

Ijraset Journal For Research in Applied Science and Engineering Technology
Craby Steering System
Authors: Bhavin Sanjay Darji, Shubham Viju Dhodi, Shashank Suni Jadhav, Ibrahim Akram Khan, M. A. Gulbarga
DOI Link: https://doi.org/10.22214/ijraset.2022.41851
Certificate: View Certificate
Abstract
In present the car steering system is 2 wheel steering system and in conventional steering system there are only two wheels are moving while taking the turn , either forward two or the rear two wheels . While in 4 wheel steering system the rear and front both wheels are act +ive and can guide in steering. Here we using MARUTI-800 car as a reference model. We have developed a optimized 4 wheel steering system for implementation of mechanism that can give the work in changing in-phase and counter-phase steering of rear wheels depending upon the condition of turning and lane changing with respect to front wheels, thus enhancing the manoeuvrability of as edan in accordance with its speed.
Introduction
I. INTRODUCTION
In current scenario most of the vehicles have only front wheels steering mechanism or use only front wheels for changing the direction of vehicles. But there are some limitations for this system, like less turning radios or front tyre wear due to more action of wheels, problem while get free from congested place etc.
To overcome these issues we introduce CRABY MECHANISM. This mechanism will help us to reduced this kind of problems by giving our vehicle front as wheel as horizontal movement . In this mechanism vehicle will free to move at very tight corners as well as at any directions. In order to reduce the turning radius of the vehicle we need the opposite phase configuration of four wheel steering system.
The main intension of this project is to reduce the turning radius of a vehicle as much as practically possible without crossing the practical limits of design and assembly of the components of the steering system. Based on these requirements, a four wheel symmetric steering system is analyzed using kinematic approach and a conclusion is drawn regarding the geometry of the optimum steering system and the effect of this on the turning radius of the vehicle. This system is seen not to cross any practical limitations of the vehicle in terms of assembly and spacing. Also the wheels are turned to the optimum extent possible and not exceeding this limit.
II. LITRATURE REVIEW
Er. Amitesh Kumar, Dr Dinesh N Kamble1 has discussed that, Conventional Steering mechanism involves either the use of Ackerman or Davis steering systems. The disadvantage associated with these systems is the minimum turning radius that is possible for the steering action. This difficulty that is associated with the conventional methods of steering is eliminated by employing a four wheel steering system.
Saket Bhishikar, Vatsal Gudhka, Neel Dalal, Paarth Mehta, Sunil Bhil, A.C. Mehta2 A has discussed that t, A model for 4WS system is created to test all the possible cases available in four wheel steering system. Four wheel steering system is critical and it is also popular in large farm vehicles and trucks.
Some of the modern steering found it most widespread use in monster trucks, intercity buses also utilizes four wheels steering to improve road stability. The four-wheel steering mechanism is developed so that both front and rear wheel actively participate during turning, lane changing.
Ravi Shankar, Kumar Saumya, Sujeet Kumar, Saurabh Kumar, Praveen Kumar , Jitendra Kumar , Ashis Saxena and Hitendra Bankoti 3: The rack and pinion mechanism is commonly used to convert the rotary motion into linear motion. This mechanism contains a circular gear and teeth on a linear shaft. The circular gear is called pinion and the teeth on a linear shaft is called a rack. The rack and pinion steering mechanism are simple in construction and friendly to drive. The mechanism consists of a pinion at the end of the steering column that meshes with the rack. The pinion is fixed to the steering column at its end. As the pinion is in contact with the rack, the rotary motion given to pinion is converted to linear motion by the rack. To meet all the steering requirements the rack and pinion steering must be precise and direct under normal driving conditions. A manual rack and pinion gear suitable for a solar car. It is found that the simulation results are higher than the theoretical calculations.
III. PROBLEMDEFINITION
A. Parking problem
The increase in the population and reduction in the free land for easy and wide parking is not possible now days.
B. Reduce Turning Radius
Because of high turning radius we cannot make turns easily like U-turn, zero turn.
C. Reduce Skidding at Curves
While taking sharp turn there is high chances of skidding at conventional steering system.
D. Reduce tire wear
By enabling the front and rear wheel to Take turn it reduce the tire wear while taking u turns or zero turns.
