusion dynamics. These equations are as follows:
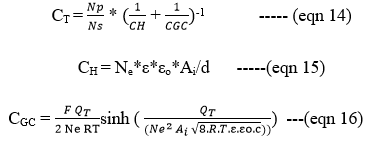
Where Np is the number of parallel supercapacitor cells, Ns is the number of series of supercapacitor cells, Ne is the number of layers of electrodes, d the molecular radius (m), c the molar concentration (mol.m-3), Ai is the interfacial area between electrode and electrolyte (m2), T is the operating temperature (K), Fc is the Faraday constant (C/mol), R is the ideal gas constant (J/(K.mol)), εr is the relative permittivity of the electrolyte material, and ε0 is the free space permittivity (F/m).
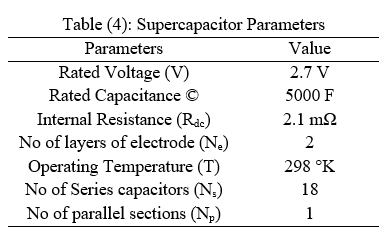
In this project, a 2.7 V, 5000 F Supercapacitor by Maxwell Technologies has been used to make a pack of 18 series capacitors with only one parallel string. Its important parameters are tabulated in Table 4.
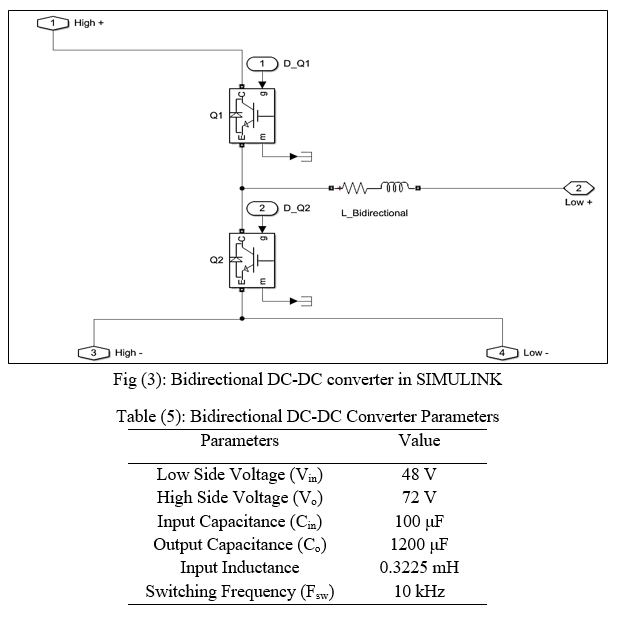
J. Bidirectional DC-DC Converters
Bidirectional DC/DC converters (BDCs) with fewer components, lower costs, and higher efficiency are frequently employed in bidirectional power flow where power density, cost, weight, and reliability are significant considerations, such as in electric vehicles. The bidirectional converter is modelled using SIMULINK as shown in Fig (3) with its parameters of proposed converter tabulated in Table (5).
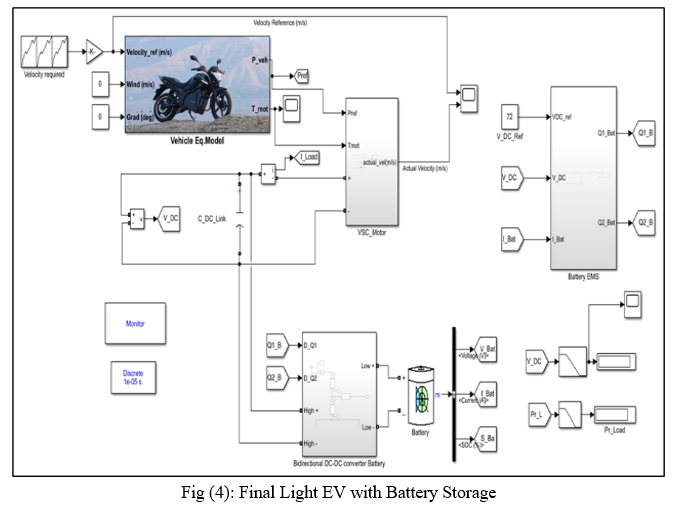
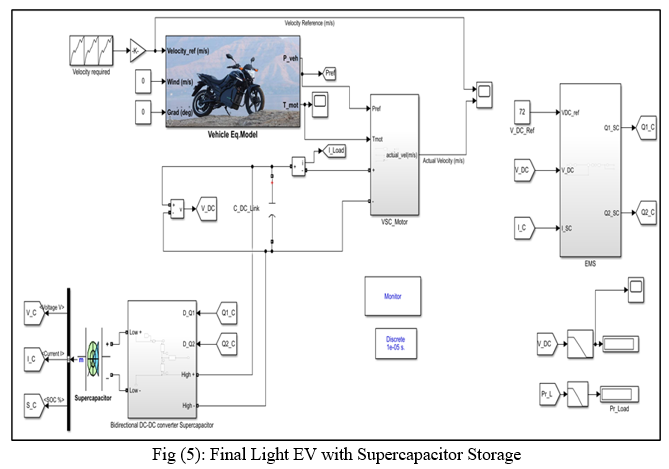
III. PROPOSED SIMULINK MODELS:
The Light Electric vehicle (LEV) with only battery storage system is shown in fig (4) & the Light Electric vehicle (LEV) with Supercapacitor only system is shown in fig (5).
