

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Fabrication of Autonomous Forklift
Authors: M. Bhuvaneswari, Aravinthan M, Arul Nilavan R, Bharath K A, Eniyan A
DOI Link: https://doi.org/10.22214/ijraset.2023.49630
Certificate: View Certificate
Abstract
Material handling is an important activity in factories that will be performed at a lower cost. The use of autonomous robots has the potential to reduce costs while also relieving humans of the physically demanding task of driving forklifts. This paper proposes a mechatronics design and implementation of an autonomous forklift.This paper takes a new look at autonomous forklifts in industrial settings. The proposed system employs advanced perception and control algorithms to enable unmanned operation in dynamic environments. The system employs a combination of sensors and motors to provide accurate situational awareness and obstacle avoidance. The proposed solution aims to increase work efficiency, enhance safety, and minimize the need for human intervention. The experimental results demonstrate that the system is capable of performing complex tasks such as pallet loading and unloading with precision and dependability. By increasing productivity, lowering costs, and improving workplace safety, the proposed model has the potential to have a significant impact on the material handling industry.
Introduction
I. INTRODUCTION
The Autonomous Guided Vehicle (AGV) was most probable the first industrial use of robotic systems in factories. The path is predefined and can be made visible (by marking it on a high contrast surface) or invisible (by making it invisible) (like magnetic tape). The AGV is a line-following robot equipped with sensors for obstacle avoidance and material transfer between fixed locations in the factory. This system has limited autonomy and is inconvenient when the path is changed, which is especially true on rigid manufacturing lines. Autonomous forklifts are a growing trend in the material handling industry, offering a range of benefits to businesses across various sectors. These innovative machines are designed to automate routine tasks, improve safety, and reduce operating costs, making them an attractive investment for companies looking to streamline their operations. The technology behind the autonomous forklifts is complex and multi-faceted, encompassing a range of components and systems. From sensors and navigation systems, to control algorithms and artificial intelligence, these machines are equipped with cutting-edge technology that enables them to operate with a high degree of accuracy and efficiency. This technology allows autonomous forklifts to navigate complex environments, avoid obstacles, and carry out tasks with minimal human intervention, making them ideal for arranging applications.
Despite the many benefits of autonomous forklifts, there are a number of challenges associated with implementing these machines in real-world scenarios. Issues such as limited sensor range, unreliable navigation systems, and the risk of collision with other vehicles or objects can make it difficult to deploy these machines effectively. However, with advances in technology and the development of innovative solutions, these challenges can be overcome, paving the way for a future in which autonomous forklifts are an integral part of the material handling industry. In this paper, we will explore the technology behind autonomous forklifts, the challenges faced in implementation, and the solutions developed to overcome these obstacles.
II. LITERATURE REVIEW
In Research by Renardo Baird a AGV research platform capable of operations in indoor environments which assists in pushing the boundaries of AGV capability was developed. The vehicle was designed to have a load capacity of 4000lb.It is equipped with cameras and laser scanners for navigation [1]. Analysis by Prashant Sankaran and team developed a deep learning methodology utilizing a deep neural network (DNN) for task selection for a fleet of vehicles from a list of tasks by assigning a task based on current traffic, potential travel paths and task location [2].
AashishKumar and Tufail developed a wireless operated forklift for warehouse management capable of operating at closer proximity to people. It is made possible by using Radio Frequency Identification (RFID) antennas to identify goods and stock shelves and thus increasing efficiency of process [3]. Mohamed Abdellatif and his team developed a mechatronic implementation of an autonomous forklift robot which can perceive its environment which is built using Microsoft Kinect head and readings from wheel encoders [4].
Andrew Correa and his team developed a multimodal framework for interacting with an autonomous robotic forklift. The key element for the interaction is the wireless interaction handled by a tablet where people can provide commands for robot movement [5].
Alireza Mohammadi developed a model predictive motion control system for motion planning for a non-holonomic autonomous robotic forklift which determines the control input for tracking a desired path through minimizing path following error [6].
J. Evans and his team developed an autonomous mobile robot carrier for transporting materials in hospitals and also in uncontrolled and unsupervised environments which can function upto 24 hours a day which operates via sonar and other sensors [7].Roger Bostelman developed an intelligent Mobility control System Program controlled autonomous vehicle project utilizing microwave, ADAR and LIDAR Systems for the navigation across the environment [8].
