

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Fabrication of a Multipurpose Agriculture Robot
Authors: Kaushik Deo, Prasad Joshi, Rohit Brahmanakar
DOI Link: https://doi.org/10.22214/ijraset.2022.43276
Certificate: View Certificate
Abstract
Agriculture is one of the biggest industries in India having more than 70% population involved in it. Being such an important industry, the technology used by the farmers is still very manual. The world is making advancements in agricultural robotics every day. Automation in this field is something that can improve the efficiency in managing the farms and also improving the productivity of the farmers. In the rising age of automation, not taking benefit of it is useless. Hence, we have created a solution for farmers which is long lasting as well as easy to use. This article showcases a robot which is capable of performing the critical farming operations like sowing, weeding and pesticide spraying. The robot is completely wireless and operates on simple joysticks making it easy for farmers to use effectively. Our goal is to reduce the manual labour of working in the farm and simultaneously reducing the wages required for farming activities. We hope that our robot will be a solution to the farmer’s problems and be a step forward in the advancement of agricultural robotics.
Introduction
I. INTRODUCTION
Agriculture is the primary source of livelihood in many countries in the world, including India. Agriculture accounts for 18 % of India’s gross domestic product. The increase in population requires the increase in agricultural activities to meet the food demand whereas the per capita land availability is reducing. The conventional methods of farming, higher input costs, labor shortage, lack of water resources and problems in crop monitoring make agriculture uneconomical and inefficient, leading to decline in crop production. Automation in agriculture has emerged as a promising methodology for increasing the crop productivity without sacrificing the product quality by saving time and labor using specified tools and technologies (Bonadies and Gadsden, 2019). Its efficiency, usability and accuracy will help to improve the productivity of agricultural machinery by reducing the human activities. The present advancements in programming and technology have made robotics easy and easily accessible. In addition to the easiness of this, the cost factor should also be considered such that it is affordable to the everyday farmer. Hence a robotic platform, capable of providing all the advantages of Agro-bots at reduced cost could boost the pace of advancement of Indian agriculture.
A. Objectives
To create an agricultural Robot of performing various agricultural activities.
To help farmers reduce physical efforts in labour intensive activities.
To reduce farmers dependency on manual labour.
To reduce rental and labour costs of farmers.
To reduce health hazards associated with pesticide supplements.
II. CROP SELECTION
A. Choice of Crop
Cotton is one of the most important fiber and cash crop of India and plays an important role in the economy of the country. It provides the basic raw material (cotton fibre) to cotton textile industry. The four main cultivated species of cotton are viz. Gossypium arboreum, G.herbaceum, G.hirsutum and Barbadense.
B. Cotton Farming in India
Sowing - Cotton is sown using tractor or using bullock pulled seed drill. Hand dibbling of seeds at required spacing is commonly adopted in rain fed areas especially for hybrids.
Weeding - Weeds compete with cotton crop for nutrients, light and moisture. Cotton is susceptible to weed competition from sowing to about 70 days when the canopy covers the inter-spaces. Cotton yields are reduced by 50 to 85% if weed growth is unchecked. Inter-cultivation is done fairly regularly by either a blade harrow with a three tined hoe or a desi plough.
In the crop sown by broadcasting, one or two hand hoeing’s are given to remove weeds, inter-cultivation not only checks the growth of weeds but also leads to better soil aeration and soil moisture conservation
Spraying - Commonly used pesticides includes insecticides, fungicides and herbicides for management of uncontrolled weeds and pests on agricultural sites. However, in total pesticide consumption, insecticides occupy highest share in India. Spraying of Naphthalene Acetic Acid (NAA) is considered. Spray 40 ppm Naphthalene Acetic Acid after 60 and 90 days after sowing of the crop to prevent early shedding and to increase the yield.
III. CURRENT TECHNOLOGIES
According to a research report "Agricultural Robots Market by Type (Milking Robots, UAVs/Drones, Automated Harvesting Systems, Driverless Tractors), Farm Produce, Farming Environment (Indoor, Outdoor), Application, and Geography - Global Forecast to 2026" published by MarketsandMarkets, the global agricultural robots market size is expected to grow from USD 4.9 billion in 2021 to USD 11.9 billion by 2026.
