

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Development of SPM for Nut Sorting
Authors: Rutuja Warungase, Shreya Shinde, Dhanashree Thorat, Dhanishtha Patole, Prof. Pankaj Beldar
DOI Link: https://doi.org/10.22214/ijraset.2022.42813
Certificate: View Certificate
Abstract
In the complex industrial environment, there are many interference objects when detecting the objects on the production line. The interference objects are very similar to the objects to be sorted in terms of colour, shape, and size. The existing detection methods like edge detection and object segmentation make it difficult to recognize the objects in the complex industrial environment. Detection of dimensions using load sensor, Infrared sensor, and Arduino program. The machine is controlled by Arduino (microcontroller) with a Servo motor. The aim of this project is the separate hexagonal nuts according to their dimension. These systems can be used in several applications aimed to automatize the process of sorting. With the help of this machine, work efficiency can be increased and labour can be decreased. The project\'s purpose is to create a Mechatronics system that can sort nuts. It would also be able to detect and reject other items in the process. The project\'s goal will be to supply the industry with a piece of working equipment for direct use in the Quality Control department at a minimal cost.
Introduction
I. INTRODUCTION
The main intention of the project is to design a mechanism for the sorting of hexagonal nuts with the help of automation as well as, reducing the manual work of sorting. Generally, the process of sorting is done with the help of a robotic arm or is done manually. But here, we are designing a mechanism of sorting without the help of a robotic arm but by using sensors and microcontrollers. The sensors used are the Load sensor, Infrared sensor, and microcontroller Arduino. The other components used are the servo motor, gear motor, a guide, a round plate, a base plate, rods, or bars. All the components are connected in a circuit for the smooth working of the machine. The sorting is done automatically with the assistance of a program. The mechanism requires a program. The sorting of different sizes of nuts and defective nuts is done with this mechanism. The sorting is done as the sensor recognizes the nut, and then puts the nut in designated boxes. The defective nuts are as well placed in the designated box. Thus, the sorting is done in this manner and the process of sorting is completed respectively. Hence, reducing labour, increasing efficiency and as well reducing production costs. The components of this nut sorter will be sensors, servo motor, and some basic electronic components. Moving on to fastener packaging and handling, the fastener business produces a wide range of tasks that change in size, with all other factors staying constant. In this situation, the requirement for low-cost, reliable equipment becomes critical.
II. METHODOLOGY
Automation is assessed by all the industries in the mechanical industry from the standpoint of competition. Additionally, it is very important from the viewpoint of reducing human effort and improving material handling system automation has become a very important objective. To integrate automation into the current urban manufacturing system, several appropriate measures need to be taken, not just in machining and packing, but also in material handling. In the initial stage, the understanding of the problem was done according to the problem definition. The problem was defined based on references from research papers and understanding of the sorting concept, and to automate the same, the problem statement was finalized. Research related to the literature reviews was done, and then the required decisions about the components and design specifications were taken. By analysis of the problem statement, the general objectives of the project were defined, which are:
- To identify the key policy avenues that may be appropriate to meet future challenges in the Quality Control industries.
- To provide alternatives that reduce human effort and improve material handling systems by implementing automation.
- Automation solutions that are practical and sustainable for the future.
- Analyse a prototype to determine its feasibility for long-term applications.
III. HARDWARE REQUIREMENT
- Infrared Sensor: Infrared distance sensors are mostly used for accurate distance measurements. Interfacing with most microcontrollers is straightforward: the only analogue output is often connected to a digitizer for taking distance measurements, or the output will be connected to a comparator for threshold detection. The detection range of this version is approximately 10 cm to 80 cm (4″ to 32″). The GP2Y0A21 uses a 3-pin JST PH connector that works with our 3-pin JST PH cables for infrared sensors. These cables have 3-pin JST connectors on one end and are available with pre-crimped male pins, pre-crimped female pins, and with unterminated wires on the opposite end. it's also possible to solder three wires to the sensor where the connector pins are mounted.