Ei Ei Wai from University of Technology, Myanmar developed an autonomous vehicle capable of lifting and placing objects in storage slots. It Functions by receiving signals from respected workstations which require materials for processing [9]. Tua Agutinus Tamba and her team developed an autonomous vehicle utilizing a vision-based sensors, laser range finder and sonar for navigation which functions by analyzing the kinematic equations for spin turn mechanism and providing a time varying feedback control to the system [10].
Pradnya T. Chauhan developed an unmanned autonomous forklift which uses LPC 2138, LCD, motor to operate and RF transceiver and different sensors such as position sensors and ultrasonic sensors for navigation [11]. Nilesh Sunil Mahajan and his team developed an autonomous vehicle with an inbuilt GPS receiver and OSM powered control mechanism which assists greatly at the automation of transportation of goods in industries [12].
University of Birmingham developed a goal finding robot with the help of sonar sensors it can identify position for the ball which has been provided to it by doing a 360-degree scan of the environment around it [13].
Sachin et al designed a robotic forklift to lift palletized materials which is capable of handling outdoor storage facilities. It utilizes radio frequency technology to increase visibility and human safety which can be operated from a distance of approximately 15 meters [14].
Wade and Waghchore studied 3 Wheel battery operated forklifts and developed an image module with remote technology for better visibility and safety to operators. It is also designed for lesser power consumption when compared to other machines [15].
