

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Development of Surveillance Drone
Authors: Ayush Kawale, Akshay Biswas, Dr. Pankaj Gajbhiye, Vijayanand Dhundale, Ritik Meshram, Smita Patwekar, Vaishnavi Sawargaonkar, Trishul Kamdi
DOI Link: https://doi.org/10.22214/ijraset.2022.41748
Certificate: View Certificate
Abstract
In recent years, as interest in Unmanned Aerial Vehicles (UAVs) has increased, the development in the unmanned has an important technology for military and security application. Various missions can be done using this system as it will help in the surveillance in unknown areas, forestry conservation, spying enemy territory. Application which is developed in this research has a purpose to simulate condition in war zone for spying the enemy. Following current trends towards UAV innovative design a small size light UAV quad copter system was design, assembled and tested in flight. The aim is to design a low cost structure and make it comparable with other more expensive.
Introduction
I. INTRODUCTION
Drone industry is one of the future industries that have potential for limitless application in the future. our group plans on utilizing UAV (unmanned aerial vehicle) technology in a positive way, As UAV is an aircraft that can manoeuvre without a human pilot on board. There has been tremendous progress on development of UAV for military operation which is operated in urban terrain. The aim of this research is to developed simulation of intelligent UAV for military surveillance.
Unmanned aerial vehicle (UAV) also known as drone, are expected to provide diverse military, civilians, commercial and governmental services. Along with this expectations, the development of various protocols based communication devices and flight control providing sophisticated navigation that can be mounted on the UAVs is this Expectations and the development of devices, many UAS operators and developers demanding a system that allows different type of UAVs to control and manage in the same services simultaneously .creating an environment where unmanned aircraft system operators can receive more sensitive services.
II. PROPOSED DESIGN WORK
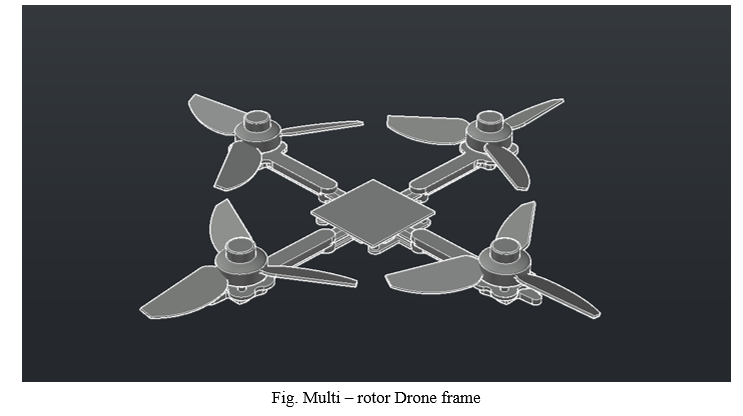
A light weighted designer frame made of carbon fibre and synthetic components is very strong and enables excellent flight handling characteristics it is possible to use it indoor or outdoor, but for safety it is better use it in outdoor environment. It is equipped with the four power full brushlessmotor with four propellers, ( two left turning and two right turning). To operate the UAV, a simple six channel remote control, a three cell lithium polymer (Lipo) flight battery of 12V with approx. 5000 mAh. Figure shows the design of multirotor frame.
III. LITERATURE REVIEW
In order to perform this project, literature review has been made from various sources Like Journal, books, article and others. This chapter includes all important studies which have been done previously by other research work. It is important to do the literature review before doing the project because we can implement if there are information that related to this project.
- Amarjot Singh “Eye in the sky : Real- time Drone Surveillance (DSS) for Violent Individuals Identification using Scatter Net Hybrid Deep Learning Network ”
a. The paper proposed the real-time Drone Surveillance System (DSS) framework that can detect one or more individuals engaged in Violent activities from aerial images.
2. K.VV.M ani Sai Kumar, M d Sohail and Dr. Usha Rani “Crowd Monitoring and Payload Delivery Drone using Quadcopter based UAV System” (2)
a. Quadcopter is designed in this project was used to carry the payload of 250g m cover from one place to another with 6min flight was tested.
b. By mounting high resolution wireless camera, and used for monitoring the crowd in the campus. It can be used for surveillance applications.
