

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Development of E-Kart
Authors: Prof. Mayur Shelke, Ashutosh Dikondwar, Atharva Patil, Gokul Goyte, Vivek Tapase, Ankush Dahake, Akash Wase
DOI Link: https://doi.org/10.22214/ijraset.2022.41185
Certificate: View Certificate
Abstract
This paper represents the design and development of E-kart. This is Electric kart powered using batteries and motor and there won\'t be any harmful hazardous gases emissions with this kart this is the main objective behind development of the kart. In this kart we have used BLDC motor and lithium ion batteries. The motor used is 900 watt power and the batteries are 27 amp each we have use four batteries. The batteries are rechargeable. The chassis made of AISI 4130 material and it weighs around 18 kg and the whole kart is about 140 kg. This paper includes design and calculation of all components like batteries, motor, brake, etc. The maximum speed of the kart is 40 km/hr i.e. 11.11 m/s. It can go up to 45 km the motor is of 1.20 hp. International standards were followed for all the calculations.
Introduction
I. INTRODUCTION
The first go-kart was invented by Art ingles in 1955, the go-karts are powered by fossil fuels which leads to emission of harmful hazardous gases like carbon monoxide, nitrogen oxides, hydrocarbons, etc. Whereas E-kart are powered by batteries and motors so there will not be any emission ans do not cause any harm to atmosphere. In this project we aimed to design and develop a electric kart and this paper represents the design and calculation of the E-kart. The material used for the chassis we used is AISI 4130 in this chassis has been welded through MIG welding. The material we used is flexible as well as tough so that it can sustain all the weight and shock. And we compared this AISI material with other materials and found that AISI 4130 is the best for the chassis. The chassis we used is three dimensional chassis. The material AISI 4130 is a low alloy steel containing molybdenum and chromium as a strengthen agent. The steering system is Ackerman steering system. Because Ackerman principal prevent tyres from sliding outward. The motor used is BLDC motor this motor has high speed and torque. And the battery used is lithium ion battery which is rechargeable battery. I. The braking system used is disc brakes these are the type of brake which uses callipers.
II. LITERATURE VIEW
“ELECTRIC VEHICLE TECHNOLOGY EXPLAINED” by J. Ma, John Wiley and John Lowry published by John Wiley and sons limited.
Year of publication : 2017
The manufactured Electric Vehicle is in line with reality, according to the test findings, and measuring the EV's energy consumption per kilometre, driving range, and equivalent emissions using official driving cycles results in huge relative mistakes.
Prof. Nirmal Chohaun has written report on “DESIGN AND FABRICATION OF ELECTRIC
GO-KART” published on IRJET.
Year of publication : 15 SEP 2020
The goal of this report is to design and build a working model of an electric go-kart. The go-design kart's and construction are basic enough that even nonprofessional drivers can run it. The design is based on the vehicle's great strength, which allows it to carry more weight and deliver the best services at a low cost.
D. Karale, S. Thakre, M. Deshmukh “DESIGN AND ANALYSIS OF ELECTRIC VEHICLE”,
IJOI vol.4.
Year of publication : 2020
The EV's chassis was designed and developed based on assumptions about the vehicle's gross weight for carrying a suitable size of sprayer attachment, taking into account the agronomical requirements of the field crops available in the region, and validated using the Finite Element Method (FEM) with ANSIS software.
“ACKERMAN STEERING GEOMETRY” by
Jonathan Vogel.
Year of publication : 2017
Steering geometry is one of the many options available to race car designers to guarantee that the car gets the most out of all of its tyres. The geometric setup that allows both front wheels to be steer at a definite angle to avoid tyre slippage is known as Ackermann Steering.
