

Ijraset Journal For Research in Applied Science and Engineering Technology
Literature Review on Design and Fabrication of Agriculture Machine by Using “A. I. S.”
Authors: Dr. A. H. Ingle, Mahesh D. Meshram, Manish I. Thakre, Mo. Sahil K. Sheikh, Nayan M. Potdar, Nihal J. Jadhao, Niraj R. Dudhe
DOI Link: https://doi.org/10.22214/ijraset.2022.44632
Certificate: View Certificate
Abstract
Manual spraying of pesticides and herbicides to crops and weed inhibitors onto the field are quite laborious work to humans. Manual trimming of selected unwanted plants or harvested crops from the field is also difficult. Our project proposes a multipurpose solar powered, flexible, Remote Controlled, semi-automated spraying machine with 4 Degrees of Freedom (DoF) in spatial movement, with an additional plant mowing equipment. The machine is designed to spray pesticide/insecticide directly onto individual lesions minimizing wastage or excess chemical spraying, hence making the system cost effective and also environment friendly. It is designed to cut down undesired plants selectively by remotely controlling the start and stop of the mowing system. Alternatively, it also serves the purpose of maintaining lawns and sports field made of grass. The same system can be used for water spraying and mowing the grass to desired levels, leading to proper maintenance of the field.
Introduction
I. INTRODUCTION
India is a grarian economies and most of rural populations depend on agriculture to earn their livelihood. The farming methods at present are manual or semi-automatic with high involvement of labourers. In the recent years, the number of labour availability is reducing continuously along with increase in their wages. There is a requirement of higher productivity. Hence the device is to be designed which helps farmers to overcome the stated problem. Automated Machines can provide us the solution.
The main application of machines in the commercial sector has been concerned with the substitution of manual human labour by machines or mechanized systems to make the work more time efficient, accurate, uniform and less costly. One may argue the social implications of such developments, for example, the effects on employment through loss of blue-collar jobs to the more efficient machinic counterpart; there are also ethical considerations that may be argued. Whilst there may well be some validity to the argument in some cases, this current project is unique in the number of stakeholders that are affected in a positive sense.
The automation is useful at various stages of human life. The beautiful evenly cut grass increases the beauteousness of any hotel, house, park, meeting hall etc. Hence uniform grass cutting is important to maintain the prestige of any house or hotel. The manual grass cutting is possible using human being but it usually consumes time and energy of human being. Also, the manual grass cutting is inefficient and many time results in non-uniform structure of grass. Hence to avoid all these issues it is better to use automated grass cutting robot machine which can be operated through android phone.
II. COMPONENTS
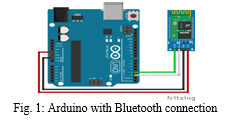
A. Arduino uno with HC 6 Bluetooth
Arduino can communicate with another device via Bluetooth using the module HC-06 (slave). It enables the Arduino to be connected and exchange data with other devices such as Smartphone, computer or other microcontrollers. Bluetooth communication can be used to control a Machine remotely, Display and store data on your computer or on your smartphone, for instance.
B. Battery
An electric battery is a source of electric power consisting of one or more electrochemical cell with external connections for powering electrical devices. When a battery is supplying power, its positive terminal is the cathode and its negative terminal is the anode. The terminal marked negative is the source of electrons that will flow through an external electric circuit to the positive terminal. When a battery is connected to an external electric load, a redox reaction converts high-energy reactants to lower-energy products, and the free energy difference is delivered to the external circuit as electrical energy. Historically the term "battery" specifically referred to a device composed of multiple cells; however, the usage has evolved to include devices composed of a single cell.

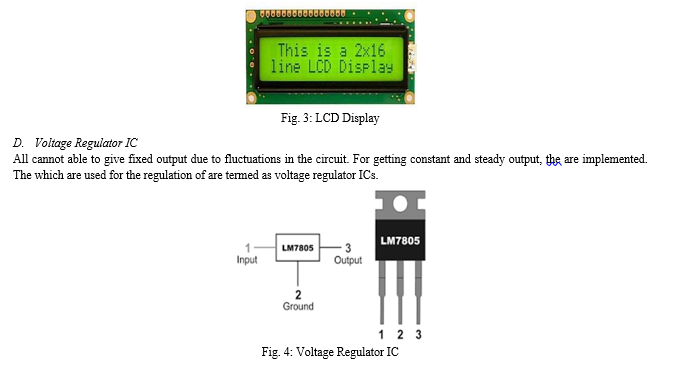
C. LCD Display
This research uses 16 by 2 LCD (Liquid Crystal Display) screen to display the direction of movement of this system. It also shows the ON and OFF status of Grass Cutter. This is a preferable module over seven segment and multi segment LED modules. This is because it is economical and it can show any special and custom character, animations and so on. This module can show 16 characters on each line and it has 2 such lines. Each character is on this LCD module is displayed in 5*7 pixel matrix. This LCD consists of Command Register to store the commands provided to this module. The Data Register in LCD module is used to store the data displayed on LCD display. Figure 2 below shows the 16*2 LCD module.
