

Ijraset Journal For Research in Applied Science and Engineering Technology
A Review on Controlling Methods for Active Suspension Systems
Authors: Kaustubh D. Dandavate, Dr. Pravin R. Kale
DOI Link: https://doi.org/10.22214/ijraset.2023.56929
Certificate: View Certificate
Abstract
Active suspensions have emerged as a transformative technology in the field of vehicle dynamics and ride comfort. This review paper presents a comprehensive overview of the performance of active suspensions, exploring their fundamental principles, control strategies, and real-world applications. Active suspensions, equipped with sensors, actuators, and control systems, offer the ability to adapt in real-time to varying road conditions, providing enhanced ride quality, vehicle stability, and handling precision. It reviews various control strategies, highlighting the trade-offs between complexity and overall system effectiveness. Moreover, the review provides deep insights into the Fuzzy control of active suspension technologies, offering an analysis of their benefits and drawbacks. It also explores the environmental implications, safety considerations, and future prospects of this evolving technology.
Introduction
I. INTRODUCTION
The suspension system is made up of linkages, shock absorbers, and tire pressure that connects a car to its wheels and permits relative motion between them, responsible for managing ride comfort, handling, and road-holding characteristics.[1] Prominent components of a suspension system are spring, damper (dashpot), Knuckle, Control Arm, etc. Advanced research in this field focuses on enhancing suspension performance through adaptive and active technologies, enabling real-time adjustments to varying road conditions. The complexities of suspension design and optimization continue to be a prominent area of study in automotive engineering, contributing significantly to the overall safety and performance of modern vehicles. Active Suspension were first introduced in 1990, but were a commercial failure. However, further studies on it were progressing making advancement to its technology. These suspensions are currently being used widely due to their ability to eliminate body roll during acceleration, braking and cornering while driving.
In addition to being automatically operated, driver-adjustable electronic dampers allow active suspensions to be adjusted to different road conditions and damping ratios. When the electric drive train is completely integrated into the wheel, it operates at its highest efficiency. This indicates that there is a growing need for active suspension and that cars should incorporate it. [2] However, in active suspension systems, it is critical to build a precise mathematical model since the parameters are uncertain and external disturbances always exist in practical scenarios. [7]
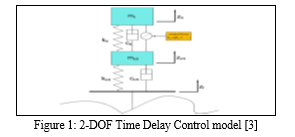
A. Time Delay Feedback Control of Active Suspension System
As per Yang Nan et.al (2023) [3], The Routh-Hurwitz criterion and Sturm polynomial discriminant theorem are used to analyze the stability region of the 2-DOF time-delay suspension model, which is based on sprung mass speed feedback. The time-delay independent stability region increases as suspension damping increases. While compared to LQR control active suspension, the suspension vibration reduction performance under time-delay feedback control has a limited range of optimization. However, In addition to lowering control accuracy, the time delay will also cause reduced stability and bifurcation chaos to occur in the suspension system. [3]
D. Adaptive Tracking Control for Active Suspension System
Huihui Pan et.al [7], have designed this system considering a quarter car model, to achieve enhanced vertical dynamic performance of the vehicle considering parameter uncertainties, external disturbances and non-ideal actuators. The input-output characteristics of non-ideal actuators are described by a linear approximate model with a time-varying disturbance-like term parameter. The proposed control law is adaptive to parameter uncertainties and lessens the effects of imperfect actuators with theoretical assurance when compared to current suspension control techniques. The stability analysis of the closed-loop suspension systems is provided with rigorous mathematical derivations. Authors have stated that numerical results achieved are satisfactory and show enhanced ride comfort properties. [7]
E. PID control of Active Suspension System
A PID controller is a type of linear controller that is frequently utilized in automation and industrial applications. The three stages of this controller are the derivative stage (D), the integral stage (I), and the proportional stage (P). The SISO object is controlled by a PID controller using the state feedback principle. This controller aids in bringing the system's error value, e (t), and closer to zero in order to meet the fundamental standards of quality.
