

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Analysis of Surveillance Robot
Authors: Puja Lakare, Pranav Pharate, Pratik Khadkekar, Pragati Jadhav, Prof. A. P. Kaldate
DOI Link: https://doi.org/10.22214/ijraset.2022.41147
Certificate: View Certificate
Abstract
The main objective behind this paper is to develop a robot for surveillance in industrial & war areas. The project is designed to develop a robotic vehicle using android mobile. For remote operation attached with wireless camera for monitoring purpose. The robot along with camera wirelessly transmit real time video with low light vision capabilities. This is kind of robot will be helpful for spying purpose in war fields. The wi-fi technology is relatively new as compared to other technologies and there is huge potential of its growth and practical application. The security system then acts on these command and responds to the user. The ESP 32 camera is attached with security system for remote surveillance. This kind of robot will be controlled by a human operator, sometimes from a great distance.
Introduction
I. INTRODUCTION
Surveillance is a real time collection and analysis of data that is timely distributes the information to the operator. Surveillance in Defense Applications plays an important role for keeping an eye out in order to protect its citizens and take necessary actions. Surveillance is the task of monitoring the set of conditions. This generally occurs in a military scenario where surveillance war areas, adversary territory. Human surveillance is carried by experienced work forces in close sensitive areas so as to continually monitor for changes. Whereas there is always added risks of losing work force in the time of getting caught by the adversary. With advanced technology in pasted years, there it is possibility to monitor areas of importance remotely by the use of robots instead of human. Apart from the given advantages of not losing any work forces, physical and elegant robots can be used detect subtle elements that are not conspicuous to people..A surveillance robot is a partially automated machine that works as per instructed by operator and move to destination , Streaming video or pictures which can then analyzed by the operator. Surveillance is a crucial task, we cannot put someone life to risk, instead of that we can use this kind of robots which do not need sleep, they don’t get hungry, they don’t have emotions, they are just stick to their duties and follow the orders. Nothing can be more important than human life. Use of such robots can help to save many lives on border areas. And we can use this manpower in other tasks. Here we use an android device to control the robot. Connection is established to the micro-controller using wifi . The base part of robot consist of wheels, so they can travel on rough & watery surfaces also. So the one who is sitting on the output screen can have all the records of opponent activities. This kind of robots can easily replace the soldiers and industrial workers where human access is impossible at that time this robot perform their duty with better modifications. So in the future the warfare are handled by this kind of smart robots. Which minimize the life threats during wars. And in future instead of security guards we will use this kind of robots.
II. METHODOLOGY
In this project, we are using a Servo motor,ESP-32 camera module, L298N motor drive module, Battery to build this surveillance robot . The ESP-32 camera which we used over wifi and internet provides us a live feedback. The amazing part is here that, we can control the whole setup from an android device. By using this data, the user gives further commands to the robot.The robot has 4 main controls forward, backward, turn left, turn right. The datacaptured through camera module is sent to the operating device. The speciality about this camera is that it can capture anything from bottom to top.
A. Camera Module
Cam module is a wifi camera, which is capable of doing live stream to the output screen. This camera connects to the internet over wifi and after that it generate an IP address where we can actually see the live feed by camera. This camera covers the activities in its field and display it to the user. This type of technique can be better in some cases than human eye, we can record all the activities by the opponent, hence we have proof of all of its activities . this camera is connected to the Arduino and controlled by the remote or mobile . The servo motor is connected to this camera so it can rotate easily.
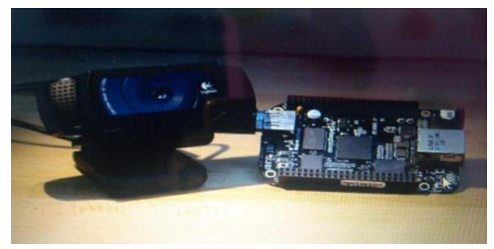
Fig.a Cam Module
B. Mini Breadboard
A breadboard is a rectangular plastic board with a bunch of tiny holes in it. These holes let you easily insert electronic component. The connection are not permanent, so it is easy to remove a component if you make a mistake.

Fig.b Mini Breadboard
C. DC Motor
It is an electrical component which converts current into mechanical power. When current is supplied to the coordinate, mechanical power follows it due to the electromagnetic impact on it. Dc motor is used to drive the robot for that we Use 500 rpm 4 dc motor. The speed of motor is depending on diameter of wheel and Rpm of motor. Rpm is inversely proportional to torque. If the speed of motor is gradually increase torque of motor will be decreases.