"Electric-Solar Vehicle Steering Mechanism Design and Analysis" M. A. Hmed, M. A. Ubin, A. Haik, M. A. Hmed, M. A. Ubin, M. A. Ubin, M. A. Ubin,
The purpose of this research is to construct and evaluate a steering system for an electric solar vehicle. The steering mechanism is taken into account using the Ackerman steering theory. The steering effort is made to the steering wheel to rotate the rack shaft, which is connected to a pinion gear that converts rotary motion into linear motion through the rack and pinion steering system, which aids in vehicle steering smoothness.
“Electrical Motors for Electric Vehicle – A Comparative Study” by P. Bhatt, Hemant Mehar, M. Sahajwani published on SSRN Electronic Journal.
Year of publication : 3 April 2019
A comparison of the most common kinds of electric motors in use across time is offered, along with their efficiency, power density, reliability, and size.
A article published by RATHEESH NAIR in Evreporter-e-magazine on.
Year of publication : March 2017
Electric power trains are more efficient and environmentally friendlier than gasoline locomotives. Advanced motors and motor controllers are responsible for the performance and efficiency of electric power trains. BLDCM (Brush Less Direct Current Motor) or PMSM is used in the majority of electric power trains nowadays (Permanent Magnet Synchronous Motor). In comparison to traditional motors, these motors are highly light and efficient, and a motor controller is required for them to function.
“A FUTURE FOR SOLID STATE BATTERIES” by J. Janek, Wolfgang G. Zeier
Year of publication : 2016.
Solid-state batteries have recently attracted great interest as potentially safe and stable high-energy storage systems. However, key issues remain unsolved, hindering full-scale commercialization.
W.Salah, M Albreem “CONTROLLERS FOR ELECTRIC VEHICLE TECHNOLOGY” by
IJOPE,
Year of publication : 1 MAR 2019.
The use of digital signal controllers compared with conventional control systems minimizes the motor’s total harmonic distortion, lowers operating temperatures, and produces high efficiency and power factor ratings.
III. CALCULATIONS
A. Design and Calculation of Knuckle Joint
- Design of Knuckle Joint
Knuckle joint has three main parts which are knuckle pin, eye end and fork (stub axle). It is used to connect front wheels with the chassis.
(All design and calculations are done as per design standards)
a. The diameter of rod, d= 17 mm
b. Thickness of eye end, t=1.2*d
= 20.4 mm
c. Outside diameter of eye end,
D1 = 2d
= 34 mm
d. Diameter of knuckle pin,
Dp = d= 17 mm
e. Diameter of knuckle pin head and collar,
D2 = 1.5*d
= 25.5 mm
f. Thickness of fork,
T2 = 0.75*d
= 12.75 mm
g. Thickness of knuckle pin head and collar,
T3 = 0.5*d
= 8.5 mm
h. Thickness of eye end,
T1 = 1.2*d
= 20.4 mm
i. Length of eye end,
L1 = 4.8*d

2. Analysis of Knuckle Joint
Structural Analysis Of Stub Arm Of Knuckle
Mass (in kg) on the front side of the vehicle is 56 kg, thus weight on one wheel stub axle would be half of the front weight.
a. Normal force on stub arm,
N= m*g
= 56*9.81
= 549.36 N
b. Lateral force on stub arm,
F= mv2/r
= 2160.06 N
Since, the load applied on both front wheels, so on one stub arm half load with factor of safety was taken.
