

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Development of Floor Cleaning Robot
Authors: Seshahari Varma Chekuri, Rahul Chinchole, Mohammed Muntasir Khalifa, Prof. Rachayya Arakerimath
DOI Link: https://doi.org/10.22214/ijraset.2022.42860
Certificate: View Certificate
Abstract
Robots are being extensively used in various fields of work. They have taken over dangerous, boring, and monotonous jobs. While cleaning is still done with the help of maids and janitors in institutes and big building complexes which strains and tires them. Hence the need for an autonomous floor cleaning robot. The existing floor cleaning robots are bulky and are not very user-friendly. They tend to be on the expensive end. Our project aims at providing a solution at lower cost, better integration with the help of IoT and better overall user-friendliness.
Introduction
I. INTRODUCTION
Cleanliness is the activity of creating a clean, beautiful, green and comfortable environment. Cleanliness, of course, is not only in one place, for example, cleanliness of the office, namely cleanliness of the place of work, cleanliness of the school. Cleanliness is an important aspect of human life and is an interconnected element in health science. The job of cleaning the floor of a room may seem very simple, but actually it consumes a lot of time and energy. Human limitations and lifestyles that do not care about the cleanliness of the surrounding environment, as well as technological limitations that may be a factor for someone to not pay attention to the cleanliness of their environment.
II. PROBLEM STATEMENT
Since there is a possibility for lots of problems to occur during the floor cleaning process, like human error as well as systematic error may occur during cleaning of the floor. In order to clean every corner efficiently and clean the floor we designed a robot which can do the work regarding cleaning manually as well automatically.
Nowadays, people lead a busy life. People in urbans have long working hours. In such a situation an individual will always find ways of saving time as well as reduce the user's efforts .
- For career oriented women it is difficult to handle home together with job work.
- Normally the floor is cleaned with the use of a dry mopper or a wet mopper using the hand as a base tool. They need to be scrubbed hard on the surface.
- The cleaning module includes cleaning of varied surfaces like cement floors, rough surfaces, highly polished wooden and marble floors.
- The rough surface areas like concrete floor, are covered with heavy dust which consumes longer time in cleaning and it also consumes human energy.
III. SOLUTION STRATEGY
A. For time saving purposes this House Cleaning Robot is an ideal solution as it will save time as well as reduce human intervention.
B. Autonomous robots for floor cleaning applications reduce much time as well as human effort in existence. It does sweeping and mopping tasks at a time, it also detects obstacles in the path, and has an automatic water sprayer which is used for the projection of water. Also, the blower makes sure that the floor drains as soon as possible
C. Automated Floor Cleaners are designed for cleaning homes, offices and can also be used in colleges. In one amongst the modes this robot is making decisions on the command of humans or various sensors are employed by this robot.
D. Manual or human work will be replaced by robot technology and lots of the related robot system applications are used.
IV. OBJECTIVES OF THE PROJECT
Objective of this project is to design an automatic floor cleaning robot in order to work in hazardous places and to decrease the need for human intervention. To develop an autonomous robotics system using the internet of things and to design a floor cleaning robot without human input. Mainly it is used when obstacles are less and a large area is required to be clean.
Its function is to aid in the cleaning of large floor areas where humans can get tired. In areas like nuclear plants or chemical industries the dangerous radiation, chemicals, air, and pollution can make a man sick or cause death. So this robot is applicable in those places. There are many features added in this project like a vacuum cleaner on the front side and a wiper motor and water pump in the middle for tightly wet cleaning of the floor. The vacuum sucks solid particles and cleans the floor after the wiper is tightly cleaned. Also, it has a blower at the end which drains the floor as early as possible.
A. Aid To Mankind
- It gives accurate results and eliminates the possibility of manual error.
- It is very first and efficient and the control system used in industries is 100 times more efficient than human work.
- In some parts of the work areas, it lessens human efforts.
- Washing machines come under this category.
- It also plays a great role in bringing entertainment in human life in different work. Television is the live example of these types of robots.
