

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Fabrication of Automatic Coe Feeding Machine
Authors: Kshitij Patil, Sanketsing Sunilsing Pardeshi, Swapnil Sharad Lokare, Sanket Shivaji Jadhavar, Mrs. R. S. Patil
DOI Link: https://doi.org/10.22214/ijraset.2022.42779
Certificate: View Certificate
Abstract
Conventionally the feeding of the cattle is manual which is time consuming. In this project, an automatic cattle feeding system is introduced where food feeder follows the path through a predetermined distance and places the feed to the cattle by the side of the feed fence. The prototype is developed using Arduino circuit for the operation of feed mechanism with certain time space. The motors are interfaced to operate in either direction. A rail bogie is operated by a DC motor to feed the cattle at certain time space. This mechanism is basically controlled by pulling mechanism by winding the rope around the motor operated shaft.
Introduction
I. INTRODUCTION
In certain regions of rural area, cow feeding is done conventionally by hand and periodic time stamps by human interference. This process is really hectic and time consuming, the cattle need to be fed. It is a simple statement, but one that resonates with every cattle producer. To make this necessary task easier for farmers, the concept of automatic cattle feeding system came into existence. Automatic Cattle Feeding System is a robotic feeding system which consists of a battery operated robotic vehicle that is capable of feeding an equal amount of feed. The feed is manually loaded in the feeder and it follows the feed fence through a pre-determined route until it reaches the feeding fence at a pre-determined distance where it places the feed through a moving bogie. To ensure the precise, timely and adequate feeding of cattle of each group, this project is applicable in an agricultural country like Nepal where the lack of manpower in cattle farming has an adverse effect on dairy production. The main objective is to design an automatic cattle feeding system that moves around the fence to distribute the feed uniformly. With the application of the rail following robot, remarkable changes can be brought to this field. In this we are using Arduino circuit for controlling the motor for feeding the cattle after certain time space. With the application of Automatic Cattle Feeding system uniformity in feed distribution can be maintained. With submersible pump water is also given to the cattle at fixed time according to the setting of aurdino Uno board. This project helps for taking care of cattle. Automatic cow feeding can be helpful to increase the time management of the cow feeding and production of milk from cow will be increased due to time to time feeding of feed and water. In future we can go fully automatic like continuous water supply to cattle, and with help of different sensors we can start the boogie and water supply to the cattle. Automatic cow feeding machine can be installed to dairy farms for reducing the labour cost.
II. METHODOLOGY
We used an Audrino board, a submersible pump, a dc motor, and a 12v battery in our project, and we manufactured all of the mechanical pieces ourselves. The purpose of a submersible pump is to provide water to cattle cows at predetermined intervals according to programming. The dc motor and submersible pump are controlled by Aurdino. The bogies are controlled by a dc motor. When the dc motor is turned on, it begins to pull the bogies. The feed has already been placed in the bogies, and because to gravity, the grain will be in front of the animals. The battery will provide a constant supply of power to the circuit and motors.
A. Dc Motor
A DC motor is an electric machine that converts electrical energy into mechanical energy (rotational energy).. The motors are powered by a 12V battery that can be recharged. The battery and the aurdino circuit are connected to this dc motor. According to the aurdino programming, it will turn on the pulling bogie. It is an electrical component that transfers electrical energy into mechanical energy. The electromagnetic impact on the coordinate causes mechanical power to follow it when current is supplied to it. The robot is driven by a DC motor. Use a 4 dc motor with a 500 rpm. The motor's speed is determined by the diameter of the wheel and the RPM of the motor. Torque is inversely proportional to revolutions per minute. If the motor's speed is progressively increased.
B. Arduino Circuit
Arduino is a free and open-source platform for making electronic projects. Arduino is made up of a hardware programmable circuit board (also known as a microcontroller) and software, known as an IDE (Integrated Development Environment), that runs on your computer and is used to create and upload computer code to the physical board. The Arduino platform has grown in popularity among those who are just getting started with electronics, and for good cause. The Arduino does not require a separate piece of hardware (called a programmer) to load fresh code into the board, unlike most earlier programmable circuit boards. A USB cord is all you need. Furthermore, the Arduino IDE makes programming easier by using a simplified form of C++. Finally, Arduino comes with a multiple ports to connect with computer to put the coding.
C. Submersible Pump
A submersible pump consists of an airtight sealed motor that is tightly connected to the pump body. The main benefit of this type of pump is that it avoids pump cavitation, which is a problem is caused by a large elevation difference between the pump and the fluid surface. Because the entire system is submerged in the fluid, a submersible pump never needs priming. Submersible pumps are efficient because they need less energy to move water into the pump. Water pressure pushes the water into a submersible pump, which "saves" a lot of the pump's energy. Here are some before and after photos of Pump Man Social's work at various places.

