

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Fabrication of Fire Extinguishing Drone Using CO2 Ball and Sprayer
Authors: Raghul A, Sarankumar M, Rajprasath B, Krishna Prasath P, Muruganatham S
DOI Link: https://doi.org/10.22214/ijraset.2022.46944
Certificate: View Certificate
Abstract
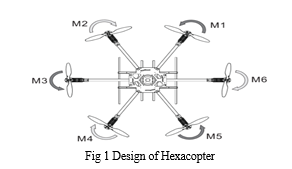
Now, fighting a fire in rugged mountain terrains or high building windows fire is difficult and dangerous for firefighters. High buildings containing floors at height, and reaching the position for deployment of external firefighting equipment and rescue operations may not be easy it takes some time, and fire will spread easily during that period. Meanwhile reaching farms located in rugged mountains, and terrains with firefighting vehicles are often impossible because of rugged road conditions and traffic. From this perspective view, to meet the need for a fast way to extinguish the fire in an area to be approached by using drone technology and to give safety for the public and firefighters. The fire extinguishing technique is detailed in this paper. The system is structured with six frames. Hexacopter (with release mechanism), Fire extinguishing ball, collision avoidance system. Hexacopter will carry a specific payload and be capable of throwing an extinguishing in an area that is chosen by the operator. This system has been implemented, constructed, and tested in a practical session. The results demonstrate the feasibility of drones in extinguishing fire in its initial stages, dropping a CO2 ball, and can fly back to firefighters for the next round.
Introduction
I. INTRODUCTION
Drones are very useful for firefighters in their field. It is used by firefighters to identify the spot where the fire was caught and is also useful for searching the safer building after the fire was extinguished. The effectiveness of drones is rapidly catching on, as agencies around the world begin to adopt this technology .to protect and save lives and properties, and extinguishing fires are the main goals of firefighters .until recently trucks, ladders, and hoses such low or insufficient technologies are in use at many of places .but now firefighting drones are replacing this old tech Machines as compared to the earlier methods. Drones are more help full to overcoming fire .due to urbanization, traffic, taller buildings, and new dangerous substances being used in construction, firefighters are looking at drone technologies to help them in achieving their goals.
II. LITERATURE SURVEY
Ali Magdi Sayed Soliman Suleyman Cinar Cagan, et.all... [1]. This study aims to encourage the idea of utilizing unmanned aerial vehicles in the fire- fighting applications. The main advantage of UAVs is their ability to work in rugged places and dangerous environments like fixed-wing vehicles, rotary-wing vehicles typically have the feature of flying slowly or hovering, taking off or landing vertically. For doing the task of dropping fire- extinguishing balls, rotary-wing UAVs are the proper vehicles to be used. Abdel Ilah N. Alshbatat Raj [2] The system is structured with five units: Hexacopter unmanned aerial vehicle (UAV), landmine detector, hands-free flight controller, emergency flight controller, and the main onboard flight controller. The drone is equipped with a landmine detector, an emergency flight controller, and the main onboard flight controller. Abdel ilahalshbatat, et, all.[3] The system was implemented and tested using an Arduino Nano board. The board was programmed and checked with the original circuitry kit. Experimental results have shown that the proposed control strategy provides an efficient collision avoidance scheme for an unknown environment. Agoston Rastas [4] This paper focuses mainly on operational and tactical drone applications in disaster management. A drone can be used for fire detection, intervention monitoring, and also for post-fire monitoring for special rescue teams, the drone application can help much in a rapid location selection, where enough place remained to survive for victims during an earthquake. Aníbal Ollerton., Luís Merino, [5] Summarizes different control techniques including both control architectures and control methods. Computer vision for aerial robotics is briefly considered. Bas Vergouw, Huub Nagel, Geert Bondt and Bart Custers [6]. The different types of drones can be differentiated in terms of the type (fixed wing multirotor, etc.), the degree of autonomy, the size and weight, and the power source. These specifications are important, for example for the drone’s cruising range, the maximum flight duration, and the loading capacity.