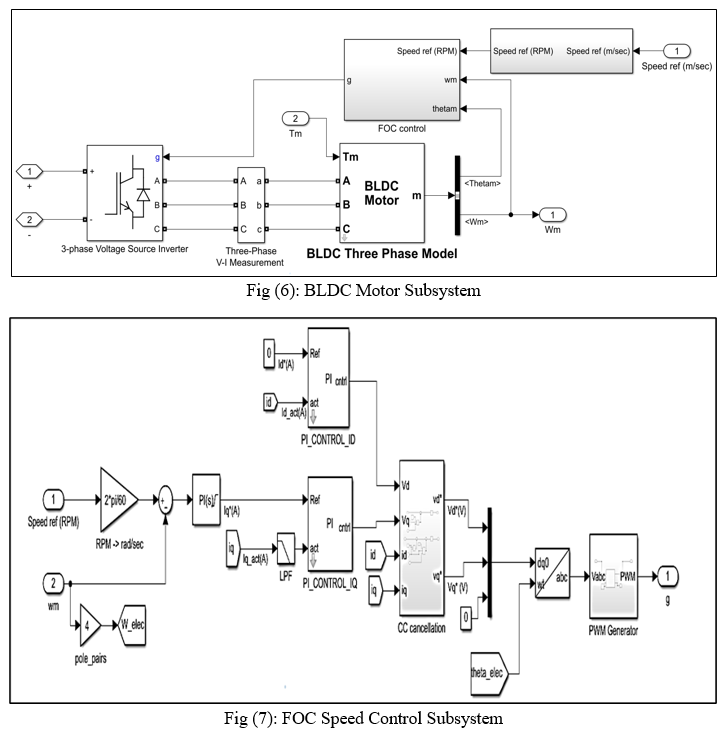
The mathematical modelling of BLDC motor and its parameters are discussed in before section. The BLDC and FOC control subsystem are presented in Fig (6) & (7) respectively:
The Energy management system (EMS) for bidirectional DC-DC converter which is common for both standalone systems is presented in Fig (8) and its parameters are presented in Table (6).
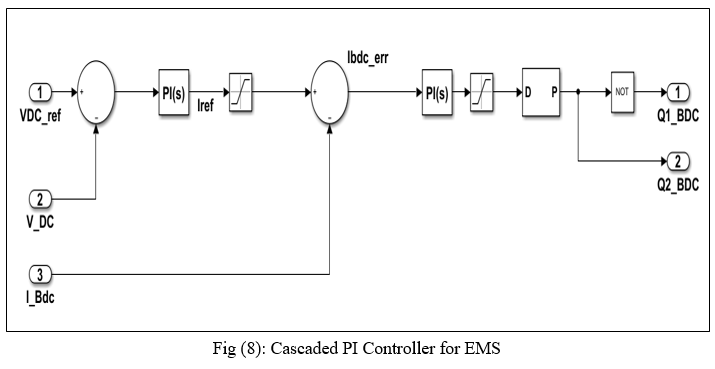
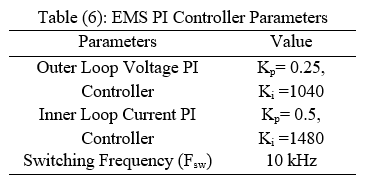
The BDC’s final control system shown in Fig (8) have mainly two tasks:
- To supply the reference current to load
- Keep the voltage in limits while discharging/charging.
Thus, optimal control of BDC’s requires a cascaded type architecture with two loops where inner loop taking care of current compensation and outer loop limits the voltage variations across load below 80 V (max. voltage across BLDC motor) and motor average voltage maintained around 72 V.