D. 12v Battery
To produce a voltage, a lead acid cell must first receive a (forming) charge voltage of at least 2.1 volts per cell from a charger. Lead acid batteries do not produce electricity on their own; instead, they store it from another source. Because they solely hold a charge, lead acid batteries are referred to as storage batteries. The quantity of charge that lead acid batteries can store is determined by the size of the battery plates and the amount of electrolyte. The amp hour (AH) rating of a battery describes the size of this storage capacity. A common 12-volt battery in an RV or marine craft has a 125 AH rating, which implies it can produce 10 amps of power for 12.5 hours or 20 amps for 6.25 hours. To boost the overall AH capacity, lead acid batteries can be connected in series.
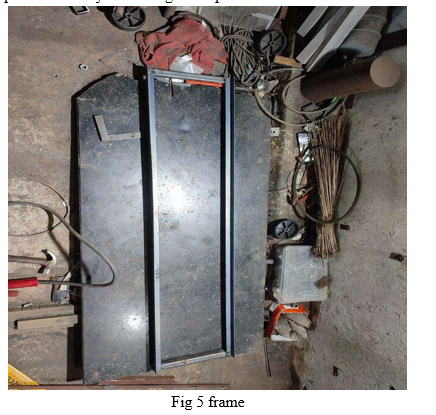
E. Frame
A framed structure is a structure having the combination of beam and column to resist gravity and other lateral loads. These structures are generally used to overcome the large forces, moments developing due to the applied loading. During Fabrication of a Frame the material which is used for Fabrication process is mild steel. We have used 142 × 31 cm for the manufacturing of frame. The operations that are perform during fabrication of frame is Cutting operation, The Grinding Machine is used for the cutting purpose from this proper dimensional part get fabricated. The frame mainly consist of 6 angel have equal length of 4 feet and 2 angel of 2 feet. After that the joining process perform on the frame, with the help of metal arc welding process the all cutting parts are get welded. By using these steps the assembly of frame get completed.
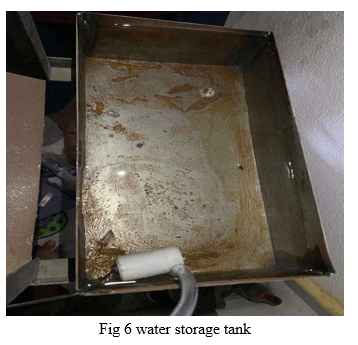
F. Water Storage Tank
The purpose of water storage tanks is usually to maintain water service pressure, maintain emergency storage supply and pressure during power outages, and provide equalization volume to meet peak demands. Storage tanks serve two major purposes. One is to provide storage volume and the other is to provide pressure to the distribution system. A particular tank can serve one or both purposes depending on its location within the system and its type of configuration. During the fabrication of water storage tank MS sheet metal of size 30×17×15which is having length width height With the help of a grinding machine cutting operation on sheet metal is performed. The sheet metal is cut according to required dimensions, then with the help of metal arc welding the part which is cut during cutting process is get welded. The foundation of water storage tank is get completed having capacity of 7650cm^3. The function of this water storage tank is to provide the required amount of water in front of cattle. Submersible pump is used to pump the water form tank to feed the cow.
G. Bogies
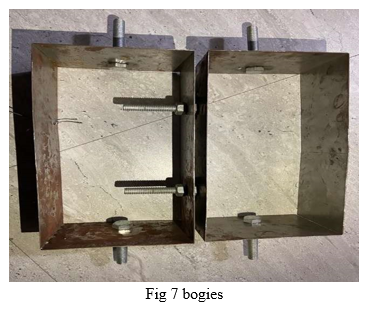
The primary function of the bogie is to give support to the body; to provide stability in curved and straight tracks; to provide smooth ride through the absorption of vibration. This is a set of wheels fitted under a Body or a locomotive for transporting goods or food.
MS sheet metal of size 30 ×13cm width and height is used for the fabrication of bogie .plates can be cut with the help of a grinding machine and joined with the help of a metal arc welding. for the movement of bogie over the frame the rolling bearing can be used for that Four holes can be done with the help of a drilling operation, The drilled hole are used to attach the nut, bolt and bearing assembly to maintain a constant contact with frame, also the nut bolt assembly is used to maintain the constant distance between two bogies.
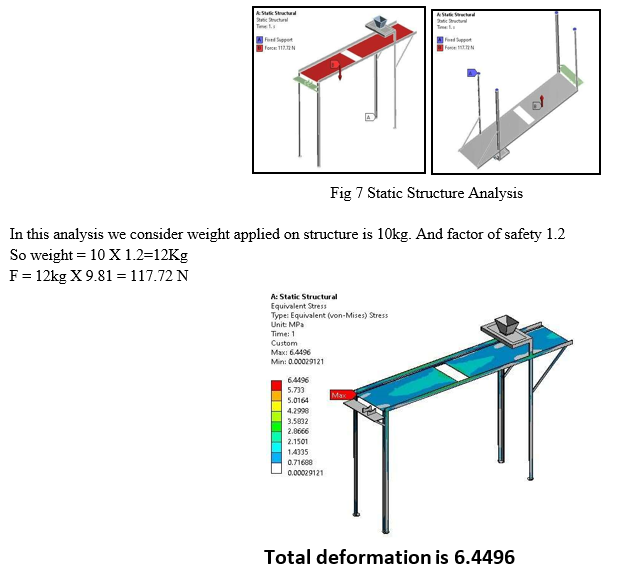
III. ANALYSIS
Step 1: Details of material namely copper, steel, grey cast iron, composite material, and fluid domain material is defined in engineering data. i.e., ANSYS default material is structural steel.