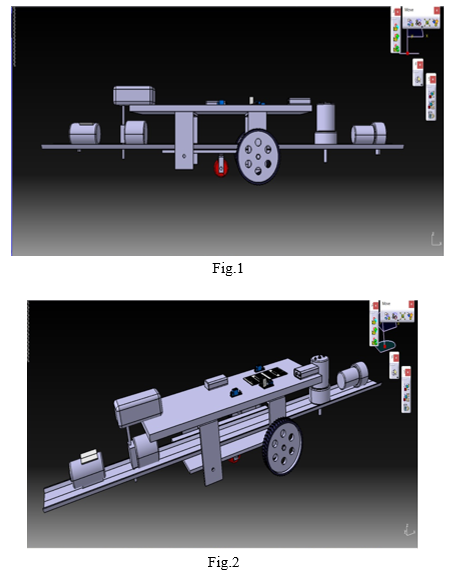
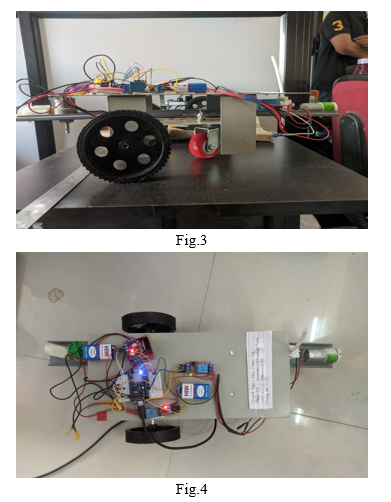
V. DESIGN AND SIMULATION
All the design process was done in house with the help of CAD software - CATIA V5 R21. Below are the attached CAD rendering of the floor cleaning autonomous robot
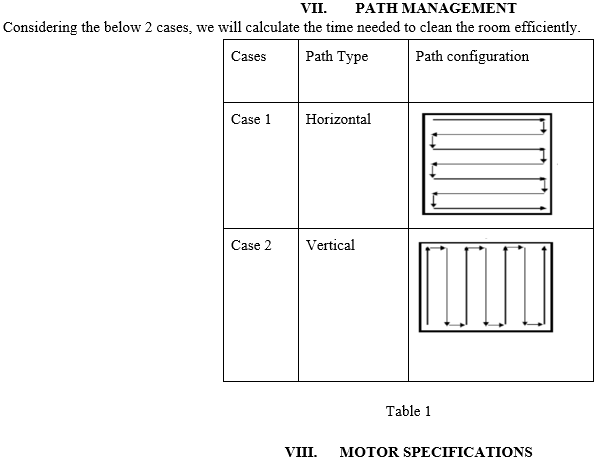
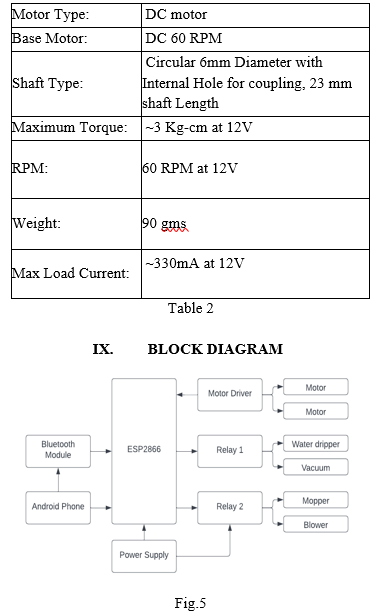
VI. FINAL ASSEMBLY
A. Calculating Time Required to Clean an Empty Room
- Room dimensions
Length of room (Assumption) = 10 m (L)
Breadth of room (Assumption) = 5 m (B)
2. Calculating the Speed of Robot
Number of drive motors = 2
Radius of drive wheel (R) = 0.055 m
RPM of each drive motor (N) = 60 RPM
Width of the robot (W) = 0.26 m
Speed (V) = R*ω
ω = (2*π*N)/60
ω = 6.28318 ≈ 6.28 radians/second
V = 0.345 m/s
Considering efficiency of power delivered to motor = 90%
Speed delivered or Speed of Robot (Vr) = V*0.9 = 0.310 m/s
3. Case 1(Horizontal configuration)
Number of passes required for robot to cover the entire room = Length of the room (L) / Width of the robot (W) = 5/0.26 = 19.23 passes ≈ 19 passes
Time taken by the robot to cover the room length once (t) = L / Vr = 10/0.310 = 32.25
seconds
Total time taken by the robot to cover the entire room =19*32 = 608 seconds ≈ 10.134 minutes ≈ 10 minutes 8 seconds (Max).
4. Case 2 (Vertical configuration)
Number of passes required for robot to cover the entire room = Breadth of the room (B) / Width of the robot (W) = 10/0.26 = 38.46 passes ≈ 38 passes
Time taken by the robot to cover the room width once (t) = W / Vr = 5/0.310 = 16.13
seconds
Total time taken by the robot to cover the entire room =38*16 = 608 seconds ≈ 10.134 minutes ≈ 10 minutes 8 seconds (Max).
B. Calculating Distance that can be Cleaned with Fully Charged Batteries
Considering Maximum load condition on motors,
current drawn by each motor = 1000 mA = 1A.
Operating temperature = 25 °C.
The discharge rate of 9 volts coppertop Duracell battery at 1-hour rate = 0.91 Ah.
The discharge rate for the whole system, is 6 Duracell batteries and four loads each drawing a current of 1 A
(4*0.91)/(4*1) = 0.91 hours ≈ 54.6 minutes
Since the battery shouldn’t run past 80% of its charge, leaving 20% left in the battery in order to use it for multiple cycles, time taken by the battery to discharge 80% of initial charge = 54.6*0.80 = 43.68 minutes
Since the number of motors is equal to the number of batteries which is equal to 4, considering each motor draws an equal current of 1A from different batteries, total runtime of the robot with fully charged batteries =43.68 minutes = 2620.8 seconds. Distance covered by robot = Velocity of robot (Vr) x Total runtime of robot = 0.315*2620.8 = 825.6 m
X. ACKNOWLEDGMENT
We would like to express our gratitude to our project guide Prof. Rachayya Arakerimath for their kind cooperation and encouragement which helped us in the completion of this project.
