

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Development of Real time Embedded system for Rear view camera Video signal processing for Driving safety
Authors: Chandana M G
DOI Link: https://doi.org/10.22214/ijraset.2022.45606
Certificate: View Certificate
Abstract
The use of vehicles in our life is increasing exponentially day by day and as increasing vehicles are violating the traffic rules, theft of vehicles, entering in restricted areas, high number of accidents lead to increase in the crime rates linearly. For any vehicle to be recognized, vehicle license plate detection will play a major significant role in this active world. For finding vehicles commonly used in field of security and safety system, LPDR plays a significant role and need to recognize vehicles registration number. The system includes a camera connected to Raspberry Pi which captures the video of moving vehicles. The number of the following vehicle is displayed and the vehicle image were viewed on a web page. The system implemented can be used to improve road safety.
Introduction
I. INTRODUCTION
Safe driving is the responsibility of all individuals who operate a vehicle on roads. The rules of the road must be obeyed at all times and laws must be strictly followed. A motorist must ensure the safety of all passengers who are riding in his/her vehicle and be mindful of the other motorist who share the road each day. Driving safety is very important particularly for women when they are driving alone in a highway or isolated roads.
Women drivers are still regarded as more vulnerable by most criminals. However considering the safety of the driver if any vehicle is following behind with the malicious intention, just to alert the driver real time system is needed. Driving safety includes surround object detection, collision detection etc. A back-up camera, also called reversing camera or rearview camera, is a camera attached to the rear of the vehicle.
It helps to see the area behind the car when backing up. ADAS algorithms estimates the time to potential collision (TTC) with the vehicle coming from behind, which can be seen by the driver using rear-view camera[2].
ALPR is still an open problem because of the huge diversity in image Acquisition state (lightning condition, capturing angle, distance from camera, clarity and quality of image in terms of resolution of pixels) and Number plate (NP) format, which differs for different countries[3].
The real-time vehicle detection and tracing is essential for intelligent road routing, road traffic control, road planning and so on. Recently, vehicle recognition system is used to detect the vehicles or detect the traffic lanes [6-10] or classify the type of vehicle class on highway roads like cars, motorbikes, vans, heavy goods vehicles (HGVs), buses and etc. Due to exponential growth in number of vehicles, VLPR is needed in automated traffic surveillance and vehicle monitoring[4]. In India, basically two types of number plates are used: - 1) white background with black letters on plate. 2) Yellow background with black letters on plate[10].Vehicles are identified by their license plate which is unique for every vehicle, hence identifying vehicles using a license plate is an efficient method. With the increasing number of vehicle in today’s world it’s not possible to manually keep a record of the entire vehicle. There need to be a man standing 24/7 to note down the number. It’s a time consuming process and require manpower. Number Plate Recognition is a special form of optical character recognition(OCR). The computer recognizes the string of characters from a vehicle’s number plate.
This system has a wide range of applications in the field of security, parking, charging for over speeding, identification of stolen cars, etc.
II. SYSTEM OVERVIEW
Fig. 1 represents the block diagram of the proposed system. The microcontroller used in this system is Raspberry pi 4 which has Broadcom BCM2711, 64-bit quad-core ARM processor. This board uses 3.3V to trigger and it also has 5V pins for external hardware connections. The inputs of this system are the video captured by the camera.
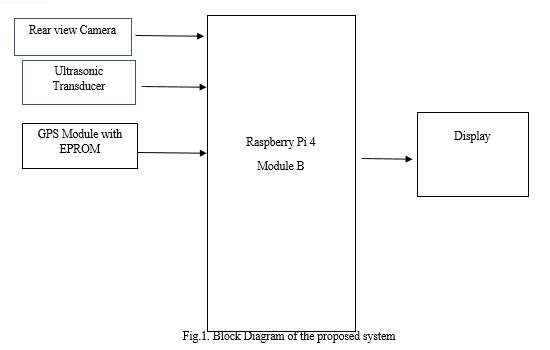
The rear view camera is capable of capturing video at resolution of 1080p. The camera is connected to the USB of Raspberry pi 4 board. Ultrasonic transducer measures the distance within 8-meter. This Ultrasonic transducer is connected to the board through wires and data is sent and receives through Trigger and Echo pins respectively. GPS Module with EPROM is used to find the current location. GPS module is a GPS receiver with a built in 25*25*4mm ceramic antenna, which provides strong satellite capability. EPROM is used for storing configuration setting. It is connected to the board through wires and data is send and receives through I2C protocol.