To perform a flight, drones need (a certain amount of) wireless communication with a pilot on the ground. In addition, in most cases, there is a need for communication with a payload, like a camera or a sensor. Burchan Aydin, Emre Selvi, Jian Tao and Michael J. Starek [7]. This paper examines the potential use of fire extinguishing balls co2 as part of a proposed system, where drone technologies are utilized cooperatively as a supplement to traditional firefighting methods. Scouting unmanned aircraft system (UAS) to detect spot fires and monitor the risk of wildfire approaching a building, Firefighting UAS autonomously travel to the waypoints to drop fire extinguishing balls. Casbeer.D.W. W; Beard. R. W; McLain.T.W., et, al [8] Since a forest fire is typically inaccessible by ground vehicles due to mountainous terrain. Effective UAV path planning algorithm utilizing infrared images that are collected on board in real-time. A new cooperative control mission concept is introduced where multiple low-altitude, short-endurance (LASE) UAVs are used for fire monitoring. Craig B. Clements, Shiyuan Zhong. Et, all.[9]. The first comprehensive set of turbulence and dynamics in an experimental wildland grass fire should help improve fire models. Chi Yuan, Youmin Zhang, Zhixiang Liu[10] This paper presents a systematic overview of current progress in forest fire fighting technology. First, a brief review of the development and system architecture of UAV systems for forest fire monitoring, detection, and fighting is provided. Next, technologies related to UAV forest fire monitoring, detection, and fighting are briefly reviewed, including those associated with fire detection, and diagnosis.
III. PROBLEM IDENTIFICATION
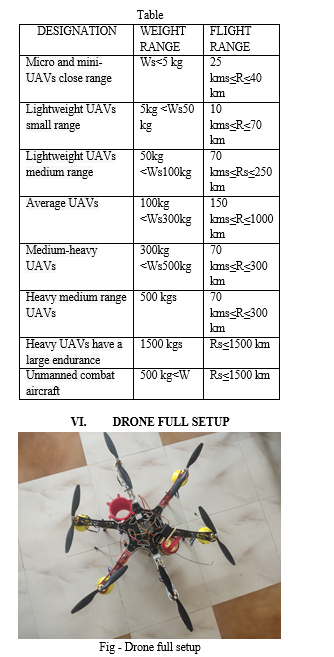
We have gathered some information from many review papers. we found some problems faced by firefighters and drones. Some of the problems are, the size and weight of the CO2 Ball are large to be attached to the drone. While using CO2 Balls. we can’t apply this drone for High building windows fires. The ball can be grabbed by a gripper so the extra weight is added to the drone, which affects lifting, and also can carry only one ball at a time. Fire in forest areas and cities is difficult for firefighters to reach the spot by firefighters, because of the heavy traffic. To control the fire in remote areas, reduce the risk of firefighters, and control the fires which are caught in woodland regions and buildings. To reduce the other expenses by using a drone. A drone may be fit for this job to extinguish the fire.
A. CO2 Ball Is Large To Be Attached To The Drone
The size and weight of the Co2 ball are large. So this will affect the lifting and the drone cant fly stable. so we decided to change the size of the Co2 ball.
B. Avoiding Gripper
If we use a gripper for grappling Co2 ball, only one ball can be carried at a time and extra weight is added to the drone. so a holder-type dropper is attached.
IV. DESIGN
To accomplish the necessary functions that the hexacopter will execute, three main designs were chosen. These designs involve the hexacopter's main components that will be optimized, which are the release mechanism and camera. The release mechanism designs were designed for the hexacopter to drop a chemical fire extinguishing grenade onto a selected location to extinguish fires or for testing and research motives. Additionally, a camera is to be installed on top of the hexacopter that will be utilized for recording, photographing, and inspecting purposes. The camera is used for many purposes like inspecting bridges, buildings, and others. These two key characteristics of the hexacopter are the focal points of the designs demonstrated in the subsequent sections.