IV. RESULTS & DISCUSSIONS
In this section, the simulation results of Fig (4) & (5) under simulation time of 33 seconds using MATLAB 2020a are presented.
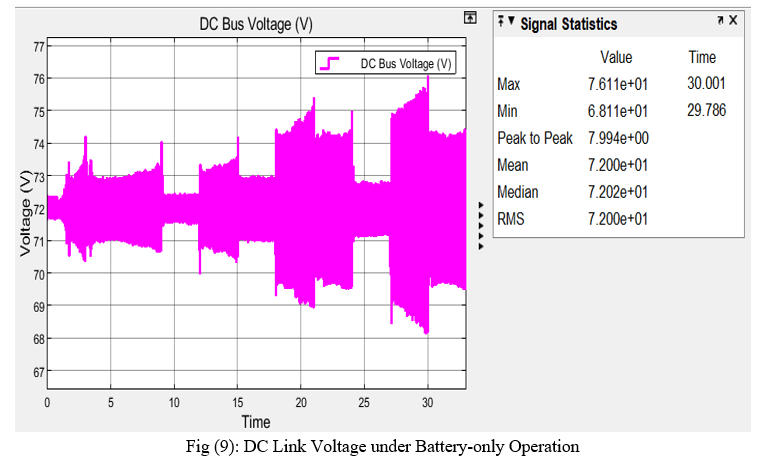
A. Battery LEV Operation
When we use battery for our proposed LEV with initial SOC as 60% are shown in Fig (9), (10) & (11). Under only-battery operation, we consider a 48 V, 18 Ah battery to supply 5 kW power to the vehicle. DC link voltage varied upto ± 4V with mean value maintained at reference point 72V which is acceptable yet non-optimal as shown in Fig (9).
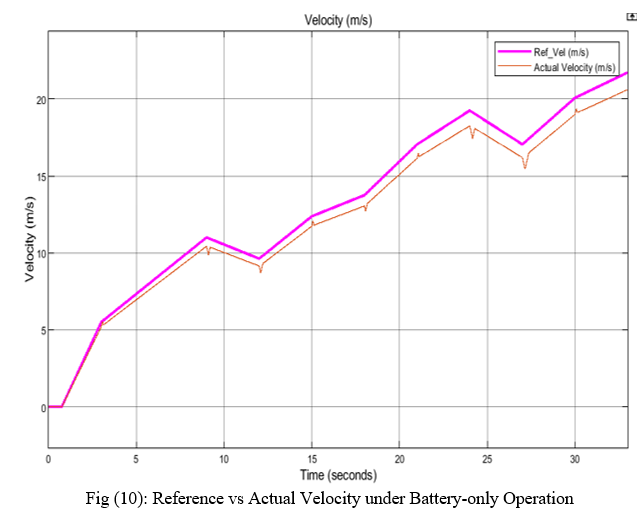
As per Fig (10), when we applied max reference velocity 21.725 m/s (78.2 kmph), the EV max speed attained is 20.6032 m/s (74.171 kmph) and the velocity tracking Root Mean Square Error (RMSE) is around 1.78 m/s (6.4 kmph) which is very slightly optimal.
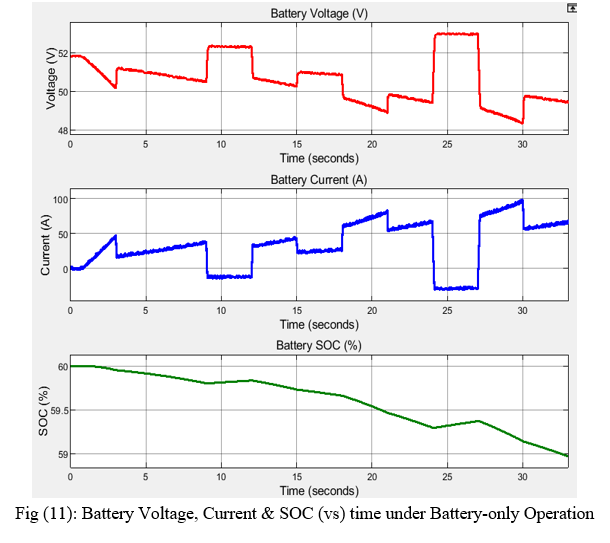
From the Fig (11), the initial SOC of battery is 60 % and for a simulation time of 33 seconds, the final SOC is 58.9716 %. The max. Current supplied by the battery is 98.51 A which equals 5.5 C discharge rate which is very high current rate which can be simulated but a real-time battery pack cannot supply this as this may speed up ageing of battery or create burn-out. Maximum Regenerative current observed is around -30.5 A which is acceptable considering LifePO4 chemistry but it’s not preferable
B. Supercapacitor only Operation
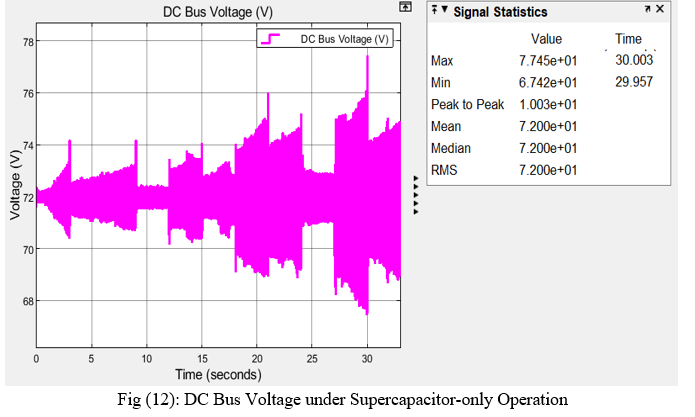
The following output waveform from Fig 12, 13 & 14 are obtained when we operate supercapacitor only with its initial SOC as 99.23 %. When only supercapacitor operated the EV, we require 48 V, 28 F pack supply 5 kW power to the vehicle.