IV. THE CONCEPT
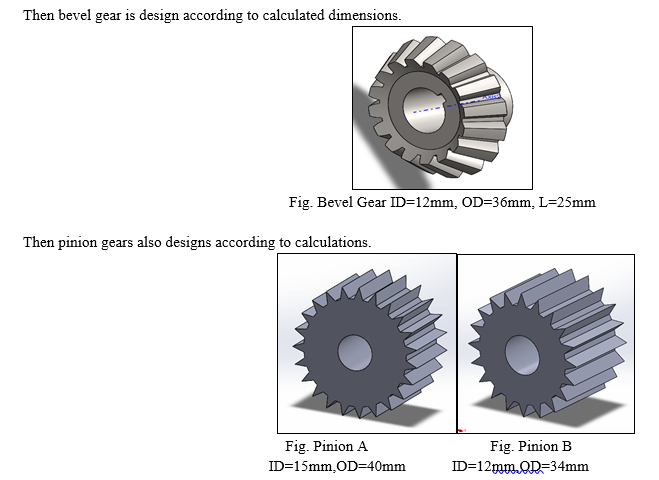
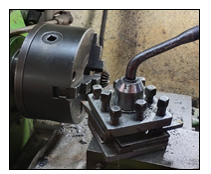
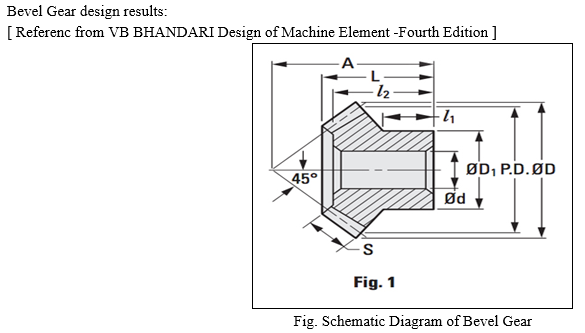
This project consist of one rack and pinion mechanism at centre, by using its motion we were able to create new steering mechanism which allows all wheel to rotate at 900. To create this mechanism we have used bevel gears shafts. First of all when we rotate steering wheel in clockwise direction that time pinion at the end of the steering wheel also start rotates by the help of two universal joints. This rotary motion is converted in to linear motion with the help of rack which is placed at the mid section of the frame. Over this rack we have placed one shaft which also contains one another pinion at the mid portion of the shaft. So the linear motion of the rack is transmit to the main shaft by the means of 2nd pinion. Now we attached a bevel gear at both the ends of main shaft to transmit this rotary motion toward wheels we have take another small shafts and that small shafts also contains bevel gears to transmit the motion towards the wheels. By using this mechanism we were able to rotate all the wheels at 900.
V. METHADOLOGY
- The literature reviews are studied completely and identified the problem statement.
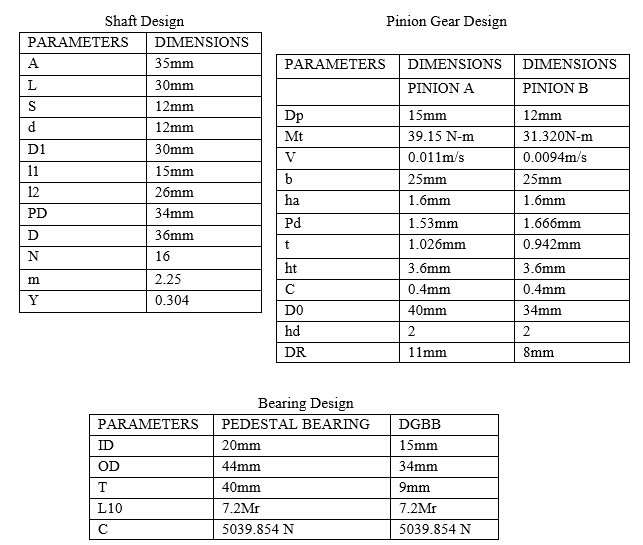
- The design parameters are taken from references and design calculations are done.
- With the design calculations 3D model is designed using SOLIDWORK software.
- The model is imported to SOLIDWORK2021 SIMULATION and static analysis is carried out with a mesh size of 1mm.