Conclusion
Overall, this project boosted multiple aspects of engineering knowledge to complete. Basic designs were used when designing the structural framework of the hexacopter to ensure no net moments, torques, or forces from the thrust force were to be felt on the hexacopter. Keeping this in mind, a very balanced and symmetrical design came with the majority of the components for the hexacopter located in a centralized position among the plates of the hexacopter with the motors and propellers attached to the end of each arm. It was also noted, that residual torques occurred from the motors and propellers would need to be replaced, so opposing rotational patterns were designed to be placed adjacent to one another
References
[1] Ali Magdi Sayed Soliman, Suleyman Cinar Cagan & Berat Baris Buldum., The design of a rotary-wing unmanned aerial vehicle–payload drop mechanism for fire-fighting services using fire-extinguishing balls., SN Applied sciences., Article number: 1259 (2019). [2] Abdel Ilah N. Alshbatat Raj, Heuristic Optimization Technique to Locate and Avoid Buried Landmines: Drone-based Approach, Information Technology, and Computer Science,2018. [3] Abdel ilahalshbatat, Abdel-Hamid Soliman, Anwar alassaf, Fuzzy-based obstacle avoidance system for quadrotor unmanned aerial vehicle, International Journal of Soft Computing and Artificial Intelligence, vol 5, 2017. [4] Agoston Rastas., Drone Applications for Supporting Disaster Management.World Journal of Engineering and Technology., vol 3,.2015. [5] Aníbal Olleron , Luís Merino., Control and perception techniques for aerial robotic, Annual Reviews in Control, Volume 28, Issue 2, 2004. [6] Bas Vergouw, Huub Nagel, Geert Bondt and Bart Custers Drone Technology: Types, Payloads, Applications, Frequency Spectrum Issues, and Future Developments., The Future of Drone Use 1 st (online).,2016. [7] Burchan Aydin, Emre Selvi, Jian Tao, Michael J Starek, (2019) “Use of Fire-Extinguishing Balls for a Conceptual System of Drone-Assisted Wildfire Fighting\", volume 3. [8] Casbeer. D.W; Beard. R.W; McLain.T.W; Li. S.M; Mehra, R.K., Forest fire monitoring with multiple small UAVs., In Proceedings of the IEEE American Control Conference, 2005. [9] Craig B. Clements, Shiyuan Zhong, Scott Goodrick, Ju Li, Brian E. Potter, Xindi Bian, Warren E. Heilman, Joseph J. Charney, Ryan Perna, Meongdo Jang, Daegyun Lee, Monica Patel, Susan Street, and Glenn Aumann., Observing the dynamics of wildland grass fires: FireFlux—A field validation experiment., Bulletin of the American Meteorological Society ., vol 9,.2007. [ [10] Connie Phan, Hugh H.T. Liu, A cooperative UAV/UGV platform for wildfire detection and fighting, Asia Simulation Conference - 7th International Conference on System Simulation and Scientific Computing., 2008. [11] Claesson, D. Fredman, L. Svensson, M. Ringh, J. Hollenberg, P. Nordberg, M. Rosenqvist,T. Djarv, S. Österberg, J. Lennartsson & Y. Ban., Unmanned aerial vehicles (drones) in out-of-hospital-cardiac-arrest., Scandinavian Journal of Trauma, Resuscitation and Emergency Medicine, Article number: 124, 2016. [12] Fu-Hsuan Wen, Fu-Yuen Hsiao, and Jaw-Kuen Shiau, Analysis and Management of Motor Failures of Hexacopter in Hover, Department of Aerospace Engineering,2021 [13] Huy X. Pham; Hung M. La; David Feil-Seifer; Matthew Deans, A distributed control framework for a team of unmanned aerial vehicles for dynamic wildfire tracking, 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)., 2017. [14] Hugo Rodrigue, Seunghyun Cho, Min-Woo Han, Binayak Bhandari, Jae-Eul Shim & Sung-HooAhn ., Effect of twist morphing wing segment on the aerodynamic performance of UAV., Journal of Mechanical Science and Technology., 2016. [15] James F. Campbell, Donald C. Sweeney II, Juan Zhang, Strategic Design for Delivery with Trucks and Drones, College of Business Administration,2017. [16] Juan Jesús Roldán-Gómez, Eduardo GonzálezGironda, Antonio Barrientos., Applying Drone Swarms to Improve Firefighters’ Efficiency and Safety., A Survey on Robotic Technologies for Forest Firefighting,.vol 11.,2021. [17] Luigi Di Puglia Pugliese,? , Francesca Guerriero, Giusy M, Using drones for parcels delivery process, International Conference on Industry 4.0 and Smart Manufacturing [18] Lauren Bowers Reddy, Daniel DeLaurentis, Opinion Survey to