3. Velan Y,Musica “Cost Effective Design and Development of Manned Drone”
a. Unmanned Aerial Vehicles, referred to as drones are aerial platforms that fly without a human pilot onboard. UAV’s are controlled autonomously by a computer in the vehicle or under the remote control of a pilot stationed at a fixed ground location
4. Pooja Srivastava, Tejaswi Ninawe, Chitral Puthran, Vaishali Nirgude “Quadcopter for Rescue Missions and Surveillance”
a. For developing a small and compact sized quadcopter which can be used to carry out rescue operations and provide audio/video aid to the people in distress.
b. It saves human pilots from flying in dangerous conditions that can be encountered not only in military applications but also in other scenarios involving operation in bad weather conditions, or near to buildings, trees, civil infrastructures and other obstacles.
5. Mr. Kalpesh N. Shah, Mr. Bala j. Dutt, Hardik Modh “Quadrotor – An Unmanned Aerial Vehicle”
a. To study the complete designing process of quadrotor from the engineering perspective and to fabricate working model of UAV-Quadrotor with improvement in its weight carrying capacity.
6. Rajeshwari Pillai Rajagopala “Drone: Guidelines, Regulations and policy gaps in India” (ISBN journal)
a. This paper examines drone operations in India and analyses the major policy gaps in the country’s evolving policy framework. It argues that ad-hoc measures taken by state and central agencies have been ineffective, whether in addressing issues of quality control, or response mechanisms in the event of an incident, questions of privacy and trespass, air traffic, terrorist threat management, and legal liability.
7. Gordon Ononiwu, Arinze Okoye, James Onojo, Nnaemeka Onuekwusi “Design and Implementation of a Real Time Wireless Quadcopter for Rescue Operations” (AJER, vol-5)
a. This paper proposes the real time security surveillance system using IoT. The system design uses Motion Detection algorithm written in Python as a default programming environment. This significantly decreases the storage usage and save investment cost.
IV. OBJECTIVES
- Our main objective is utilizing UAV (unmanned aerial vehicle) technology in positive way. On a quad copter, the motors and propellers work in pairs with 2 motors / propellers rotating clockwise (CW Propellers) and 2 motors rotating Counter Clockwise (CCW Propellers).
- To realize the two target application with the proper force and torque considerations the weights estimations are carried out to be 200gm.
- The maximum flying time without any load is upto 15minutes.
- The range of our drone is upto 8killometer.
V. PROBLEM IDENTIFICATION
There are several problems face in while carrying out rescue operations. It is costly to carry out a rescue operation as it requires many resources and expenditure. A large number of skilled manpower is required for operating rescue missions. Topographical aspects may vary from place to place thus putting additional human effects. Unfavorable conditions such as bad weather, land sliding, earth quakes could pose as a threat while trying to save people. Our military also have been fixed wing drones that fly at very high altitudes, but there is an absence of advanced reconnaissance system that would greatly help them during tactical missions.
Conclusion
The goal of this project was to produce a nano unmanned aerial vehicle video surveillance platform. Improvements could be made to all aspects of this project, the mechanics, the electronics, and the software, with fewer and smaller electronic circuits the airframe can also be reduced in size and weight. This would increase the overall flight time of the drone
References
[1] Amorjotsingh “eye in the sky: real time drone surveillance (DSS) for violent individual identification using scatter net hybrid deep learning network”(10/11/2018,pg no. 1710) [2] K.VV.M anisaikumar, M d Sohail and DR. Usha rani “ crowd monitoring and payload delivery drone using quadcopter based UAV system” (ICSSIT journal, pg no. 1522) [3] PoojaShrivastav, TejaswiniNinawe, ChitralPuthran, VaishaliNirgude “ Quadcopter for rescue mission and surveillance” (IOSR journal, p-ISSN: 2278-8727, PP48-52) [4] Velan Y, Musica “ Cost effective design and development of manned drone” (ICRAAE journal, pg no. 1126) [5] Mr. Kalpesh N. Shah, MrBala J. Dutt, HardikModh “ Quadcopter- An unmanned aerial vehicle” (2014 IGEDR, vol-2, issue-1) [6] SaifEldinEid and Sharul Sham Dol “ Design and Development of light weight high endurance unmanned aerial vehicle for offshore search and rescue” [7] Rajeshwari Pillai Rajagopala “Drone: Guidelines, Regulations and policy gaps in India” (ISBN journal)
Copyright
Copyright © 2022 Ayush Kawale, Akshay Biswas, Dr. Pankaj Gajbhiye, Vijayanand Dhundale, Ritik Meshram, Smita Patwekar, Vaishnavi Sawargaonkar, Trishul Kamdi. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41748
Publish Date : 2022-04-23
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online