[With reference to static analysis , fatigue analysis is conducted]
A. Solidwork Steps
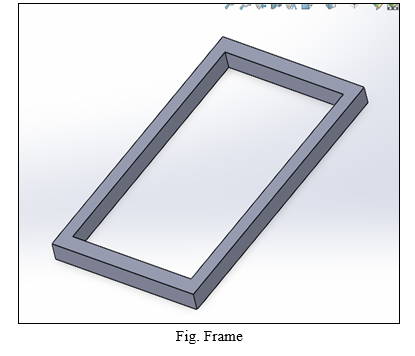
First of all Frame is made of size 3ft×2ft in rectangular shape as shown in figure.
VI. PROCEDURE TO MAKE THIS MECHANISM
- First of all M.S. square pipe of 3ft in length ,2ft in width and 50mm thickness frame has been cut by using grinding cutter machine.
- Then they are welded together to form a frame by using Metal arc welding (95to 100 amp rating).

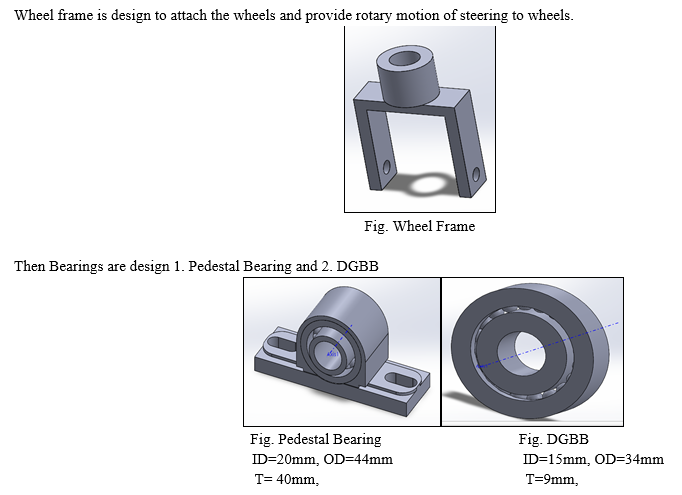
3. After frame gets welded then 4 pedestal bearing are placed to each corner and marking has been done for their fitting purpose.
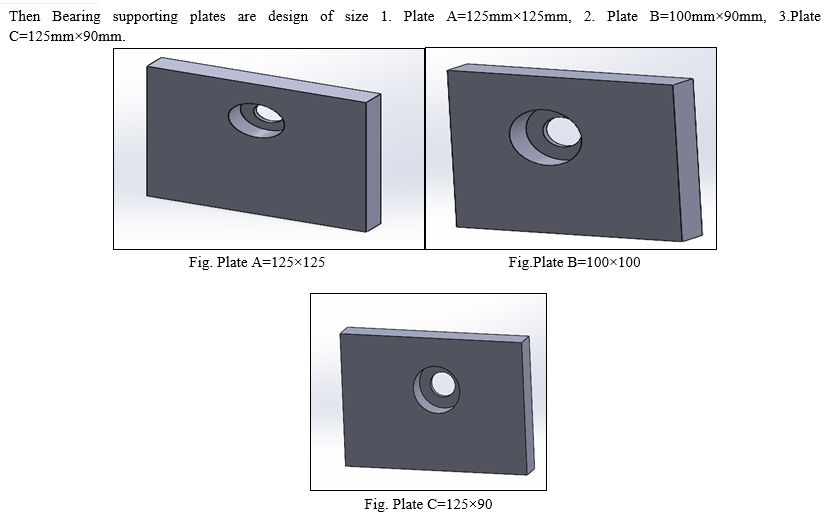
4. But square pipe alone is not capable to take load of pedestal in place of that 4 plates are cut of length 125 cm, 50mm width and 10mm thickness. On this plate marking of pedestal bolts marked and drilling operation performed for bolt size M10 then tapping operation performed with tap of D=10mm &P=1.5.
5. After tapping those plates are welded on frame and pedestals bearings are bolted like shown in figure.

6. Then supporting plates are mounted on lathe machine to make bearing size hole for DGBB bearing .Total 10 Plates are drill with bearing size holes.

7. Then the DGBB bearings are fitted in those plates by slightly hammering.
8. Then 4 shafts of 20mm diameter and 75 mm length are cut and on its one side. Gear’s inner diameter of 12mm is turned on lathe machine till the length of 30mm.