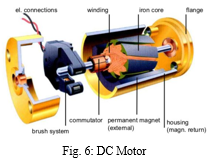
E. Motor Driver
The DC motor in this system is connected with analog output pin of ATmega328P microcontroller. But this microcontroller can produces maximum 5V of DC output voltage. The DC motor connected with this system requires 12V DC input voltage to operate. Hence L293D motor driver IC is connected between microcontroller output pin and DC motor input. This IC acts as a current amplifier.
F. DC Motor
DC motors were the first form of motor widely used, as they could be powered from existing direct-current lighting power distribution systems. A DC motor's speed can be controlled over a wide range, using either a variable supply voltage or by changing the strength of current in its field windings. Small DC motors are used in tools, toys, and appliances. The universal moter can operate on direct current but is a lightweight brushed motor used for portable power tools and appliances.
G. Pump
A pump is a device that moves fluids (liquids or gases), or sometimes slurries, by mechanical action, typically converted from electrical energy into hydraulic energy. Pumps can be classified into three major groups according to the method they use to move the fluid: direct lift, displacement, and gravity pumps. Pump operate by some mechanism (typically reciprocating or rotary), and consume energy to perform mechanical work moving the fluid. Pumps operate via many energy sources, including manual operation, electricity, engines, or wind power, and come in many sizes, from microscopic for use in medical applications, to large industrial pumps
H. Solar Panel
This system uses 12V, 10-Watt solar panel. It has aluminium frame and its surface is made up with tampered glass material. This panel is consists of mono crystalline silicon. This panel is compact, lightweight and economical as compared to other existing panels of similar rating.

I. Nozzle
A spray nozzle is a precision device that facilitates dispersion of liquid into a spray. Nozzles are used for three purposes: to distribute a liquid over an area, to increase liquid surface area, and create impact force on a solid surface. A wide variety of spray nozzle applications use a number of spray characteristics to describe the spray.
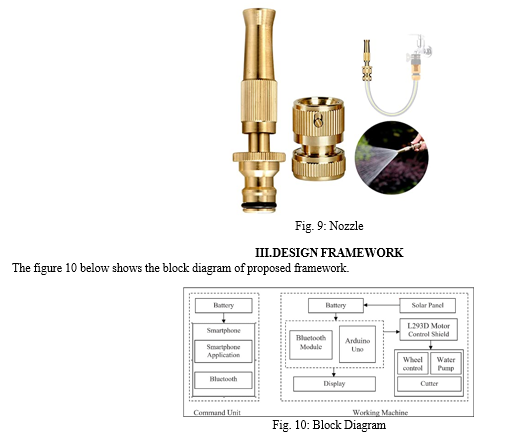
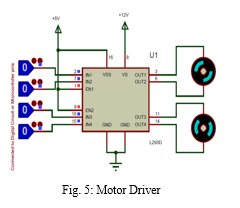
As shown in figure 10 above, initially the 12 V battery supply needed to start. This supply will be converted into 5V DC supply using voltage regulator. This 5V supply will be provided to microcontroller. The Bluetooth module needed to be started and connected to the android smart phone. Once the connection is established between the smart phone and the system, user can move this system in vertical and horizontal direction using android application in smart phone. User will start the grass cutter to cut the grass of desired location. After completing grass cutting task, user will switch OFF the grass cutter using android smart phone. Then the main system can be switched OFF by disconnecting the 12V battery supply to the system.
IV. WORKING
First make sure that the program for the Machine is successfully uploaded into the Arduino board and all the connections between electrical components and the Arduino are given exactly as mentioned. Then install the RC Bluetooth application from the App store of the smartphone. Switch ON the connection between Battery and the Arduino board. On doing this a bright green light will appear on the Arduino board and a slow blinking red light will appear on the Bluetooth module. This means that the Arduino board, Motor shield and the Bluetooth module are now active. Now open the RC Bluetooth car app in the smartphone and open settings. Select the option that says “Connect to car”. Then the Bluetooth module HC-05 will be visible. Click on that to pair the smartphone with the Machine. When the Machine is paired the blinking of the red light on the Bluetooth module will be faster. Before giving any movement to the Machine, adjust the vertical, horizontal actuators and nozzle according to the requirements of the field. For the movement of Machine keys are provided. When the “Forward” key is pressed then all the 4 DC motors rotate in the same direction (assume clockwise) which in turn rotates the wheels and the Machine moves forward. When the “Reverse” key is pressed then all the 4 DC motors rotate in the same direction but this time assume anti-clockwise) which in turn rotates the wheels and the Machine moves reverse. When the “Left” key is pressed then the front and rear DC Motors on the right side of the chassis move faster than the left ones and thus the Machine moves Left. When the “Right” key is pressed then the front and rear DC Motors on the left side of the chassis move faster than the right ones and thus the Machine moves Right. Using the keys mentioned above the Machine is placed at such a position that when the pump is switched ON using the “Pump: ON/OFF” key, the nozzle 45 sprays the pesticide directly onto the affected plants. By using the movement keys the whole field can be covered with pesticides. When the spraying of pesticides is done, the pump is switched OFF using the same key. The Mowing or Harvesting operation can also be performed. Using the movement keys mentioned above the Machine is placed at such a position that when the Mower is switched ON using the “Mower: ON/OFF” key, the unwanted weeds or harvested crops are cut off by the blades of the mower. The clearance of the blade from the ground is adjustable. So, we can control the level of grass field to be maintained if needed. By using the movement keys the crops or weeds in the whole field can be Mowed. When the Mowing operation is done, the Mower is switched OFF using the same key. When all the operations are done, the Machine is called back and the connection between the Battery and the Arduino board is switched OFF and the Machine is preferably placed in an environment with sunlight so that the battery can be recharged.V.