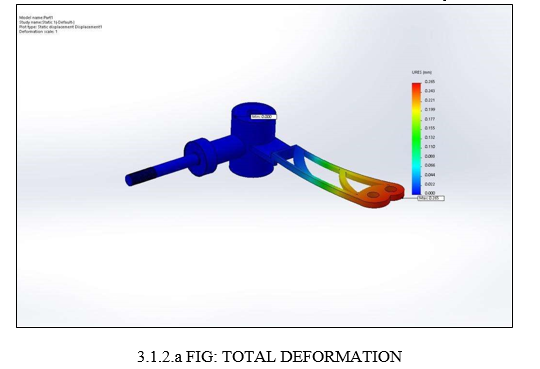
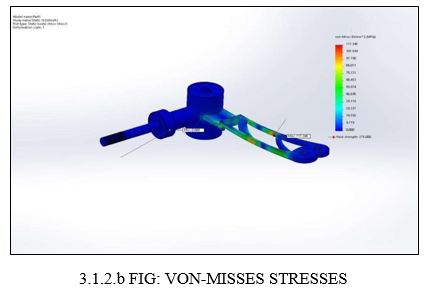
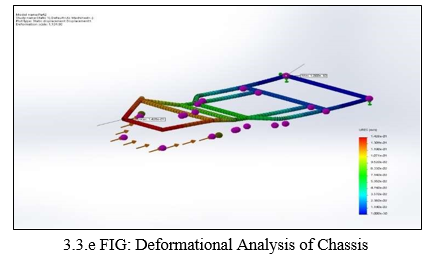
Lateral force of 1080.03 N is applied on a stub arm, thus 0.265 mm of deformation is occurred. Internal stresses generated due to load is 117.348 MPa.
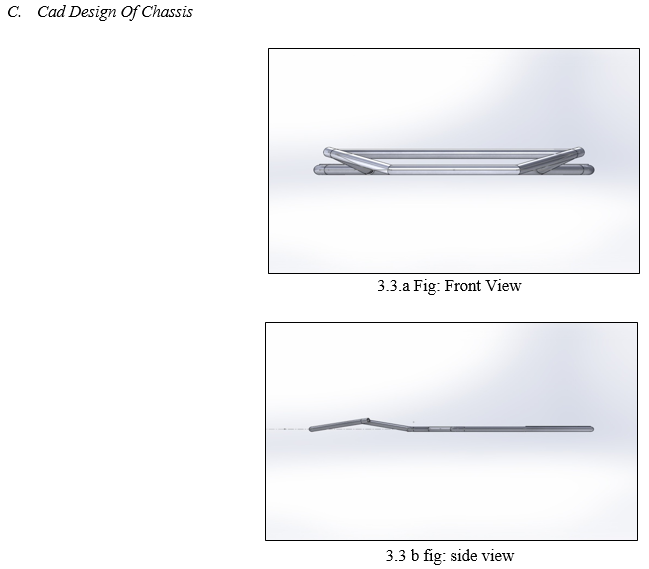
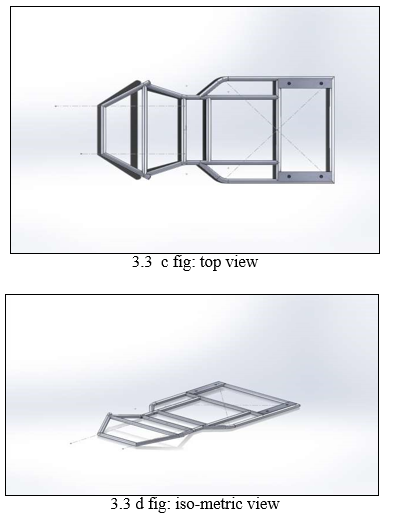
B. Design of Chassis
Chassis is the main component of any vehicle on which mounting of parts are placed. It should have high strength and stiffness, stability, torsional rigidity as well as it should resist the thermal stresses generated due to load. The following factors are considered to select the material for chassis
- Purpose of utility
- Strength
- Weight
- Cost
- Size
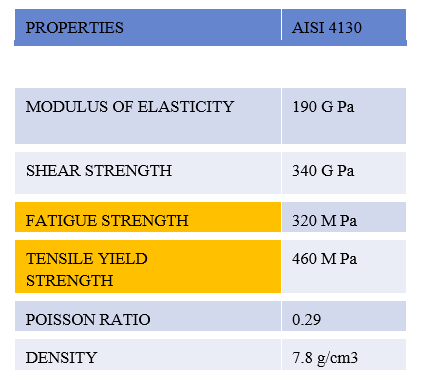
The material selected for design of chassis is AISI4130 an alloy steel. The total weight of the chassis is 18.016 kg.