???????A. Sowing Robots
The latest generation of the Fendt Xaver comes with an embedded solution developed by the AGCO Group, a seed unit from Precision Planting. The vSet® solution quickly spaces the seed with utmost precision. With the help of an electrically driven control system, individual grains are deposited with centimeter-accuracy at a pre-defined distance in the row. The grains are dropped in the furrow by a flexible firmer.
???????B. Weeding Robots
The EcoRobotics Smart Weeding Robot works without being controlled by a human operator. It covers the ground just by getting its bearings and positioning itself with the help of its camera, GPS RTK and sensors. Its system of vision enables it to follow crop rows, and to detect the presence and position of weeds in and between the rows. Two robotic arms then apply a micro dose of herbicide, systematically targeting the weeds that have been detected. Reliance on solar power makes the robot completely autonomous in terms of energy, even when the weather is overcast.
???????C. Pesticide Spraying Robots
Innok Heros is a modular indoor and outdoor all-terrain robot platform viable with 3 or 4 wheels. Due to its modular construction, it can be easily modified to suit your needs. Innok Robotics offers integration of various sensors and actors onto the robot. Innok Heros is easy to operate and can be used for many different applications, e. g. in agriculture, logistics, industry research. The robot is very rugged, strong enough to pull a car and can carry payloads over 200 kg.
IV. DESIGN SOLUTION
A. Seeding Mechanism
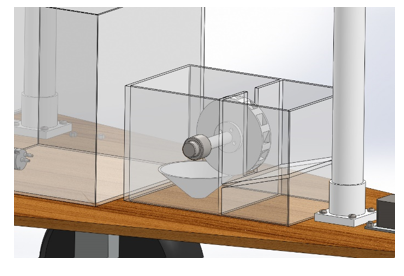
The cotton seeds are generally 5-10mm in size. The mechanism consists of a seed disc which is driven by a motor. The seed disc has slots which are only slightly bigger than the seeds. The seeds fit in those slots and then the disc is rotated which lets the seeds fall through the funnel and onto the ground.
???????B. Spraying Mechanism
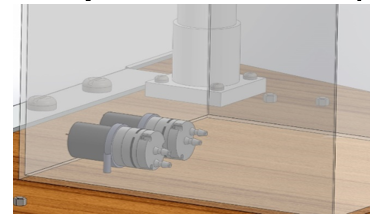
We have attached two Diaphragm pumps which are located inside the pesticide tank and will switch themselves on and off during each cycle of pesticide spraying.
Spraying of Naphthalene Acetic Acid (NAA) is done 60 and 90 days after sowing on the crop to prevent early shedding of buds and squares and to increase the yield.
Apply Pendimethalin 3.3 l/ha three days after sowing. This will ensure weed free condition up to 40 days.
???????C. Weeding Mechanism
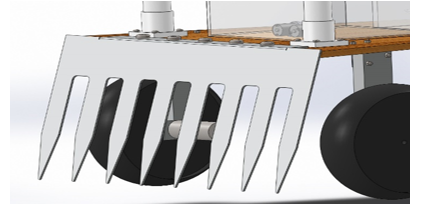
For weeding we have developed a comb like structure that goes 4cm to 5cm deep to unearth all the weeds.
???????D. Material Selection
To keep down the cost of the prototype, we decided to make the chassis mainly out of wood and PVC pipes. The materials are strong enough to withstand the load of the operations and also cheap to manufacture.
For the seed sowing operation, the seeding disc will be 3D printed as it is a complex piece to manufacture using traditional methods. The material used for 3D printing is PLA as it is cheap and provides enough strength for the robot. The box will be made of acrylic as it is not required to go under any form of working pressure.
For the weeding operation, we decided to go with Aluminium sheet as it is going to undergo the load when under operation. According to our market survey we found out that mostly weeding tools are made of Steel or Aluminium, we decided to go with Aluminium as it is cheap and strong enough for the operation.