"Autonomous Forklifts: A Review of State-of-the-Art Technologies and Applications" by Muhammad Akmal and Muhammad Usman Asad, published in the Journal of Advanced Transportation in 2021. This review provides an overview of the different types of autonomous forklifts, their applications, and the technologies used to enable autonomous operation. The authors discuss the advantages and challenges of using autonomous forklifts, as well as the potential impact on supply chain efficiency[16].
"A Systematic Literature Review on Autonomous Forklifts in Warehouses and Logistics" by Jesús González-Feliu and Marion Cottet, published in the International Journal of Logistics Research and Applications in 2020. This review analyzes the existing literature on autonomous forklifts in warehouse and logistics operations. The authors examine the benefits, challenges, and potential impact of autonomous forklifts on warehouse and logistics operations[17].
"Autonomous Material Handling Equipment: A Comprehensive Review" by Ankit R. Modi and Jay M. Lee, published in the IEEE Transactions on Automation Science and Engineering in 2019. This review provides a comprehensive overview of autonomous material handling equipment, including autonomous forklifts. The authors discuss the various technologies used to enable autonomous operation, the challenges and benefits of autonomous material handling, and the potential impact on manufacturing and logistics operations[18].
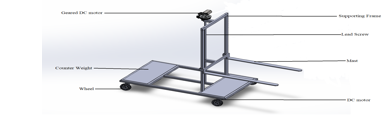
III. MODEL DESIGN
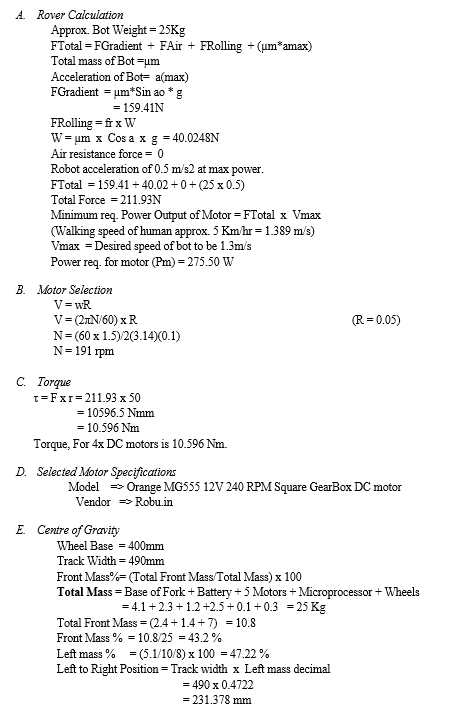
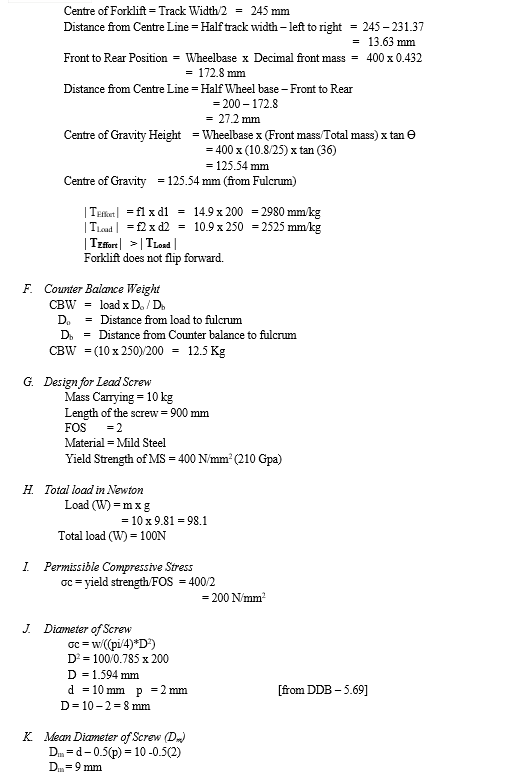
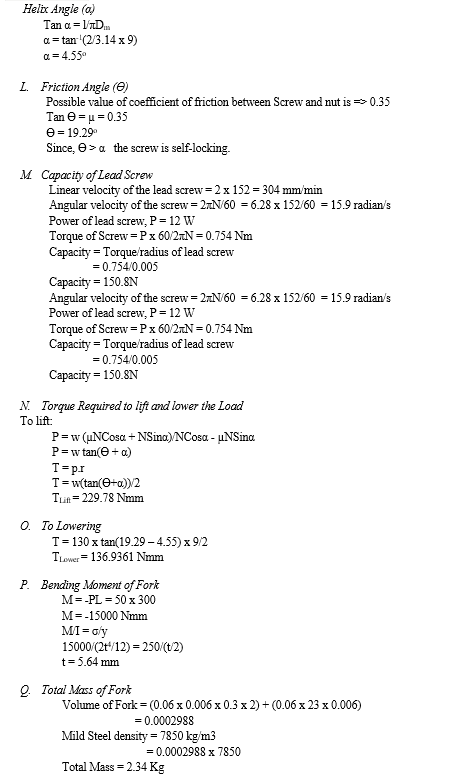
IV. DESIGN CALCULATION
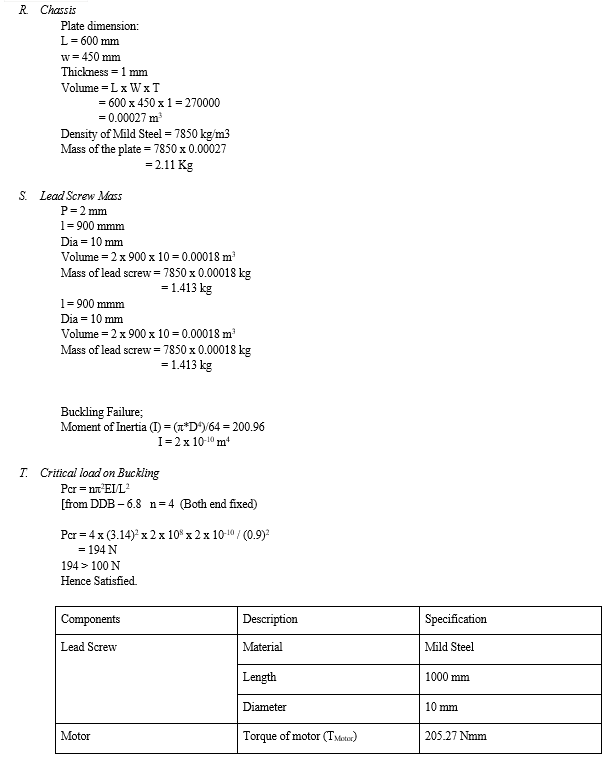
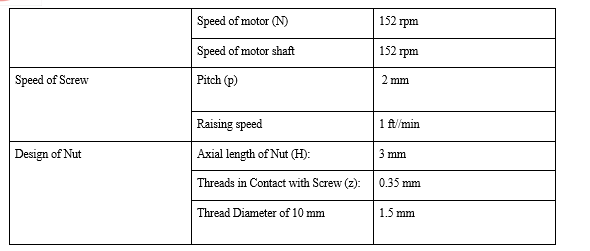
Mechanical calculations are an essential aspect of designing autonomous forklifts that can efficiently and safely lift and transport heavy loads. Some key calculations involved in the design of an autonomous forklift regarding various parts of the forklift are discussed below.