The properties of material for selection of chassis are as follows:
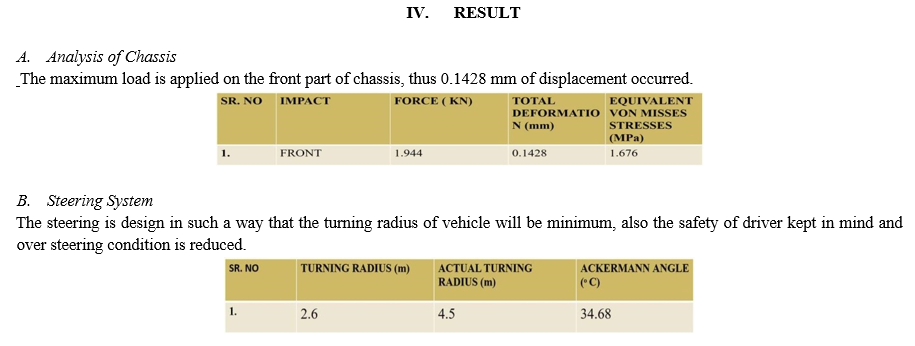
1. Calculation of Front Impact Test
For the front impact during collision, the force is acting on frontal members of chassis and rear end is kept fixed. Front impact was calculated for maximum speed of 40 km/h of the vehicle. Time of impact is considered as 0.8 sec. From impulse momentum equation,
F x t = m x (Vi – Vf)
F x 0.8 = 140 x (11.11 – 0)
F = 1.944 KN
2. Rear Impact Test
Consider the worst case collision for rear impact test, the force is calculated similar to front impact test. Force was calculated in rear impact for optimum speed of 40 km/h and time of 0.8 sec.
Using impulse momentum equation,
F x t = m x (Vi – Vf)
F x 0.8 = 140 x (11.11 – 0)
F = 1.944 KN
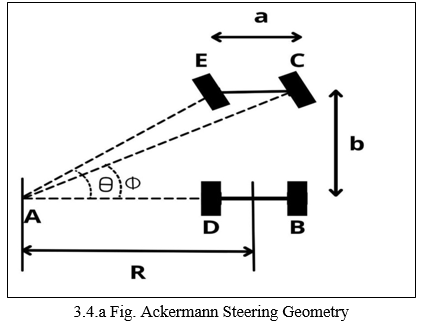
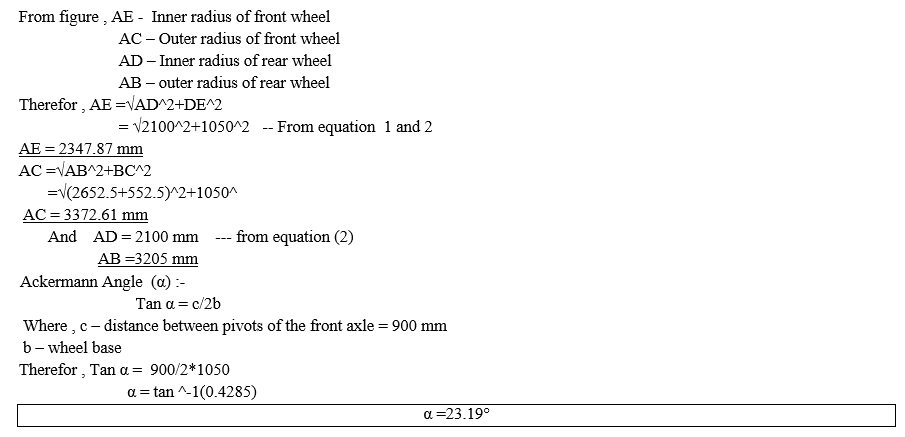
D. Design of Steering
In our E-kart project we are using Ackermann steering system . This system is used because turning time of vehicles Ackermann steering geometry prevents the tyre from sliding outwards. Ackermann steering system uses shorter tyre rods and with the help of shorter tyre rods the capacity to control the vehicle increases.