For the spraying operation, according to market survey, the tanks are made of plastic, so we decided to opt for acrylic sheet for the storage tank. The pumps used for spraying are generally low power DC pumps or Diaphragm pumps. We also decided to use Diaphragm pumps as they are powerful enough to spray the required pesticides. For driving the robot, we decided to go with Rubberized wheels with strong tread patterns as they provide the maximum grip in the farms. We have done analysis of the components exposed to the maximum stresses and ensured that there are no failure points.
V. COMPONENT ANALYSIS
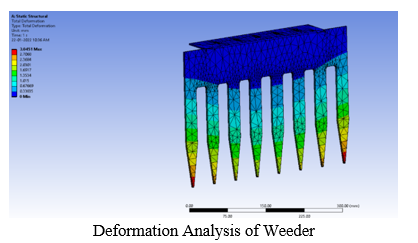
We carried out the total deformation and equivalent von mises stress analysis on the weeding mechanism. The maximum deformation seen on the weeding mechanism is 3.04mm and the maximum equivalent VonMises stresses seen on the weeding mechanism are 65.894 MPa.
As we can see from the figure that the maximum deformation is at the tip of the fork of the weeding mechanism and there is no deformation above the forks of the weeding mechanism. Similarly for the equivalent Von Mises stresses we can see that the maximum stresses are developed at the holes of the attached and also stresses are developed in forks of the mechanism.
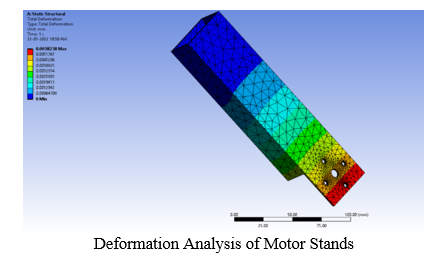
We carried out the total deformation and equivalent von mises stress analysis on the motor stands. The maximum deformation seen on the stands is 0.00582 mm and the maximum equivalent Von Mises stresses seen on the stands are 3.468 MPa.
As we can see from the figure that the maximum deformation is at the tip of the motor stand and there is no deformation at the other end of the motor stand. Similarly for the equivalent Von Mises stresses we can see that the maximum stresses are developed at the holes of the stand.
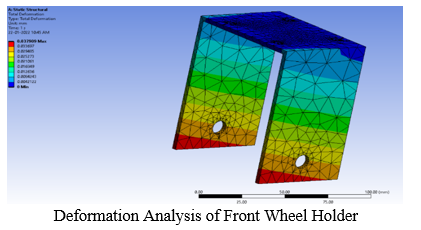
We carried out the total deformation and equivalent von mises stress analysis on the Front Wheel Holder. The maximum deformation seen on the Front Wheel Holder is 0.037 mm and the maximum equivalent Von Mises stresses seen on the Front Wheel Holder are 41.396 MPa. As we can see from the figure that the maximum deformation is at the tip of the Front Wheel Holder and there is no deformation at the other end of the Front Wheel Holder. Similarly for the equivalent Von Mises stresses we can see that the maximum stresses are developed at the holes of the Front Wheel Holder.
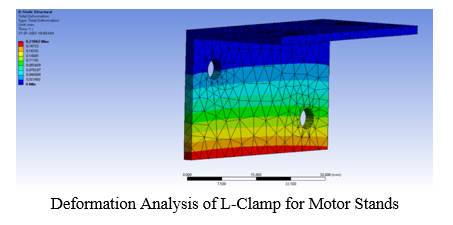
We carried out the total deformation and equivalent von mises stress analysis on the L-Clamp of Motor Stands. The maximum deformation seen on the L-Clamp is 0.296 mm and the maximum equivalent Von Mises stresses seen on the L-Clamp are 18.4 MPa.
As we can see from the figure that the maximum deformation is at the tip of the L-Clamp and there is no deformation at the other end of the L-Clamp. Similarly for the equivalent Von Mises stresses we can see that the maximum stresses are developed at the holes of the L-Clamp.
VI. CALCULATIONS AND SPECIFICATIONS
A. Motor Calculations
- Total tractive force was considered as the sum of forces due to rolling resistance and gradient force.
- Force due to acceleration and aerodynamic drag was negligible. Torque required depends upon the gross weight of the robot, velocity of travel, wheel diameter and soil properties.