Fig.c DC Motors
D. Chassis
It is very essential in robots as well as many mechanical devices. Robot chassis is particularly designed for robots and other mechanical devices. These accessories handle components and parts that are interfaced and connected to it.

Fig,d, Chassis Body
E. Wheel
Generally the base wheel is made up of plastic or metal alloys, while the rollers are made up of high traction material to provide more coefficient of friction. The wheels on each side of the robot may be individually driven by separate motors, a single motor to power one wheel on each side

Fig.e Wheels
F. Servo Motors
A servo motor is a type of motor, which provide precise actions and rotations. It provide precise control of angular position and acceleration. It requires a dedicated module to control the actions.We also used the DC motors for the wheels. So it can rotate at required speed and provide good speed to the robot.
G. CP2102 Module
CP2102 chip is a single chip USB to UART bridge IC. It requires minimul external components. It can be used to migrate legacy serial port based devices to USB. It is highly integrated, built-inUSB20 full speed function controller.
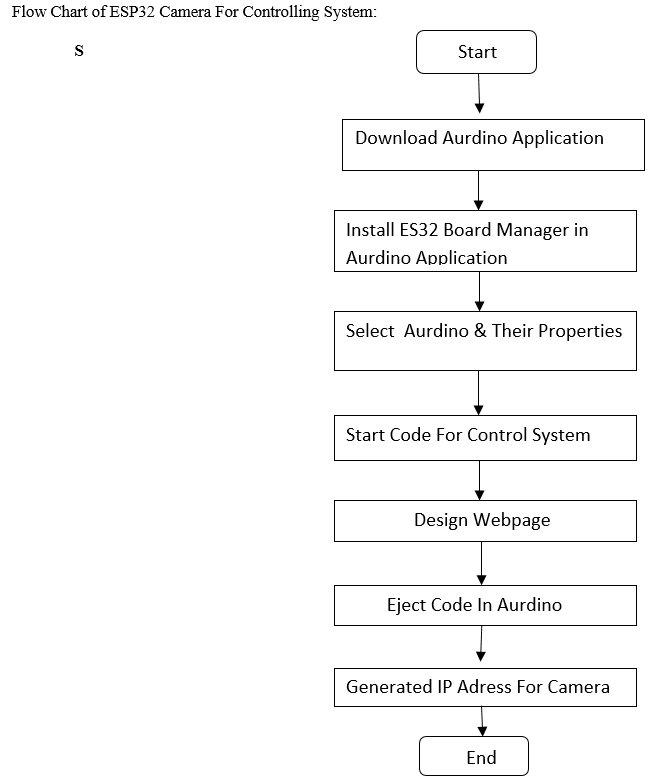
H. Web Application
The web page designing is main part of our project to control robot from any remote area. It will be necessary that to make one platform from there we will access our robot. From the web page we control the direction of motor and position of camera as well as monitor the live feed.It will be necessary that make our web page secure from anyone. To make it secure we will keep IP address highly confidencial. When authorized person want to get access on the robot he will be login that page and enter the static IP address and authorized user get the access of that robot.
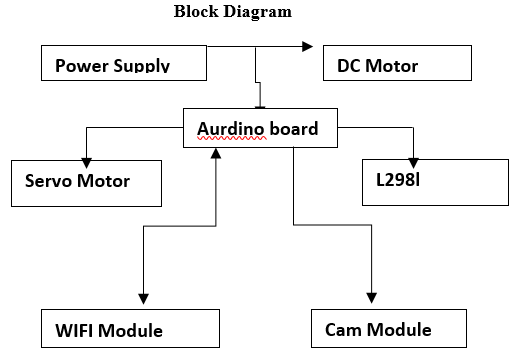
III. SYSTEM CONTROLLER DIAGRAM
A. Analysis
For analysis of this project ansys software has been used. ANSYS is a general-purpose, finite-element modeling package for numerically solving a wide variety of mechanical problems. These problems include static/dynamic, structural analysis, heat transfer, and fluid problems, as well as acoustic and electromagnetic problems. The meshing here is 2mm size for proper discrimination of the design & given fixed support to the holes. During analysis all degree of freedom were constained for holes then applied 9.8N force as per design consideration on the face. The material considered is structural steel . Analysis of the chasis taking different conditions are shown in below figures.