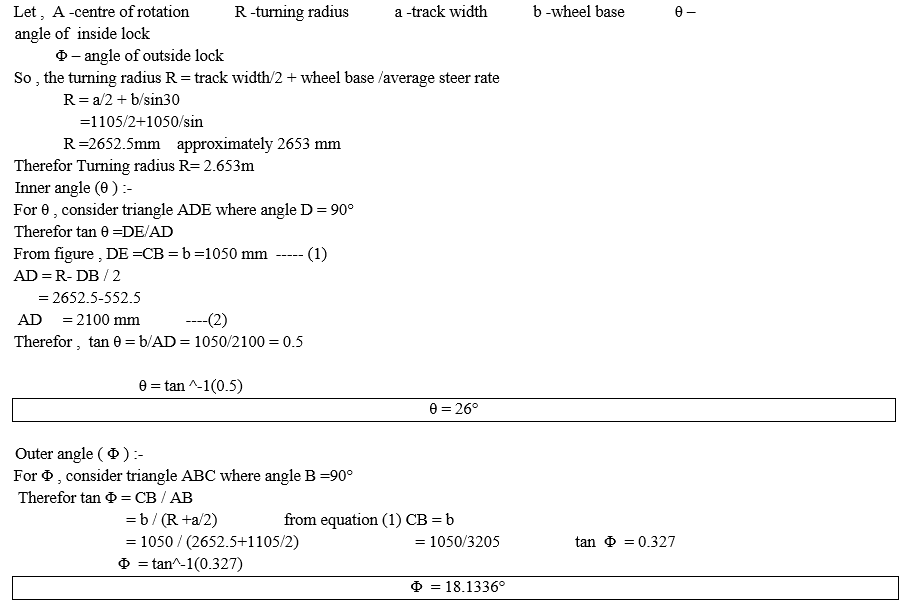
Steering system calculation are as follows :-
While the designing of Ackermann steering system the satisfaction of the driver and also the safety of driver is considered. So , the following parameter are set up , a = Wheel track width =1105mm b = Wheel base =1050mm
By using geometric relation , for validation of result more analytical approach is applied. Ackermann steering calculation are performed to find the turn radius as well as the turning angles of the car.
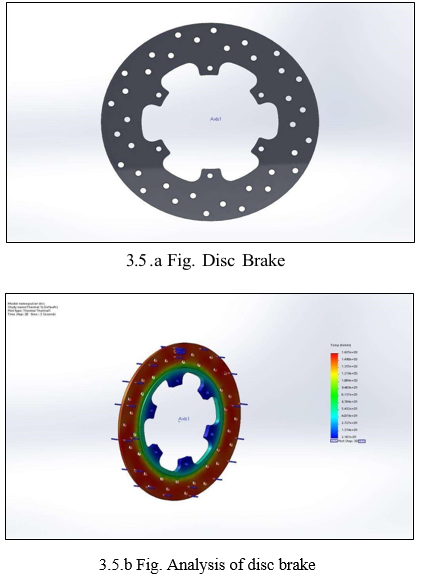
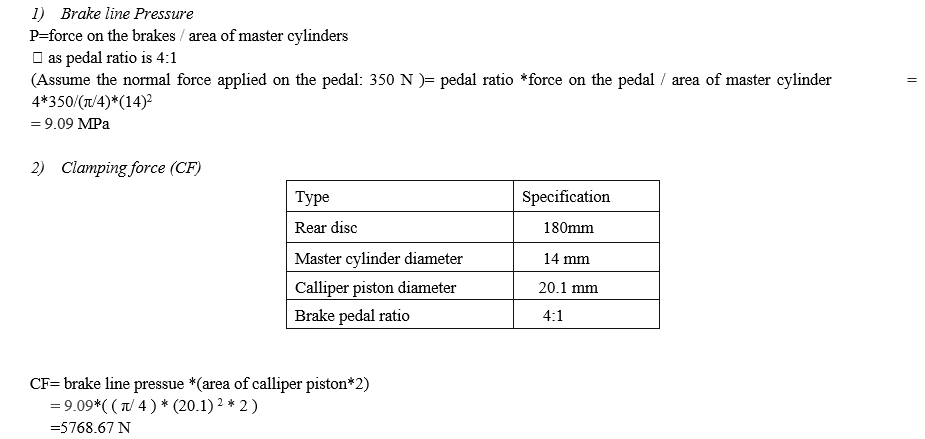
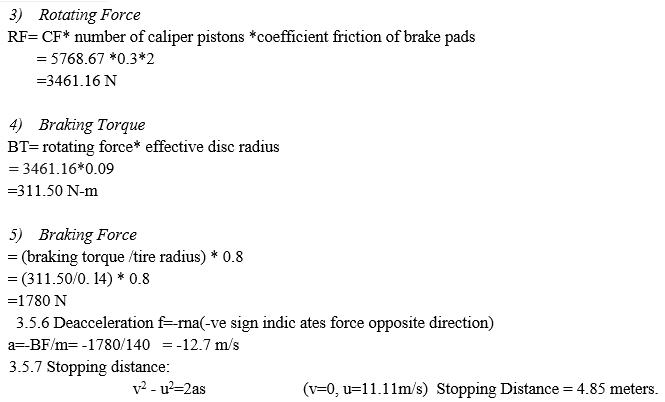
E. Braking System Design
The braking system used is Disc brake as it is very efficient.
Conclusion
When compared to AISI 1020, AISI 4130 is a better material in terms of strength, reliability, and performance. It can also be used in large-scale manufacturing. The chassis of a CAD modal was successfully analysed using SOLIDWORKS to determine equivalent stresses and total deformation results. The electric motor, battery and drive train have been chosen to provide maximum performance in terms of both speed and battery efficiency. When approaching a turn, the steering system designed for the kart requires less effort. After all of the calculations and analysis, it has been determined that this go-kart is safe to fabricate under healthy engineering conditions. Practices are followed, and the performance goals are met.