According to the authors, the displacement and acceleration of the sprung mass are both greatly decreased in a vehicle that has an active suspension system that is managed by a double-integrated controller. Furthermore, the amplitude of oscillation for these values is very small. In contrast to earlier studies that exclusively employed conventional control techniques, the implementation of the double-integrated controller has resulted in high effectiveness. As a result, the comfort and stability of the car can be improved. [9]
F. Benefits and Drawbacks of ASS
The active chassis stabilizes the vehicle on its own, regardless of the state of the chassis as a whole. The car can stabilize itself without relying on the suspension's overall condition. It removes body roll when navigating fast turns. It gets rid of the car's pitch. The Anti-roll bar can be removed when utilizing a fully active suspension in a vehicle that has active suspension installed. It has system characteristics that can be adjusted even while driving. It improves the tire's contact with the road, which raises the car's total grip and makes the ride safer. Installing an active suspension has the drawback of being more difficult to maintain. The dampers consume a significant amount of power. A high peak power is necessary for active suspension. Therefore, a high current from the battery is always required; if the car's battery is low, the active suspension won't function as intended. Because of their complexity, active suspensions raise reliability concerns. Its intricate design makes it impossible to study in isolation.[2]
II. FUZZY PID CONTROL FOR QUARTER CAR MODEL
A. Dynamic Model
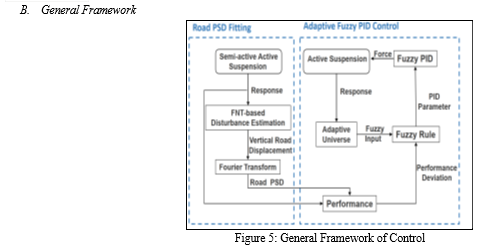
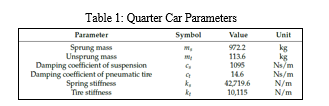
In this instance, the 1/4 active suspension model is selected as the control model for the vertical vibration resulting from an uneven road; Figure 1 illustrates the architecture. The sprung and unsprung masses in this model are represented by the symbols ms and mu, respectively. A linear spring with a stiffness factor of ks and a linear damper with a damping factor of cs characterize the suspension system. A linear damper with a damping factor of ct and a linear spring with a vertical stiffness factor of kt define the tire. The actuator u produces the active control force.
The primary goal of the author was to create an adaptive fuzzy PID controller that can quickly adapt to the various performance requirements for driving safety and comfort on various types of roads. That was accomplished by combining road data and suspension status in an efficient manner, which enhanced the system's stability and vibration damping capabilities.
The active suspension adaptive fuzzy PID control strategy and the road PSD fitting component made up the control architecture.
The primary goal of the road power spectral density fitting section was to give the suspension damping control strategy the necessary information about the upcoming road conditions. First, the front portion of the semi-active suspension system sent the suspension response signal to the sensor. After that, the vehicle parameters and the signal were fed into the FNT in order to fit the road's vertical disturbance. Lastly, a Fourier transformation on a self-consistent function was employed to obtain the road power spectral density using the vertical disturbance as an input. In order to anticipate the state of the roads and select distinct control goals for various routes, the latter section was integrated with the PSD fitting outcomes of the preceding section.
Initially, an online fuzzy evaluation of road condition was obtained by fuzzifying the results of the suspension online performance evaluation and road power density estimate. This modified the controller's control objective. The vehicle's real-time suspension displacement signal then adaptively modified the fundamental domain, bringing the road surface's various variation ranges into alignment. The performance deviation and its rate of change are finally fuzzified, and fuzzy rules were created to enable the adaptive real-time adjustment of PID parameters. This allowed the suspension system to promptly adjust to the vehicle's internal response as well as changes in the external road excitation, and the controller to generate a control force to achieve various control effects on various road surfaces.
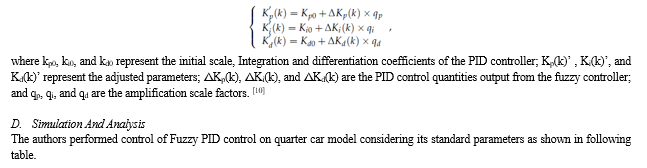
C. Adaptive Fuzzy Pid Controller
According to the adaptive fuzzy PID controller control schematic, the following adjustment rules are obtained for the two-input, three-output fuzzy controller.
To verify the effectiveness of the proposed fuzzy PID control strategy for damping on different road conditions, a simulated test road was constructed in MATLAB/SIMULINK. The simulated road consists of 10 different levels of road under ISO8608 for a total of 2 km, which fully considers a variety of road changes. The road surface was continuously disturbed, and multiple road surfaces and road switching were considered. The vehicle was driven at a constant speed of 20 m/s, and the road level changed every 10 seconds.
The estimated and actual road vertical displacements are compared using the FNT-based road estimation algorithm in the time domain. The test error's RMS is 0.0592, indicating a good fit.
The PSD was obtained by applying the Fourier transform of autocorrelation to the road vertical displacement. The periodogram approach and the Fourier transform of autocorrelation were contrasted in terms of noise resistance performance to confirm the impact of the former. Random noise was added to the time domain signal, and the results showed that the latter performed more smoothly and with greater noise resistance. [10]
III. FUTURE SCOPE
Most of the researches currently have been conducted considering quarter car models only. However, in future complex models may be considered for future developments. Currently road excitations have be considered in preliminary stages. But, going forward, study can take place taking road excitations as central theme for modelling. Random parametric excitations also need to be studied for future developments.