- Load cell (or loadcell): A load cell may be a transducer that converts force into measurable electrical output. Although there are many types of force sensors, gauge load cells are the foremost commonly used type. aside from certain laboratories where precision mechanical balances are still used, gauge load cells dominate the weighing industry. Pneumatic load cells are sometimes used where intrinsic safety and hygiene are desired, and hydraulic load cells are considered in remote locations, as they are doing not require an influence supply. gauge load cells offer accuracies from within 0.03% to 0.25% full scale and are suitable for pretty much all industrial applications.
- Microcontroller: The Arduino Uno may be a microcontroller board supported thru the manner of the method of the ATmega328 (datasheet). it's far 14 digital input/output pins (of which may be as PWM outputs), 6 analog inputs, a 16 MHz ceramic resonator, a USB connection, an electricity jack, an ICSP header, and a push. It includes the entirety needed to help the microcontroller; be part of it to a pc with a USB cable or strength it with an AC-to-DC adapter or battery to bring about start. The Uno differs from all previous forums therein it would not use the FTDI USB-to-serial motive force chip. Instead, it functions the Atmega16U2 (Atmega8U2 as much as model R2) programmed as a USB-to-serial converter. Revision 2 of the Uno board functions as a resistor pulling the 8U2 HWB line to the bottom, making it less complicated to area into DFU mode.