Fig (12) shows that the DC link voltage varied around ± 5 V with mean value maintained at reference point 72 V which is worse than battery-alone operation.
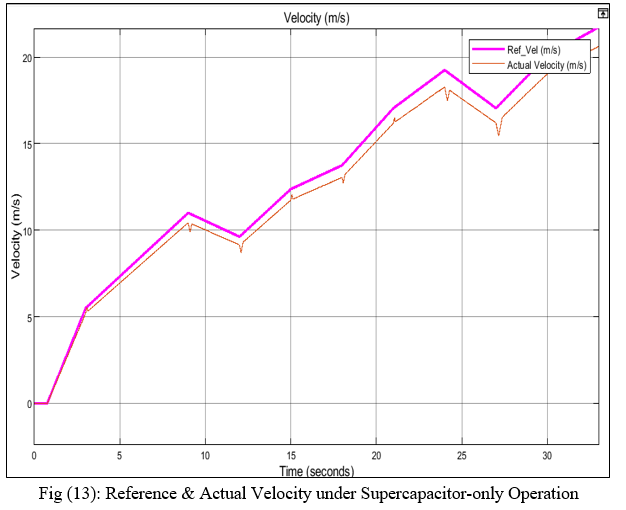
In Fig (13), it is observed that when we applied max reference velocity 21.725 m/s (78.2 kmph), the EV max speed attained is 20.9 m/s (75.241 kmph) and the velocity tracking Root Mean Square Error (RMSE) is around 0.74 m/s (2.664 kmph) which is very better compared to battery operation.
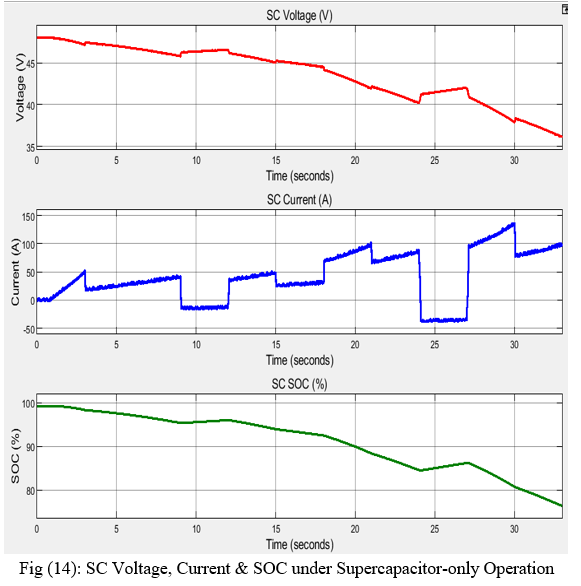
The initial SOC of supercapacitor is 99.3 % and for a simulation time of 33 seconds, the final SOC is 76.3 % as shown in Fig (14). It shows the inherit feature of supercapacitor that it discharges faster than battery. The max. Current supplied by the supercapacitor is 138.8 A. Max. Regenerative current observed is -38.33 A which means more recovery than battery.