9. This shaft is mounted with one bevel gear and it is fitted in pedestal bearing.
10. Then 4-M.S. shaft diameter of 16mm and length 190mm are cut on its both end bevel gear are mounted by turning it to D=12mm and L=30mm.
11. Another D=-16mm,L=660mm M.S shaft is cut and it’s both ends are turned for bevel gear fitting.
12. After that supporting plates with bearing in it are welded with MAW. For supporting of this plates L-shape M.S. columns are used to give rigidity to plates.
13. Then shafts are placed through this metal plates and DGBB and gears are fitted.
14. To avoid slipping of gears on shaft gap screw are fitted by drilling and tapping the gears. 6mm drilled and tap of P=1 is used to create threaded hole for gap screw.
15. Hand drill machine is used to drill a small counters hole in each shaft to fit the bevel gears and shaft rigidity and gap screw of D=6mm , L=8mm of L.N key head is used (L.N KEY SIZE 3mm)
16. Then checks the rotation of all bevel gears, bearings and shaft then after checking middle shaft is removed for rack and pinion installation.,
17. Then pinion is mounted on middle shaft and measures the gap between pinion and frame. According to it sliding bars are selected of size 20mm*20mm square M.S. bright bar 2 pieces. Length 2ft.
18. For rack’s sliding moment2 holes are drilled from 65mm from it’s Centre on each side. A plate of size is width=25mm and length_185mm and thickness is 4mm is fitted.
19. Then those 20mm*20mm square bar are welded on frame and rack is mounted in it width contact with pinion fears.
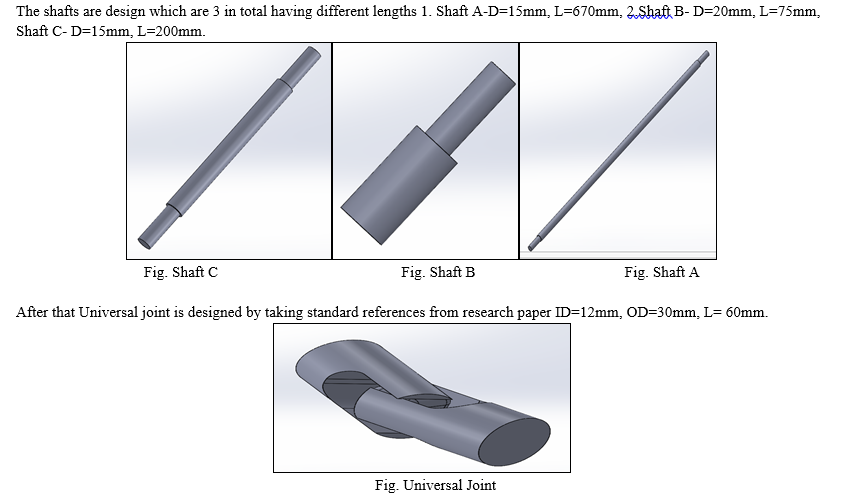
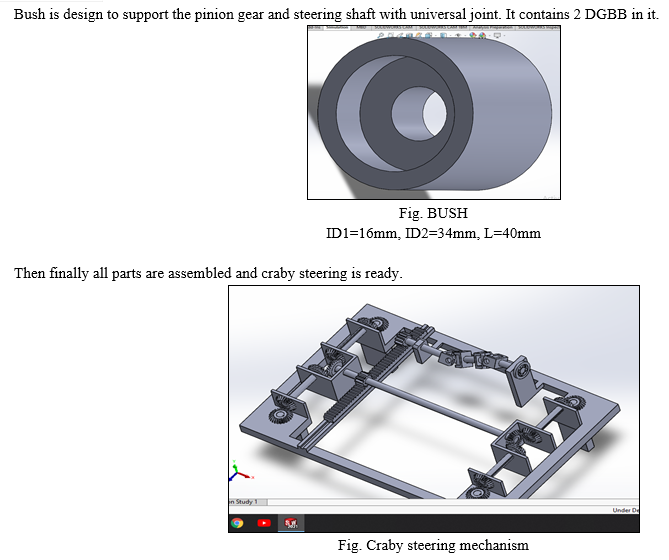
20. Now steering, for steering 2 universal shafts is used. D=16mm shaft is used From rack side another pinion gear is mounted with shaft D=16mm and L=130mm On this shaft one end is attached with pinion gears and another end with universal joint. To support this shaft one bush is made of M.S. material on D=40mm and length -38mm with both side DGBB bearings are fitted. On shaft grooves are made for circlip of size D=14mm, thickness-1mm.