- Gear Motor: A gear motor is an all-in-one aggregate of a motor and gearbox. The addition of a tool head to a motor reduces the rate at the same time as growing the torque output. The maximum vital parameters with regard to tools automobiles are speed (rpm), torque (lb-in), and efficiency (%).
IV. DESIGN AND MODELING
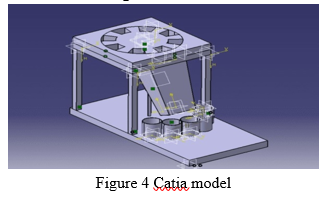
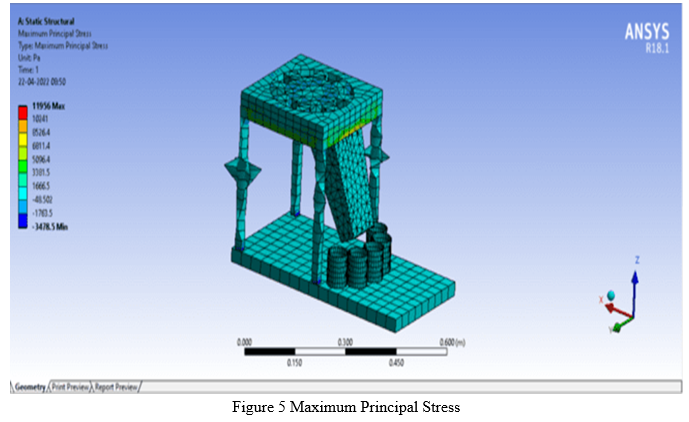
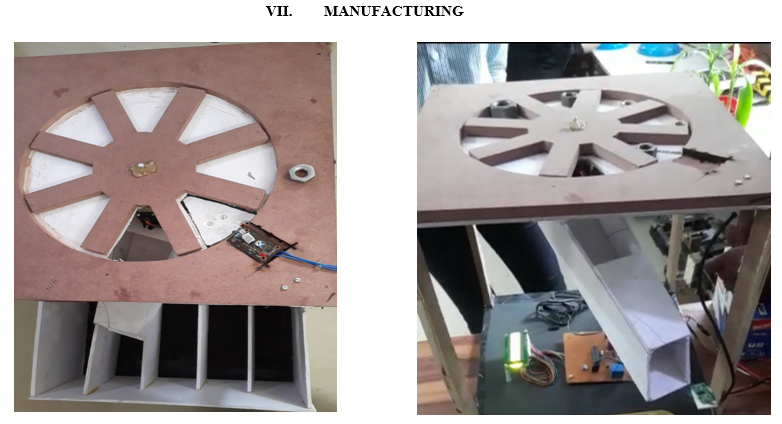
A. Mechanical Parts
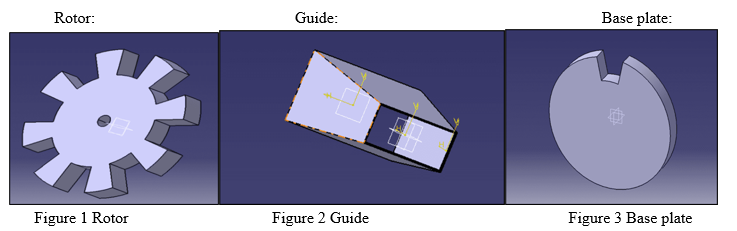
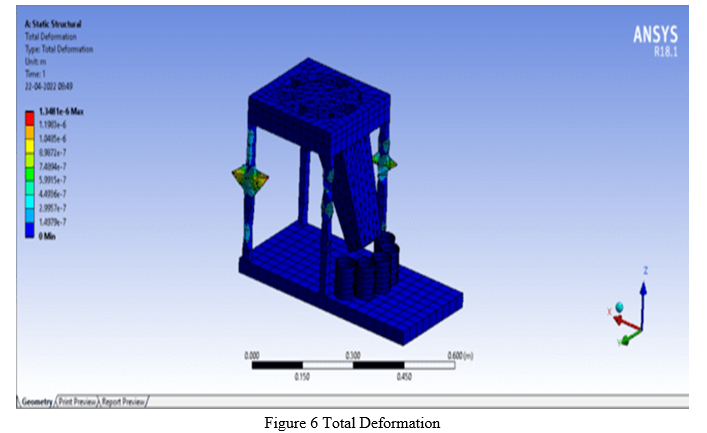
B. Modelling
The Catia V5 software is used to create the Mechanical design.
V. analysis
Analysis of a design used to be done by hand calculations and many of the tests have been replaced by computer simulations using computer-aided engineering (CAE) software.
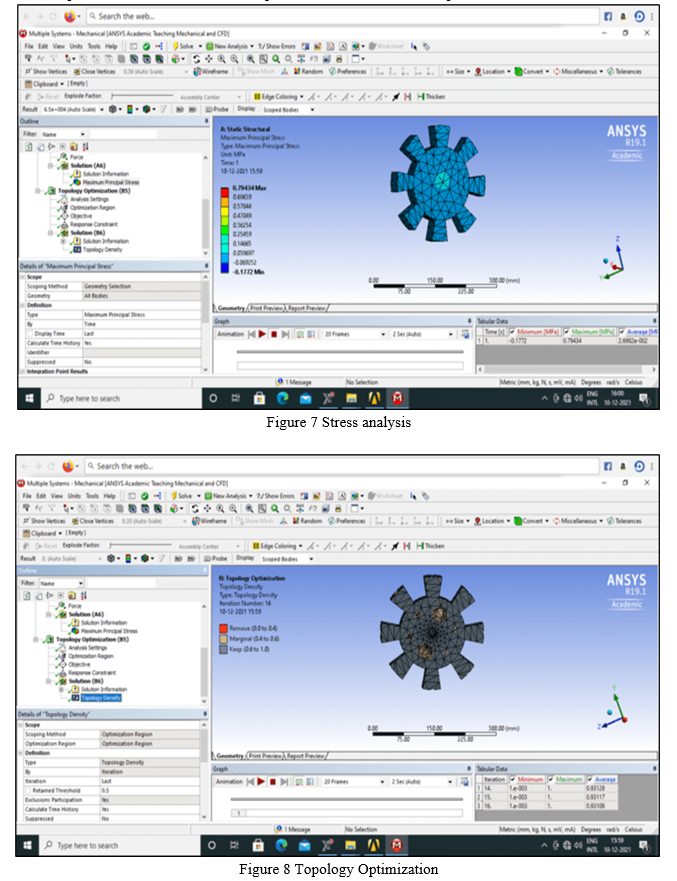
A. Maximum Principal Stress
For Max. Principal stress, 9.81 N force is given, results are obtained is, maximum principle stress = 11956 Pa
B. Total Deformation
For total deformation, 9.81N force is given, results are obtained is, maximum stress = 1.3481e-006 Pa
VI. TOPOLOGY OPTIMIZATION
Topology optimization is a method of optimizing material layout and structure inside a given 3D geometrical design space according to a set of user-defined rules. The purpose is to mathematically model and optimize for external influences, boundary conditions, and restrictions to maximize the system's performance.