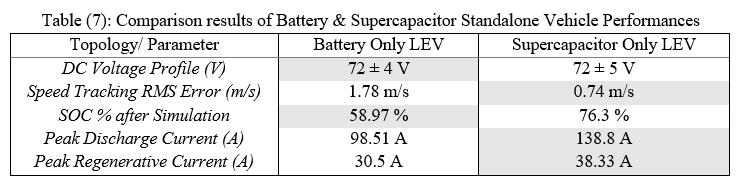
From the simulation results presented in Fig (9)-(14), it is observed that the supercapacitor discharges faster from 99 % to 76.3 % and battery only discharges to 58.97 % from 60 % initial SOC for the same acceleration input to the vehicle mathematical model. The final simulation results are tabulated in Table (7) to get a overview of the comparisons with best performances highlighted.
Conclusion
In this paper, we have concentrated on battery and supercapacitor standalone based EV and simulated its performances. Under only-battery operation, the DC link voltage varied upto ± 4V due to varying speeds with mean value maintained at reference point 72V which is acceptable yet non-optimal. The velocity tracking Root Mean Square Error (RMSE) is around 1.78 m/s (6.4 kmph) which is very sub-optimal. When only supercapacitor supplies the EV, we require 48V, 125 F pack supply 5 kW power to the vehicle. DC link voltage varied around ± 5V with mean value maintained at reference point 72V which is worse than battery-alone operation. The velocity tracking Root Mean Square Error (RMSE) is around 0.74 m/s (2.664 kmph) which is very better compared to battery operation. In regenerative braking mode, supercapacitors have better performance as they can take maximum current without any deterioration of its parameters. Hence, it is clear that battery and supercapacitor based light electric vehicles are possible to get an optimal performance compared to IC engine vehicles. There are slight drawbacks in supercapacitor and hence it cannot be used as standalone storage unit because it discharges faster from 99 % to 76.3 % for same input acceleration. It is found that supercapacitors can be used as an aid to battery storage by using it in bidirectional DC-DC converter instead of normal capacitors to get more regenerative power. So, Battery Electric Vehicles are possible reality whereas Supercapacitors need to evolve in its energy performance to be a viable solution for energy storage units of EV’s.
References
[1] T. v. Sarathkumar, M. Poornanand, and A. K. Goswami, “Modelling and simulation of electric vehicle drive through SAEJ227 EUDC cycles,” Jul. 2020. doi: 10.1109/SCES50439.2020.9236717. [2] Adeel salem, Nain Liu, Hu Junjie, Atif Iqbal, M.A. Hayyat, and M.Mateen, “Modelling of an Electric Vehicle for Tractive Force Calculation Along With Factors Affecting the Total Tractive Power and Energy Demand,” 2020. [3] M Khalid, S S Sheikh, A K Janjua, and H A Khalid, “Performance Validation of Electric Vehicle’s Battery Management System under state of charge estimation for lithium-ion Battery,” 2018. [4] P. M. Nicolae and Euseviu F. Bida, “Aspects Regarding the Simulation of an Electric Drive PM Motor Used in Light Electric Vehicles,” 2016. [5] Sai Krishna .V, J. Ramaprabhakar, and G. Prabhakar, “Electric Vehicle Designing, Modelling and Simulation,” 2018. [6] W. I. Gabr, H. H. el Din, M. A. Elshahed, and Ja?mi?at al-Qa?hirah, “Operation of Brushless DC Motor to Drive theElectric Vehicle,” 2018. [7] G. Guruvareddiyar and Ramachandran Ramaraj, “Super Capacitor Based Energy Recovery System fromRegenerative Braking used for Electric VehicleApplication,” IEEE, 2019. [8] P. Chatterjee, J. Singh, R. Singh, Y. A. R. Avadh, and S. Kanchan, “Electric Vehicle Modeling in MATLAB and Simulink with SoC &SoE Estimation of a Lithium-ion Battery,” IOP Conference Series: Materials Science and Engineering, vol. 1116, no. 1, p. 012103, Apr. 2021, [9] Gergana VACHEVA, Vladimir DIMITROV, and Nikolay HINOV, “Modelling and Control of Bidirectional Buck-Boost Converter for Electric Vehicles Applications,” in IEEE, ELMA 16th Proceedings, 2019, vol. ELMA, no. 16th. [10] P. M. B. Devamalar, V. T. Bai, M. Moorthi, Prathyusha Engineering College, and Institute of Electrical and Electronics Engineers, “Battery Model for Hybrid Electric Vehicle Corrected for Self-discharge and Internal Resistance,” 2016.
Copyright
Copyright © 2022 Praveen Vankadari, Sri. Kumar Kotni. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET39471
Publish Date : 2021-12-16
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online