III. PROPOSED METHOD
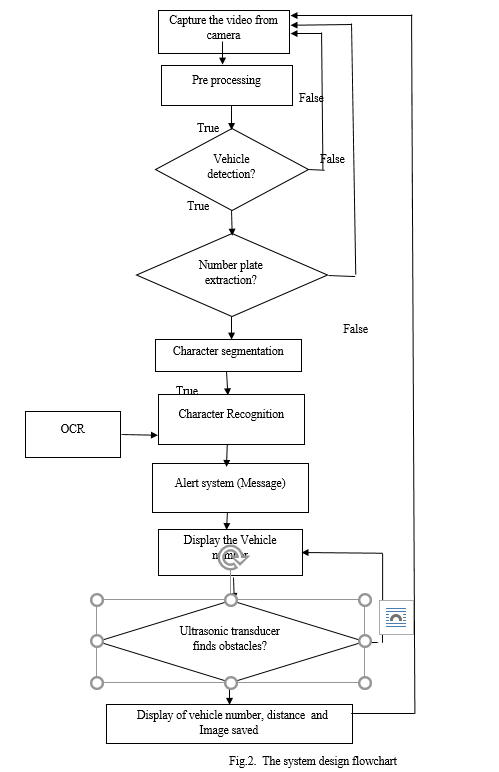
The camera used in the proposed system is Rear view camera of 6MP, which is capable of capturing 30 frames per second (fps). Fig. 2. represents the flow of the system. The video of the vehicle is captured with high resolution. The video is processed to improve the quality which involves background subtraction, enhancing contrast, sharpening or smoothing, and noise removal. The video is converted into frames and selected the frame which is clear. Converting RGB to grayscale image to reduce complexity and make easier. Bilateral filter is used for smoothening images and reducing noise, while preserving edges. Locates the presence of vehicle, identifies the moving vehicle. Upon sensing the vehicle, USB webcam sends the signal to Raspberry pi 4 and hence vehicle is detected.
The Number plate extraction can be achieved in 2 steps : 1)Determining the exact location of the number plate, 2) Locating a boundary rectangular box over the number plate. Canny edge detection method is used for better localization and works fine in noisy condition. Once the number plate is extracted, divide the number plate into different sub images, each sub images indicates one sub images. Segmentation is important part in VLPD system because character recognition completely depends on segmentation. If segmentation is not done properly, Recognition will not be accurate. Contours approximation method is used in segmentation process.
Contours is a line joining all the points along with boundary of the image. Each alphanumeric characters are covered inside that boundary. Template matching is one of the OCR technique. Each characters from the number plate is compared with the alphanumeric database. Compare each sub image until corresponding exact matching is found. Display the vehicle number on the screen. If ultrasonic transducer finds an obstacle, measures the distance and trigger the USB camera to take a picture of the vehicle, image of the vehicle along with the number plate is saved. The capture imaged were viewed on a web page as alert signal. GPS module is used to find the location of the following vehicle.
Conclusion
A real time vehicle number plate detection and recognition is implemented using CAFFE (Convolutional Architecture for Fast Feature Embedding) in a deep learning framework. Due to powerful learning ability and advantages it deals with convolution, contours approximation method and canny edge detection methods. Contours are defined as the line joining all the points along the boundary of an image that are having the same intensity. Vehicle is detected and extracted using Contours Approximation Method. Alpanumeric in a Number plate of the Vehicle is recognized using Optical Character Recognition (OCR). Pytesseract or Python-tesseract is an optical character recognition tool in Python. It is used to detect embedded characters in an image. It will read and recognize the text in images, license plates, etc. Then Pass the Image through the OCR system. Ultrasonic transducer measure the distance between the vehicles. The vehicle image is saved and sends the information to the Central Station through Message (Mail).
References
[1] Ju-Seok Shin, Ung-Tae Kim, Deok-Kwon Lee, Sang Jun Park, “Real-Time Vehicle Detection using Deep Learning Scheme on Embedded System”, 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN). [2] Luka Cosic, Mario Vranjes, “Time to collision estimation for vehicles coming from behind using in-vehicle camera”, 2019 Zooming Innovation in Consumer Technologies Conference (ZINC) IEEE. [3] Zhang Yankun, Hong Chuyang, Weyrich, Norman, “A Single Camera Based Rear Obstacle Detection System”, July 5th 2011 IEEE Intelligent Vehicles Symposium (IV) IEEE. [4] K B Sathya, V Vaidehi, G Kavitha, “Vehicle License Plate Recognition (VLPR)”, 2017 Trends in Industrial Measurement and Automation (TIMA) [5] Prashanth Patil , C Kanagasabapathi , Siva S Yellampalli, “Automatic Number Plate Recognition System for Vehicle Identification”, 2017 International Conference on Electrical, Electronics, Communication, Computer and Optimization Techniques (ICEECCOT) . [6] Aiswarya Menon, Bini Omman, “Detection And Recognition of Multiple License Plate From Still Images”, 2018 International Conference on Circuits and Systems in Digital Enterprise Technology (ICCSDET). [7] Olamilekan Shobayo , Ayobami Olajube, Nathan Ohere, Modupe Odusami, and Obinna Okoyeigbo, “Development of Smart Plate Number Recognition System for Fast Cars with Web Application”, 7 February 2020 Computational Intelligence and Soft Computing Volume 2020, Article ID 8535861, https://doi.org/10.1155/2020/8535861. [8] Olamilekan Shobayo , Ayobami Olajube, Nathan Ohere, Modupe Odusami, and Obinna Okoyeigbo, “Development of Smart Plate Number Recognition System for Fast Cars with Web Application”, 7 February 2020 Computational Intelligence and Soft Computing Volume 2020, Article ID 8535861, https://doi.org/10.1155/2020/8535861 [9] Jaskirat Singh, Bharat Bhushan, “Real Time Indian License Plate Detection using Deep Neural Networks and Optical Character Recognition using LSTM Tesseract”, 2019 International Conference on Computing, Communication, and Intelligent Systems(ICCCIS). [10] Mahesh Babu K, M V Raghunadh, “Vehicle Number Plate Detection and Recognition using Bounding Box Method”, 2016 International Conference on Advanced Communication Control and Computing Technologies (ICACCCT) ISBN No.978-1-4673-9545-8
Copyright
Copyright © 2022 Chandana M G . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET45606
Publish Date : 2022-07-13
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online