21. To support this bush square pipe 30mm frame is made whose dimensions are height is 65mm and width is 165mm. This frame welded on main frame.
22. Then wheel frame is made and wheel is attached on it with M10 bolt of length 75mm with 2 washers on each side. This wheel frame is attached on diameter of 20mm shaft below the pedestal bearings with the help of screw.
23. For steering on another bush of D=30mm and L=35mm is used from another end of universal joint one shaft of 16mm diameter and length 400mm is attached with gap screw and on its other end steering wheel of size od=-250MM & ID=220mm on its center bush for steering is attached.
24. Then for finishing slightly grinding is done with hand grinder and glass white spray paint work is done.
25. Then by checking the rotation of wheels the rack is cut to suitable length and stoppers are mounted.
IX. FUTURE SCOPE
Having studied how 4WS has an effect on the vehicle’s stability and driver maneuverability, we now look at what the future will present us with. The successful implementation of 4 Wheel Steering using mechanical linkages & Electro-magnetic Clutch will result in the development of a vehicle with maximum driver maneuverability, uncompressed static stability, front and rear tracking, vehicular stability at high speed lane changing, smaller turning radius and improved parking assistance. Furthermore, the following system does not limit itself to the benchmark used in this project, but can be implemented over a wide range of automobiles, typically from hatchbacks to trucks. With concepts such as “ZERO TURN” drive as used in, Tata Pixel and “360º Turning” used in, Jeep Hurricane, when added to this system, it will further improve maneuverability and driver’s ease of access.
Conclusion
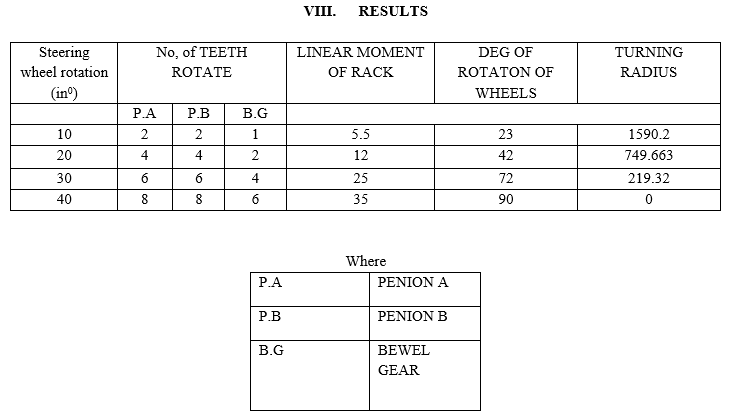
As per the focus of the project we have created an innovative 4 wheel active steering mechanism which is feasible to manufacture, easy to install and highly efficient in achieving in-phase and counter-phase rear steering with respect to the front wheels using bevel gears arrangement. This system assists in high speed lane changing and better cornering. It combats the problems faced in sharp turning. It reduces the turning circle radius of the car and gives better manoeuvrability and control while driving at high speeds, thus attaining neutral steering. Moreover components used in this system are easy to manufacture, material used is feasible, reliable and easily available in market. The system assembly is easy to install and light in weight and can be implemented in all sections of cars efficiently. The purpose of developing this mechanism is to solve the problem of car parking. 90 degree steering mechanism helps in minimizing the space and effort required for a person to park his vehicle. The 90 degree steering mechanism made using rack and pinion and with the help of differential gears is feasible to manufacture and is easy to switch between normal mode and parallel parking mode. However, a major disadvantage here is the limitation of top speed in such mechanism due to use of differential gears. Moreover, cars can be parked very close to each other. This may save costly parking space, In congested apartment complexes where parking is limited this mechanism can be very helpful and if our vehicle got stuck to some uneven road or surface then four wheels can be engaged to power mechanism and with this we can easily come out from that surface.