Firstly, we selected a semi-circular rotor, and then we selected a trapezoidal slot rotor. We have shown the topology optimization for the same. Hence, it is proved that our selected rotor is proven to be the best as is it optimized.
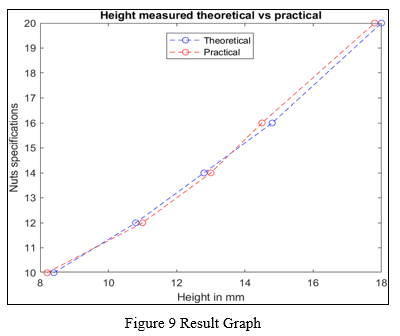
VIII. RESULTS
The nuts of size (M10, M12, M14, M16, M20) are considered and tested accordingly. As seen in the graph, the results obtained after testing the above-mentioned nuts, were similar to the expected results. The theoretical values are close to the expected values.
Hence it can be said that the testing was successful and the sorting procedure is close to accurate. The model is also working as expected.
 ???????
???????
Conclusion
The machine may be very helpful within the sector of fasteners packaging and handling. With the use of this gadget large kinds of jobs produced through fasteners enterprise which isn\'t only distinct in physical or chemical properties, but, have the small version in length with all different parameters remaining same, the sorting of nuts will become cost-effective, reliable, time-saving and reduce human effort. The machine has been proposed for the actual implementation of Inductive Proximity Sensors and Ultrasonic sensors in the industry.
References
[1] Shaikh, Rizwan, and Mustafa M. Tulve. \"Automatic job sorting machine.\" (2021). [2] Olakunle, ALADEUSI Olugbenga. \"DESIGN AND DEVELOPMENT OF A COLOUR SENSING BASED OBJECT SORTING ROBOTIC ARM.\" (2017). [3] Bhanuprakash, K., et al. \"An exploratory study on high-speed material sorting robot using the proximity sensor.\" AIP Conference Proceedings. Vol. 2161. No. 1. AIP Publishing LLC, 2019. [4] Isiramen, Oseikhuemen E. Design, and implementation of an automatic conveyor sorting system. Diss. Murdoch University, 2018. [5] Kutila, Matti, Jouko Viitanen, and Antero Vattulainen. \"Scrap metal sorting with color vision and inductive sensor array.\" International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce (CIMCA-IAWTIC\'06). Vol. 2. IEEE, 2005. [6] Tsung, Tsing Tshih, and Nguyen Hoai. \"Dynamic performance measurement of proximity sensors for a mobile robot.\" Key Engineering Materials. Vol. 625. Trans Tech Publications Ltd, 2015. [7] Aji Joy, \"Object sorting robot arm based on color sensing\", Volume (3) IJAREEIE (2014) [8] Dr. S.N. Bhadoria, \"Nut-bolt sorting using image processing by the robotic arm\", International Engineering Research Journal., Volume (3), (2019)
Copyright
Copyright © 2022 Rutuja Warungase, Shreya Shinde, Dhanashree Thorat, Dhanishtha Patole, Prof. Pankaj Beldar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET42813
Publish Date : 2022-05-17
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online