Step 2: Import of geometry created in any CAD software namely CATIA, PRO E, SOLIDWORK, INVENTOR etc. in geometry section. If any correction is to be made it can be created in geometry section in Design modeller or space claim.
Step 3: In model section after import of component
- Material is assigned to component as per existing material
- Connection is checked in contact region i.e., bonded, frictionless, frictional, no separation etc. for multi body components.
- Meshing or discretization is performed i.e., to break components in small pieces (elements) as per size i.e., preferably tetra mesh and hexahedral mesh for 3D geometry and for 2 D quad or trial are generally preferred.
Step 4: Boundary condition are applied as per analysis namely in fixed support, pressure, force, displacement, velocity as per condition.
Step 5: Now problem is well defined and solve option is selected to obtain the solution in the form of equivalent stress, strain, energy, reaction force etc.
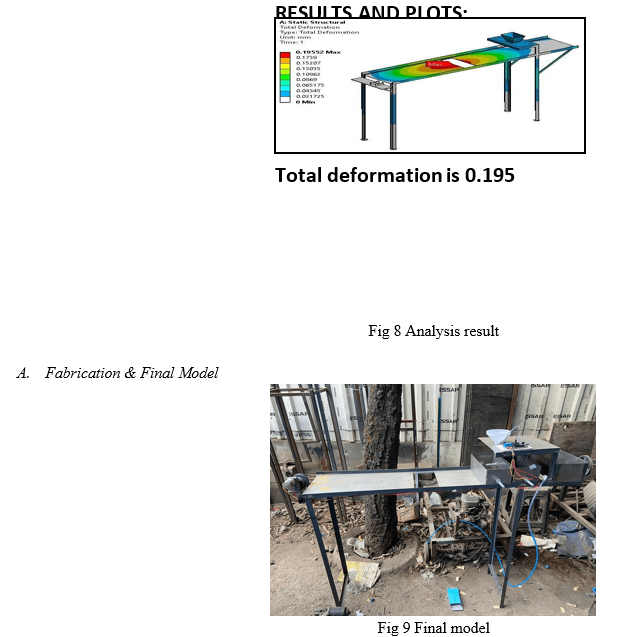
Conclusion
In this project we perform static analysis on cow feeding structure using ANSYS software. In ANSYS, perform analysis using static structural tool to find out total deformation and equivalent stress. The maximum deformation and equivalent stress obtained in structure is 0.19 mm and 6.44 Mpa respectively.
References
[1] P. Vaculík and A. Smejtková. “Assessment of selected parameters of automatic and conventional equipment used in cattle feeding”. [2] Pratiksha Karn, Nisha Somai, Sonam Ghimire, Preety Sitikhu, suban Kumar K.C. “Automatic Cattle Feeding System”. [3] R. Oberschätzl, B. Haidn, J. Neiber, S. Neser. “Automatic feeding systems for cattle – A study of the energy consumption of the techniques”. [4] Carlo Bisaglia , Zacharie Belle , Gijsbert van den Berg , Johanna C.A.M. Pompe. “Automatic vs. conventional feeding systems in robotic milking dairy farms: a survey in the Netherlands”. [5] Anne grothman, franz nydegger, christoph moritz,carlo bisaglia. “Automatic Feeding System for Dairy Cattle-Potential for Optimization In Dairy Farming”. [6] B. Foris, A. J. Thompson, M. A. G. von Keyserlingk, N. Melzer, and D. M. Weary. “Automatic Detection of Feeding and Drinking Related Agonistic Behaviour And Dominance In Dairy Cows”. [7] Prof. S.D. Bhalekar , Vikas S. Vishwakarma, Arvind Umbarkar, Bhaskar M.Tale. “Automatic Stack Feeding Machine”. [8] Francesco Da Borso, Alessandro Chiumenti, Maurizia Sigura, Andrea Pezzuolo “Influence of Automatic Feeding Systems on Design and Management Of Dair Farms”.
Copyright
Copyright © 2022 Kshitij Patil, Sanketsing Sunilsing Pardeshi, Swapnil Sharad Lokare, Sanket Shivaji Jadhavar, Mrs. R. S. Patil. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET42779
Publish Date : 2022-05-16
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online