References
[1] Er. Amitesh Kumar, Dr Dinesh N Kamble “ ZERO TURN FOUR WHEEL STEERING SYSTEM” International Journal of Scientific & Engineering Research, Volume 5, Issue 12, December-2014 ISSN 2229-5518 [2] Saket Bhishikar, Vatsal Gudhka, Neel Dalal, Paarth Mehta, Sunil Bhil, A.C. Mehta “Design and Simulation of 4 Wheel Steering system“ International Journal of engineering and innovative technology (IJEIT), Volume 3, Issue 12, June 2014. [3] Ravi Shankar, Kumar Saumya, Sujeet Kumar, Saurabh Kumar, Praveen Kumar , Jitendra Kumar , Ashis Saxena and Hitendra Bankoti “Fabrication of modified steering and drive mechanism for turning wheels through 90 degree in parallel parking “International Journal on Emerging Technologies (Special Issue NCETST-2017) 8(1): 690-694(2017) (Published by Research Trend, Website: www.researchtrend.net) [4] V. Arvind, “Optimizing the turning radius of a vehicle using symmetric four wheel steering system”,International Journal of Scientific & Engineering Research, Volume 4, Issue 12, December-2013,ISSN 2229-5518. [5] Weblink:http://www.google.co.in/search/? [6] SaketBhishikar, VatsalGudhka, Neel Dalal, Paarth Mehta, Sunil Bhil, A.C. Mehta, “Design and simulation of 4 wheel steering system”, International Journal of Engineering and Innovative Technology (IJEIT) Volume 3, Issue 12, June 2014, ISSN: 2277-3754 [7] CREO 4.0 Software [8] ANSYS 16.1 Software [9] S.Nithyananth, A.Jagatheesh, K.Madan, B.Nirmalkumar “Convertable Four Wheels Steering With Three Mode Operation”, International Journal of Research In Aeronautical and Mechanical Engineering, Volume 2, Issue 3, March 2014, ISSN: 2321-3051 [10] Shijin T. G. , Sooraj V. T. , Shuaib A. V. , Shirin P. R. , M. Dinesh “ Four Wheels Steering Control With Three Mode Operation”, International Journal of Research In Aeronautical and Mechanical Engineering, Volume 2, Issue 3, March 2014, ISSN: 2321-3051 [8] Auto suspension and steering system ( Good heart willcox publication ) [11] Automotive engineering power train chassis system and vehicle body ( edited by David A. Crolla and published by ELSEVIER ) [12] Automobile engineering (J. P. Hadiya, H. G. Katariya and published by BOOKS INDIA) [11] ChetanDhuri, AdityaMasur, AniketWarang&Adityasudhir “Selection, Modification and Analysis of Steering Mechanism for an All Terrain Vehicle ”, International Journal on Theoretical and Applied Research In Mechanical Engineering(IJTARME), Volume 2, Issue 4, 2013, ISSN: 2319-3182. [13] Boby George, Akhil T Benny, AlbertJohn, Aswin Jose, Denny Francis “Design and Fabrication of Steering and Bracking System for All Terrain Vehicle ”, International Journal of Scientific & Engineering Research, Volume 7, Issue 3, March-2016, ISSN 2229-5518. [14] Unknown, Four wheel steering report, http://www.scribd.com/doc/34677964/FourWheel-Steering-report, Retrived on 13th Sep 2012. [15] Unknown, Four wheel steering, http://www.wisegeek.com/what-is-four-wheelsteering.htm, Retrived on 13th Sep 2012. [16] Unknown, Four wheel steering, http://what-whenhow.com/automobile/four-wheel-steering-4wsautomobile/, Retrived on 14th Sep 2012. [17] “Honda Prelude Si 4WS: It Will Never Steer You Wrong,” Car and Driver, Vol. 33, No. 2, pps. 40- 45, August 1987. [18] Sano s et al, “Operational and design features of the steer angle dependent four wheel steering system.” 11th International conference on Experimental safety vehicles, Washington D C 1988, 5P. [19] Jack Erjavec., Automotive Technology, A System Approach, 5th Edition, 2010.
Copyright
Copyright © 2022 Bhavin Sanjay Darji, Shubham Viju Dhodi, Shashank Suni Jadhav, Ibrahim Akram Khan, M. A. Gulbarga. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41851
Publish Date : 2022-04-25
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online