- The equations for calculating the required torque on each motor are given below.
Ft = µmgcosA + m.a + m.g.sinA
- µ of Soil = 0.3
- Mass of Bot (with Pesticide weight) = 16 Kg
- g = 9.81 m/s2
- Max Acceleration = 1 m/ s2
- Angle of Incline = 0 Degrees
Hence,
Ft = 0.3 x 16 x 9.81cos0 + 16 x 1 + 16 x 9.81sin0
= 47.008 + 16
= 63.008 N
Hence, Torque required = Ft x Radius of Wheel
= 63.008 x 40
= 2520.32 N-mm
Hence, Torque required for each driving motor = 2520.32/2
Motor Torque = 1260.16 N-mm
Hence Motor Torque Rating = 12.85 Kg-cm
Considering Factor of Safety of 1.5 = 20 Kg-cm
???????B. Technical Specifications
- Dimensions - Final Robot - 2.5 x 3 Feet, Prototype Robot - 1.5 x 2 Feet
- Weight - Final Robot - 7.5 kg (Dry Weight), Prototype Robot – 5.5 kg (Dry Weight)
- Drive Motor Specifications - 20 kg-cm Torque 12V DC Geared Motor
- Spraying Operation - 12V DC Diaphragm Pumps
- Pesticide Tank Capacity - 15 litres
- Material - Wood, PVC and Aluminium
???????C. Control System
The robot is controlled using Arduino Uno and Arduino Nano. We have used the HC-12 Transceiver module as it has a range of almost 1.5 Km which is very useful on farms. Also, this robot is supposed to be wireless so the range is very useful. The main components are listed below -
- Arduino Uno
- Arduino Nano
- L298N Motor Driver
- Joystick Module
- HC-12 Transceiver Module
- Battery – 5.2 Ah
VII. MANUFACTURING
A. Chassis Manufacturing and Assembling
The Chassis manufacturing was carried out using wood, PVC pipes and PVC pipe holders as its components. At first the wood was cut into 2 pieces i.e. the upper part and the lower part of the chassis. The wood was then shaped according to our specifications. Holes were drilled according to our design for mounting of the PVC pipe holders, diaphragm pump, wheel assembly, weeding mechanism, sowing and spraying mechanism. After drilling of the holes on both wooden planks the PVC pipe holders were attached to both the upper and lower part of the chassis. Then the PVC pipes were fixed in between the two planks and the chassis was ready.
???????B. Wheel Assembly
The components of the wheel assembly include the wheels, motor stands, L clamps for motor stands and front wheel holder. At first for the manufacturing of rear wheel assembly the manufacturing of the L clamps and motor stands was done. The L clamps and the motor stands were cut according to our specifications and holes were made on the L clamps and the motor stands to house the motor and to fix the stands on the wooden chassis. The L clamps were first fixed on the wooden chassis using M5 nuts and bolts and then the motor stands were fixed in between the clamps using M5 nuts and bolts. After fixing of the motor stands motor was attached to the motor stand using M3 screws. The manufacturing of the front wheel assembly was done by fabricating a U shaped front wheel casing. Then the wheel along with ball bearing was attached in the U shaped housing by a M10 nut and bolt.

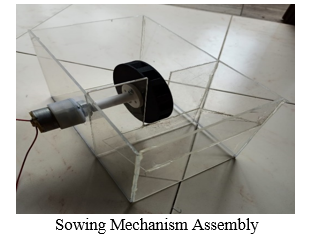
C. ??????????????Sowing Mechanism and Assembly
The sowing mechanism has four main components the seed box, the seed disc, motor and motor seed disc coupling. The seed box is made of acrylic sheet. The acrylic sheets were at first cut according to our design and pasted using Ardelite. Notches and drilled were made for the motor and the seed disc to be attached. After the seed box was ready we attached motor to the seed disc motor coupling. The coupling was then attached to seed disc and the seed disc was free to rotate.