References
[1] Prof. Nirmal Chohaun has written report on “DESIGN AND FABRICATION OF ELECTRIC GO-KART” published on researchgate.com [2] “ELECTRIC VEHICLE TECHNOLOGY EXPLAINED” by J. Ma and John Lowry published 2012 by John Wiley and sons limited. [3] D. Karale, S. Thakre, M. Deshmukh “DESIGN AND ANALYSIS OF ELECTRIC VEHICLE”, IJOI vol.4, 1 OCT 2020. [4] Koustubh Hajare, Yuvraj Shet, Ankush Khot, “A Review Paper on Design and Analysis of a Go-Kart Chassis” International Journal of Engineering Technology, Management and Applied Sciences, ISSN 2349 -4476, Volume 4, Issue 2, Feb 2016. [5] “Design and Analysis of Steering Mechanism for Electric-Solar Vehicle” A. Haik, M. A. Hmed, M. A. Ubin, 2017. [6] “A FUTURE FOR SOLID STATE BATTERIES” by J. Janek, Wolfgang G. Zeier in 2016. [7] “Electrical Motors for Electric Vehicle – A Comparative Study” by P. Bhatt, Hemant Mehar, M. Sahajwani published on SSRN Electronic Journal, 3 April 2019. [8] SKDC season IV Rulebook by “SOCIETY OF MECHANICAL AND AUTOMOTIVE ENGINEERS”. [9] Mahindra-Treo and E-Alfa mini eBorchure by “TECH MAHINDRA”. [10] Maxi E-Rikshaw eBrochure by TRINITY ELECTRIC PVT. LTD.
Copyright
Copyright © 2022 Prof. Mayur Shelke, Ashutosh Dikondwar, Atharva Patil, Gokul Goyte, Vivek Tapase, Ankush Dahake, Akash Wase. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41185
Publish Date : 2022-04-02
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online