- PROS & APPLICATIONS
A. Pros
- Portable structure with Compact size
- Simple operation
- Less cost
- Uniform grass cutting is possible
- Reduces human efforts
B. Application
This system is mainly made for agricultural use but it can be used to cut the grass of cricket ground, football ground, garden etc.
VI. FUNDING
This research is self-funded. The author of this paper invested the complete amount to create this system.
References
[1] Firas B. Ismail, Nizar F.O. Al-Muhsen, Fazreen A. Fuzi, A. Zukipli, “Design and Development of Smart Solar Grass Cutter”, International Journal of Engineering and Advanced Technology, December 2019 [2] T. Koppel, P. Tint, G. Karajeva, K. Reinhold, and S. Kalle, \"Vibration and noise caused by lawn maintenance machines in association with risk to health,\" Agronomy Research, 01/01 2012. [3] R. V. Sanjana Arunesh, Shreyas Arunesh, Nivetha N., \"Design and Implementation of Automatic Lawn Cutter, 2016 [4] Aybek, A., Kamer, H.A., Arslan, S. 2010. Personal noise exposures of operators of agricultural tractors. Applied Ergonomics. [5] B. P. Dilip, N. B. P. , V. S. U. , S. W. , and P. S. M. , \"Design and Implementation of Automatic Solar Grass Cutter, 2017, [6] F. D. W. Praful P. Ulhe, Manish D. Inwate, Krushnkumar S. Dhakte, \"Modification of Solar Grass Cutting Machine,\" 2016 [7] O. A. Tanimola, Diabana, P. D, Bankole, Y. O., \"Design and Development of a Solar Powered Lawn Mower,\" 2014 [8] H. A. B. Y.M.Gaikwd, Pooja.S.Ighe, Vishakha.S.Birari, \"Solar based Automatic Grass Cutter,\" 2017 [9] Smart Solar Grass Cutter Robot for Grass Trimming\" by Ashish kumar chaudhari, Yuvraj sahu, Pramod kumar sahu, Subhash Chandra verma [10] Arkin, E.M., Fekete, S.P., Mitchell, J.S.B. “The lawnmower problem”, Proceedings of the 5th Canadian Conference on Computational Geometry, 1993 [11] Reid, J.F., Zhang. Q., Noguchi, N., and Dickson, M. “Agricultural Automatic Guidance Research in North America.”, 2000, [12] Avital Bechar, Clement Vigneault “Agricultural robots for field operations: concepts and components” Biosystems Engineering, 2016 [13] Morton Lillomo.; Caruso, L.; Cerruto, E.; Emma, G.; Schillaci, G. A Prototype of SelfPropelled Sprayer to Reduce Operator Exposure in Greenhouse Treatment. September 2008 [14] Mohammad Thariq Hameed Sultan, Binod Poudel, Ritesh Sapkota, Ravi Bikram Shah, Navaraj Subedi, Anantha Krishna G.L, Design and fabrication of solar powered semi-automatic pesticide sprayer 55 [15] Shiva Gorijin Harshit Jain,Nikunj Gangrade, Sumit Paul, Harshal Gangrade, Jishnu Ghosh, Design and fabrication of Solar pesticide sprayer [16] Tanha Talaviya, Kiran Kumar B M, M S Indira, S Nagaraja Rao Pranupa S, Design and development of Three DoF Solar powered smart spraying agricultural robot. [17] Paul R. Fisher, Julian Senchez-Hermosilla, Francisco Rodriguez Ramon Gonzalez, Jose Luis Guzman and Manuel Berenguel, A mechatronic description of an autonomous mobile robot for agricultural tasks in greenhouse
Copyright
Copyright © 2022 Dr. A. H. Ingle, Mahesh D. Meshram, Manish I. Thakre, Mo. Sahil K. Sheikh, Nayan M. Potdar, Nihal J. Jadhao, Niraj R. Dudhe. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET44632
Publish Date : 2022-06-20
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online