V. PROPOSED MODEL WORKFLOW
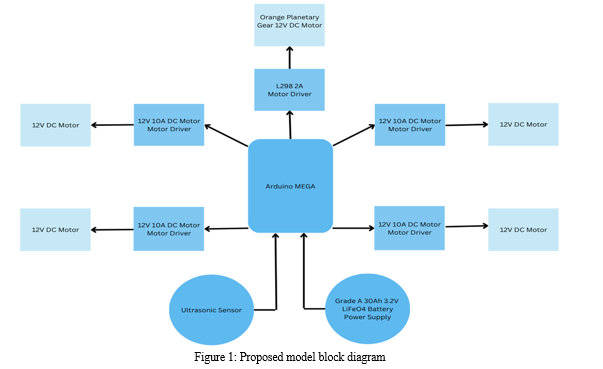
The Forklift functions with the help of ultrasonic which identifies the objects and workers in front of it and assists in the movement of the forklift. It is attached to the front of the forklift and is connected to an Arduino Mega board. A geared DC motor is also connected to an Arduino board which provides the motion power to the forklift. A Program is developed with the help of Arduino IDE which is capable of reading sensor data and controlling the motor to provide the changes required in the provided path to achieve the goal position without hitting any obstacles and workers. The speed of the motor and the distance at which the sensor should detect the obstacles was provided as parameters to the program. Arduino MEGA controls the entire movements by reading the input from the ultrasonic sensor and providing the output to the geared DC motor which is the actuator for the forklift. Furthermore, a mobile application is used to set additional parameters instantly to the forklift for assistance from human workers.
VI. MATERIALS AND DISCUSSIONS
Mild steel is a popular material used in the construction of forklifts. It is an affordable and readily available type of steel that is easy to weld, cut and form into various shapes, making it an ideal choice for manufacturing forklifts. The use of mild steel in forklifts provides several advantages. Firstly, it is strong and durable, which is crucial for withstanding the heavy loads and constant use of forklifts in industrial environments. Secondly, mild steel is resistant to corrosion, making it a suitable material for forklifts used in humid or wet conditions. Additionally, mild steel can be easily repaired or replaced if damaged, which is important for keeping maintenance costs low.
A. Sensors
An ultrasonic sensor is used for object identification which sends signals to the controller. These sensors emit high-frequency sound waves, typically in the range of 20 to 40 kilohertz, and then detect the echoes that bounce back from objects in their vicinity. By measuring the time delay between the emission and detection of these echoes, ultrasonic sensors can accurately determine the distance to the objects and also detect their presence.
B. Control System
Arduino Mega is a microcontroller board based on the ATmega2560 chip. It has 54 digital input/output pins, 16 analog inputs, 4 UARTs, a 16 MHz quartz crystal, a USB connection, and a power jack. When it comes to forklifts, Arduino Mega can be used to control various aspects of the forklift's operation, such as steering, lifting, and movement.
C. Actuators
A geared DC motor is a type of motor commonly used in forklifts and other industrial vehicles. It consists of a DC motor, which provides the rotational power, and a gearbox, which converts that rotational power into torque and speed suitable for the application. The gear assembly consists of a set of gears with different sizes, which work together to increase the torque and reduce the speed of the motor. This is known as gear reduction, and it is necessary to provide the high torque required to lift heavy loads in forklifts.
D. Power Source
LiFeO4 battery, also known as Lithium Iron Phosphate battery, is a type of rechargeable battery that is commonly used in forklifts and other industrial applications. It is a high-performance battery that offers several advantages over traditional lead-acid batteries.
VII. PROPOSED OUTCOME
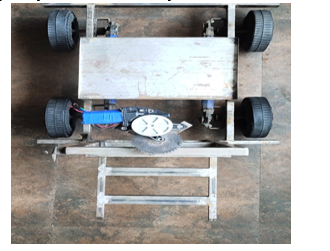
The Forklift is designed according to the requirements provided by the industry and its standards. It is designed to carry limited weighing boxes from the inventory to the production area with the help of a mobile controller without any human intervention.