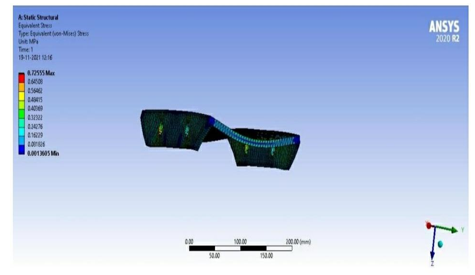
Fig.a
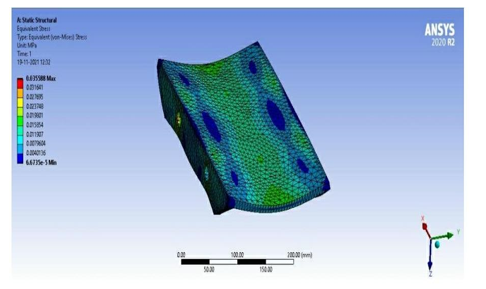
Fig.b
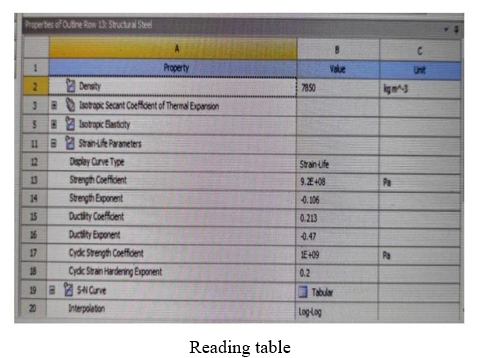
Reading table
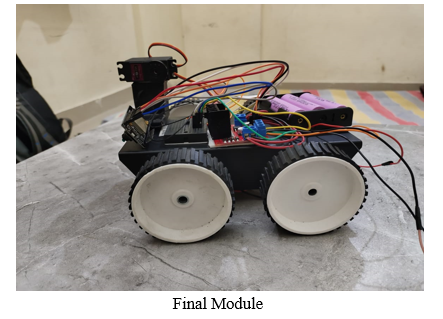
B. Fabrication Part & Final Module
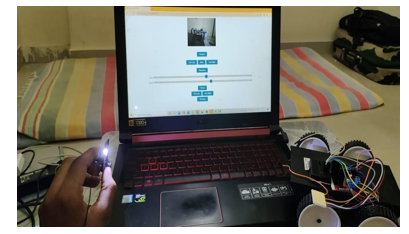
System Check
Conclusion
In this project, we made the surveillance robot used in war areas & industrial areas. In this project we design webpage to control the robot. our robot is small in size & light in weight so it is easy to operate into area where human access is impossible & this kind of robot also saves humans lives. We use wifi technology which capture live image & immidiately send to the organization by using ESP32 camera.
References
[1] N. Sebastian, E. Listijorini and S. Dw., “Designing and Prototyping Surveillance Robot with Self – Protection using Nail Gun’’, Journal of Applied Mechanics and Materials, Vol. 493, pp. 401-407, January, 2014. [2] K. Shantanu and S. Dhayagonde, “Design and Implementation of E-Surveillance Robot for Video Monitoring and Living Body Detection’’, International Journal of Scientific and Research Publications (IJSRP), Vol. 4, Issue. 4, pp. 1-3, April, 2014. [3] Ch. Kulkarni, S. Grama, P. Gubbi, Ch. Krishna and J. Antony, “Surveillance Robot Using Arduino Microcontroller, Android APIs and the Internet’’, IEEE International Conference on Systems Informatics, Modeling and Simulation, pp. 83 – 87, 2014. [4] S. Maroof, K. Sufiyan, A. Ali, M. Ibrahim and K. Bodke, “Wireless Video Surveillance Robot Controlled Using Android Mobile Device’’, JAFRSE, Vol. 1, special Issue, 2015. [5] B. Manisha, “Android Mobile Phone Controlled Wi-Fi Robot”, International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE), Vol. 4, Issue. 6, pp. 1697-1701, June, 2015.
Copyright
Copyright © 2022 Puja Lakare, Pranav Pharate, Pratik Khadkekar, Pragati Jadhav, Prof. A. P. Kaldate . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41147
Publish Date : 2022-03-31
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online