???????D. Spraying Mechanism and Assembly
The spraying mechanism has three main components namely pesticide tank, diaphragm pump and nozzles. At first, we manufactured the pesticide tank using acrylic sheets by assembling them using araldite. The diaphragm pump is mounted on the chassis using four M3 nuts and bolts. The pesticide from the tank is sucked by the diaphragm pump and passed to the nozzles which then spray the pesticide liquid to the crops.

???????E. Weeding Mechanism
The weeding mechanism is comb like structure which runs through the field to unearth the weeds. We manufactured this outside because laser cutting technology was not available in house. The weeding mechanism is attached at back of the robot.

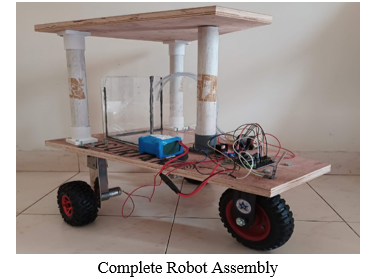
???????F. Whole Robot Assembly
After the manufacturing of the sub-assemblies is complete we now carry out the final assembly of the agriculture robot. At first the wooden chassis is manufactured and the wheel assembly is attached to it. Then after that the sowing and the spraying mechanisms are attached. The electronics connections are now made to the motor and Arduino UNO. Other electronics such as Arduino NANO and the transmitter and receiver are also connected to the Arduino UNO.
 ???????
???????
References
[1] Lal, B SureshAU - Ravindar, MushamAU - Ramana, AdepuPY - Rising Farm Labour Wages in India; Trends, Causes and Impact, - 2015/11/01SP - T1 [2] Athira, P. & Pallath, Shaji & Bovas, Joe Joe & Suresh, Dipak. (2020). Design Concepts for the Development of a Semi-autonomous Robotic Platform for Environment Friendly Agriculture. International Journal of Current Microbiology and Applied Sciences. 9. 2240-2246. 10.20546/ijcmas.2020.911.269. [3] Bonadies, Stephanie & Gadsden, Stephen. (2018). An overview of autonomous crop row navigation strategies for unmanned ground vehicles. Engineering in Agriculture, Environment and Food. 12. 10.1016/j.eaef.2018.09.001. [4] http://www.leafconagro.com/cotton-agro-nomia-practice/ [5] Nayak, P., & Solanki, H. (2021). PESTICIDES AND INDIAN AGRICULTURE- A REVIEW. International Journal of Research -GRANTHAALAYAH, 9(5), 250–263. [6] Celen, Ilker, Onler, Eray, Kiliç, Erdal, A Design of an Autonomous Agricultural Robot to Navigate between Rows, 2015/01/01, 10.2991/eame-15.2015.97 [7] Burra Hymavathi , J Hariharan , K Manideep , D V Srikanth, 2020, Design and Structure of Multi-Purpose Agricultural Robot, INTERNATIONAL JOURNAL OF ENGINEERING RESEARCH & TECHNOLOGY (IJERT) Volume 09, Issue 05 (May 2020), [8] H. Durmu?, E. O. Güne?, M. K?rc? and B. B. Üstünda?, \"The design of general purpose autonomous agricultural mobile-robot: “AGROBOT”,\" 2015 Fourth International Conference on Agro-Geoinformatics (Agro-geoinformatics), 2015, pp. 49-53, doi: 10.1109/Agro-Geoinformatics.2015.7248088. [9] K. Fue, W. Porter, E. Barnes, and G. Rains, “An Extensive Review of Mobile Agricultural Robotics for Field Operations: Focus on Cotton Harvesting,” AgriEngineering, vol. 2, no. 1, pp. 150–174, Mar. 2020, doi: 10.3390/agriengineering2010010. [10] Shamshiri, Redmond & Weltzien, Cornelia & Hameed, Ibrahim & Yule, Ian & Grift, Tony & Balasundram, Siva & Pitonakova, Lenka & Ahmad, Desa & Chowdhary, Girish. (2018). Research and development in agricultural robotics: A perspective of digital farming. International Journal of Agricultural and Biological Engineering. 11. 1-14. 10.25165/j.ijabe.20181104.4278.
Copyright
Copyright © 2022 Kaushik Deo, Prasad Joshi, Rohit Brahmanakar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43276
Publish Date : 2022-05-25
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online