Conclusion
In conclusion, autonomous forklifts are becoming increasingly prevalent in industrial settings due to their ability to improve safety, efficiency, and productivity. These vehicles are equipped with advanced sensors and algorithms that enable them to navigate through complex environments, avoid obstacles, and carry out tasks with a high degree of precision. Autonomous forklifts have proven to be particularly useful in warehouse and logistics operations, where they can move goods around the facility and perform other tasks without the need for any human intervention. Additionally, these vehicles can operate for longer periods without rest, reducing the need for staffing and potentially lowering operating costs. As the technology continues to improve, we can expect to see even more widespread adoption of autonomous forklifts in the future.
References
[1] Panara, K.S., Mishra, V.R., Patel, A., Patel, T.B., Dhivar, K.R. (2015). Construction of battery operated forklift. International Journal of Science Technology and Engineering, 2(4): 1-5. [2] Allwyn, L.M., Karan, K.N., Ganesh, A.B., Prathamesh,B.G., Omkar, K.S., Abhijeet, N.N. (2018). Design and development of mechanical forklift. International Research Journal of Engineering and Technology, 5(3):1125-1136. [3] Sachin, U.S., Tushar, S.S., Sachin, L.S., Prashant, K.R.(2014). Design, development and modeling of forklift. International Journal of Engineering Research and Technology, 3(4): 1234-1238 [4] Wang, Y., Zhao, D.X., Wang, L., Zhang, Z.X., Wang, L.L., Hu, Y.J. (2016). Dynamic simulation and analysis of the elevating mechanism of a forklift based on a power bond graph.Journal ofMechanicalScienceandTechnology,30:40434048.https://doi.org/10.1007/s12206-016-0817-y [5] Kumar, N.K., Arun, M., Kumar, K.R. Sabarinathan, R.,Yuvaraj, K. (2015). Design and fabricated pneumatic operated forklift. International Journal of Engineering Research and Science and Technology, 4(1): 291-296. [6] Pan, L., Du, Q.L., He, C.S. (2015). Design research on the hydraulic system of the working device of a forklift. 5thInternational Conference on Advanced Design and Manufacturing Engineering ICADME (2015), pp. 1813-1817. [7] Abdellatif, M., Shoeir, M., Talaat, O., Gabalah, M.,El Bably, M., Saleh, S. (2018), Design of an autonomous forklift using Kinect. MATECWeb of Conferences, 153:1-5. https://doi.org/10.1051/matecconf/201815304005 [8] Mohapatra, S., Patnaik, S., & Patra, S. K. (2021). Design and development of an autonomous forklift system for Indian industries. International Journal of Industrial and Systems Engineering, 38(3), 349-365 [9] Bhatnagar, S., & Sharma, V. (2021). Autonomous forklifts in Indian warehousing: An exploratory study of adoption and implementation challenges. International Journal of Logistics Systems and Management, 40(1), 1-20. [10] Singh, A., Sharma, A. K., & Singh, P. (2021). Development and testing of an autonomous forklift system for Indian industries. Proceedings of the 4th International Conference on Computational Intelligence in Data Science, 423-429. [11] Kumar, R., & Arora, P. (2020). Implementation of autonomous forklifts in Indian manufacturing industry: A review. Proceedings of the International Conference on Advances in Sustainable Technologies, 54-60. [12] Jha, S., Kumar, S., & Chakraborty, S. (2020). A comparative study of autonomous forklifts for Indian warehouse management. Proceedings of the International Conference on Industrial Engineering and Operations Management, 3748-3757. [13] Venkatesan, R., & Ramalingam, R. (2021). An experimental study on the performance of autonomous forklifts in the Indian manufacturing industry. Proceedings of the International Conference on Intelligent Sustainable Systems, 793-798. [14] Saxena, A., & Shukla, M. (2020). A review of autonomous forklifts for Indian logistics and warehousing. Proceedings of the International Conference on Innovations in Power and Advanced Computing Technologies, 1-6. [15] Raut, R., Gopalan, S., & Muthukumar, S. (2019). Development of an autonomous forklift for Indian industries. Proceedings of the International Conference on Robotics and Smart Manufacturing, 132-137. [16] Roy, R., & Chakraborty, A. (2018). An assessment of autonomous forklifts in Indian warehouses: Opportunities and challenges. Proceedings of the International Conference on Computing, Communication, and Intelligent Systems, 227-232.
Copyright
Copyright © 2023 M. Bhuvaneswari, Aravinthan M, Arul Nilavan R, Bharath K A, Eniyan A. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET49630
Publish Date : 2023-03-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online