Study regarding incorporation of electromagnetic actuators in ASS has also lot of scope to be studied. Research on the combination of air suspension and active suspension will significantly impact the field of active suspension technology. Currently, Adaptive Harmonic control has been studied for a half car model. But, for future research, the proposed control algorithm can be implemented on an embedded system with a real-time operating system to obtain some experimental results which can validate the proposed solution. The software configuration for real-time performance and the hardware's ability to produce a harmonic signal may be the reason behind the implementation difficulties.[13]
Conclusion
When it comes to managing and enhancing performance, the active suspension works better than the passive suspension. It can keep the required level of comfort and stability because the suspension can be adjusted to the driving conditions. Active suspension stops or minimizes the vehicle\'s body roll. [2] The experimental results show that the suspension vibration reduction performance under time-delay feedback control has a certain range of optimization compared with the LQR control active suspension. Under harmonic excitation, the RMS value of SMA decreases from 1.7437 to 1.0606 by 39.17%, while under random excitation it decreases from 1.5891 to 1.0250 by 35.5%. And in the simulation and experimental comparison under the same working condition, the error of RMS of SMA is 12.51% and 15.57% respectively, which meet the engineering requirements.[3] The most popular controller in the industrial sector, the PID controller is utilized for many different types of vehicle suspension controls. It can be highly applied to enhance the PID controller and address its shortcomings. Under various road conditions, the vehicle\'s safety, comfort, and stability can be achieved by utilizing the proposed road condition-based fuzzy PID controller. The numerical simulation results show that, due to its different priorities of control performance trade-offs for various road conditions, the suggested control strategy can significantly improve the vehicle\'s performance when compared to the passive control of the suspension and the PID control of the suspension.[10] Duc Ngoc Nguyen et.al[8] research proposes an active suspension system as a solution, employing a quarter dynamics model to simulate the vehicle\'s oscillation and a linearized model of the hydraulic actuator. The novel approach introduces the Sliding Mode Control algorithm to handle the complex nonlinear control of the vehicle\'s oscillations, demonstrating superior performance in simulations. However, the study is limited to a quarter dynamics model, and future work may involve more complex models and real-world experiments to further validate the effectiveness of this nonlinear control algorithm.[8]
References
[1] Harish C S and Naveen Lara, “Design and Analysis of Active Suspension System”, International Research Journal of Engineering and Technology, vol. 08, issue 01, pp. 1023-1027, January-2021. [2] Tony Sabu, “Overview of Active Suspension System in Automobiles”, International Research Journal of Engineering and Technology, vol. 08, issue 07, pp. 4856-4861, July-2021. [3] Y. Nan, S. Shao, C. Ren, K. Wu, Y. Cheng and P. Zhou, \"Simulation and Experimental Research on Active Suspension System With Time-Delay Feedback Control,\" in IEEE Access, vol. 11, pp. 88498-88510, 2023, doi: 10.1109/ACCESS.2023.3305265. [4] S. Palanisamy and S. Karuppan, “Fuzzy control of active suspension system,” Journal of Vibroengineering, Vol. 18, No. 5, pp. 3197–3204, Aug. 2016, https://doi.org/10.21595/jve.2016.16699 [5] J. Lin and R. -J. Lian, \"Intelligent Control of Active Suspension Systems,\" in IEEE Transactions on Industrial Electronics, vol. 58, no. 2, pp. 618-628, Feb. 2011, doi: 10.1109/TIE.2010.2046581. [6] Nguyen, T.A. 2021. Study on the sliding mode control method for the active suspension system. International Journal of Applied Science and Engineering. 18, 021069. https://doi.org/10.6703/IJASE.202109_18(5).006 [7] Huihui Pan, Weichao Sun, Xingjian Jing, Huijun Gao, Jianyong Yao, \"Adaptive tracking control for active suspension systems with non-ideal actuators\", Journal of Sound and Vibration, Volume 399,2017, Pages 2-20, https://doi.org/10.1016/j.jsv.2017.03.011. [8] Ngoc, Nguyen & Nguyen, Tuan Anh & Duyen, Dang. (2022). A Novel Sliding Mode Control Algorithm for an Active Suspension System Considering with the Hydraulic Actuator. Latin American Journal of Solids and Structures. 19. 10.1590/1679-78256883. [9] Tuan Anh Nguyen, \"Improving the Comfort of the Vehicle Based on Using the Active Suspension System Controlled by the Double-Integrated Controller\", Shock and Vibration, vol. 2021, Article ID 1426003, 11 pages, 2021. https://doi.org/10.1155/2021/1426003. [10] Han, Shi-Yuan & Dong, Jia-Feng & Zhou, Jin & Chen, Yue-Hui. (2022). Adaptive Fuzzy PID Control Strategy for Vehicle Active Suspension Based on Road Evaluation. Electronics. 11. 921. 10.3390/electronics11060921. [11] Mucka, P. Simulated road pro?les according to ISO 8608 in vibration analysis. J. Test. Eval. 2017, 46, 405–418. [12] Wang, Wei & Song, Yuling & Chen, Jun & Shi, Shuaibing. (2018). A novel optimal fuzzy integrated control method of active suspension system. Journal of the Brazilian Society of Mechanical Sciences and Engineering. 40. 10.1007/s40430-017-0932-4. [13] Maria-Geanina Unguritu, Teodor-Constantin Nichi?elea, Dan Seli?teanu, \"Design and Performance Assessment of Adaptive Harmonic Control for a Half-Car Active Suspension System\", Complexity, vol. 2022, Article ID 3190520, 14 pages, 2022. https://doi.org/10.1155/2022/3190520
Copyright
Copyright © 2023 Kaustubh D. Dandavate, Dr. Pravin R. Kale. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET56929
Publish Date : 2023-11-22
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online