Conclusion
In this Project, we are focused on developing the Robot that can perform the following functions: 1) Detect the straight path and avoid obstacles 2) Collect dust by Vacuum 3) Pore water by pump 4) Mop the floor 5) Air blower. The robot is specially built on the use of modernized technology. It has all the features that are required for a floor cleaning robot. It works automatically and manually. It has a blower at the end which works as an auto drain feature. This could be locally manufactured with the help of local industries. This proposed robot reduces the cost and time of labor. This vacuum cleaner robot has been designed, fabricated, and tested. It has a disk/cuboid shape and sucks dirt via a vacuum pump The suction fan helps create a vacuum that sucks in dirt and stores it in the dust box. The robot navigates with a front caster wheel and two rear wheels and detects obstacles using ultrasonic sensors. It is powered by a 1500 mAh Duracell battery and works continuously for two hours when the embedded battery is fully charged. This project resulted in achieving the goals of developing an autonomous floor cleaning robot that can clean and maintain large floor spaces automatically and manually. The robot can be used in institutes while being totally connected via IOT, is user friendly and easy to use, and does not cost much to buy and use.
References
[1] Goon, L. H., Isa, A. N. I. M., Choong, C. H., & Othman, W. A. F. W. Development of Simple Automatic Floor Polisher Robot using Arduino. International Journal of Engineering Creativity & Innovation, 1(1), 2019, 17-23. [2] Kaur, M., & Abrol, P. Design and development of floor cleaner robot (automatic and manual). International Journal of Computer Applications, 2014, 97(19). [3] Sahu, N. K., Sharma, N. K., Khan, M. R., & Gautam, D. K. Comparative Study on Floor Cleaner. Journal of Pure Applied and Industrial Physics, 2018, 8(12), 233-236. [4] Liu, C. C., Kang, Y. P., & Yu, S. N. Hardware and software integration for domestic stairs cleaning robot. In SICE Annual Conference 2011 (pp. 663-670). IEEE. [5] Kukde, M., Nagpurkar, S., Dhakulkar, A., & Amdare, A. Automatic & manual vacuum cleaning robot. International Research Journal of Engineering and Technology (IRJET), 2018, 5(02), 2196-2198. [6] Muthugala, M. V. J., Vengadesh, A., Wu, X., Elara, M. R., Iwase, M., Sun, L., & Hao, J. Expressing attention requirement of a floor cleaning robot through interactive lights. Automation in Construction, 2020, 110, 103015. [7] Juang, H. S., & Lurrr, K. Y. Design and control of a two-wheel self balancing robot using the arduino microcontroller board. In 2013 10th IEEE International Conference (ICCA) (pp. 634-639). IEEE. [8] Al-Busaidi, A. M. Development of an educational environment for online control of a biped robot using MATLAB and Arduino. In 2012 9th France-Japan & 7th Europe-Asia Congress on Mechatronics (MECHATRONICS)/13th Int\'l Workshop on Research and Education in Mechatronics (REM), 2012 (pp. 337-344). IEEE. [9] Araújo, A., Portugal, D., Couceiro, M. S., & Rocha, R. P. Integrating Arduino-based educational mobile robots in ROS. Journal of Intelligent & Robotic Systems, 2015, 77(2), 281-298. [10] Gargava, P., Sindwani, K., & Soman, S. Controlling an arduino robot using Brain Computer Interface. In Proceedings of 3rd International Conference on Reliability, Infocom Technologies and Optimization (2014, pp. 1-5). IEEE. [11] Patil, D. A., Upadhye, M. Y., Kazi, F. S., & Singh, N. M. Multi-robot communication and target tracking system with controller design and implementation of swarm robot using Arduino. In 2015 International Conference on Industrial Instrumentation and Control (ICIC) (pp. 412-416). IEEE. [12] Irawan, Y., Fernando, Y., & Wahyuni, R. Detecting Heart Rate Using Pulse Sensor As Alternative Knowing Heart Condition. Journal of Applied Engineering and Technological Science (JAETS),2019, 1(1), pp 30-42. [13] M. Muthiah, K. Nirmal and R. Sathiendran, \"Low-cost radio frequency controlled robot for environmental cleaning,\" 2015 International Conference on Circuits, Power and Computing Technologies [ICCPCT-2015], Nagercoil, 2015, pp. 1-5, DOI: 10.1109/ICCPCT.2015.7159519.
Copyright
Copyright © 2022 Seshahari Varma Chekuri, Rahul Chinchole, Mohammed Muntasir Khalifa, Prof. Rachayya Arakerimath. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET42860
Publish Date : 2022-05-17
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online