Reduce Uncertainty in Public and Stakeholder Perception of Unmanned Aircraft, TRB Graduate Research Award Program on Public-Sector Aviation Issues, 2016. [19] Laszlo.B.; Agoston.R.; Xu . Q, Conceptual Approach of Measuring the Professional and Economic Effectiveness of Drone Applications Supporting Forest fire Management, Procedia Engineering, Volume 211, 2018. [20] Martínez-de Dios, J.R.; Merino, L.; Caballero, F.; Ollero, A., Automatic forest-fire measuring using ground stations and unmanned aerial systems, Computer Vision and Control Group, Universidad de Sevilla, Seville, 2011. [21] Merino.L., Caballero. F, Martinez-de Dios, J.R., Ollero .A. Cooperative Fire Detection using Unmanned Aerial Vehicles, Proceedings of the 2005 IEEE International Conference on Robotics and Automation, 2005. [22] Martinez-de Dios, J. R., Arrue, B. C., Ollero, A., Merino, L., Gómez- Rodríguez, F. Computer vision techniques for forest fire perception, Image and Vision Computing, Volume 26, Issue 4, 2008. [23] Mark A. Finney., An Overview of FlamMap Fire Modeling Capabilities., In Fuels Management—How to Measure Success: Conference Proceedings, 2006 [24] Norman H. M. Li, Hugh H. T. Liu., Formation UAV flight control using the virtual structure and motion synchronization., American Control Conference., 2008. [25] N.Jayapandian., Cloud Enabled Smart Firefighting Drone Using Internet of Things., International Conference on Smart Systems and Inventive Technology.,2019. [26] Oyvind Magnussen, Geir Hovland, Morten Ottestad., Multicopter UAV design optimization., 10th International Conference on Mechatronic and Embedded Systems and Applications (MESA)., vol 1., 2014. [27] Patricia L. Andrews, Faith Ann Heinsch, and Luke Schelva, How to Generate and Interpret Fire Characteristics Charts for Surface and Crown Fire Behavior, United States Department of Agriculture., 2011. [28] Pengfei Zhu, Longyin Wen, Dawei Du, Xiao Bian, Heng Fan, Qinghua Hu, Haibin Ling, Detection and Tracking Meet Drones Challenge, Computer Science > Computer Vision and Pattern Recognition,2021. [29] [30].Piotr Kardasz, Jacek Doskocz , Mateusz Hejduk , Pawe? Wiejkut and Hubert Zarzycki, Drones and Possibilities of Their Using, Journal of Civil & Environmental Engineering,2016. [30] Purnima T. Godhole, Pranav A. Sawant, Rushiraj R. Shirke, Saurabh S. Surve, \'Adit B. Tambe, Study of modeling and testing of fire-fighting drone using a hose pipe, International Journal of Creative Research Thoughts, vol 6. [31] Reece A. Clothier, Dominique A. Greer, Duncan G. Greer, Amisha M. Mehta, Risk Perception and the Public Acceptance of Drones, Risk Analysis, 35, Issue 6, 2015. [33]. Richard C. Rothermel and John E. Deeming, Measuring and Interpreting Fire Behavior for Correlation with Fire Effects, General Technical Report INT-93,1980. [32] Satish Chaudhary, Jagriti Verma, Aditya Pratap Singh, Manish Awana, Devender Sharma., Design and Development of a Multi-Application Hexacopter., International Journal for Research in Applied Science & Engineering Technology (IJRASET)., vol 9.,2021. [33] Tiberiu Paul Banu, Gheorghe Florian Borlea and Constantin Banu, The Use of Drones in Forestry, Journal of Environmental Science and Engineering,2016. [34] Thomas Babu Alappatt, Sharanya S. Ajith, Joel Jose, John Augustine, Vishnu Sankar, John M. George. Design and Analysis of Fire Fighting Drone, Lecture Notes in Electrical Engineering., vol 711, 2021. [35] U M Arief, S Subiyanto, T Andrasto, S Sukamta, V N Sulistyawan, E Sarwono, A Alfian, P Wicaksono, P N Amelia, and A D H Putra, Design of hexacopter UAV system for disinfectant spraying, IOP Conference, Earth, and Environmental Science,2021 [36] Yu-Ting Wu, Zhen Qin, Amre Eizad & Sung-Ki Lyu ., Numerical investigation of the mechanical component design of a hexacopter drone for real-time fine dust monitoring, 2021. [37] Yan, C.; Zhang, Y.; Liu, Z. A survey on technologies for automatic forest fire monitoring, detection, and fighting using unmanned aerial vehicles and remote sensing techniques. Can. J. For. Res. 2015, 45, 783– 792. [CrossRef] [38] Yuan. C.; Liu. Z.; Zhang. Y, Aerial images–based forest fire detection for firefighting using optical remote sensing techniques and unmanned aerial vehicles, Intelligent Robotic System. , 2017. Abudhahir A., Mohankumar N. and Siva Kumar M., (1998), First edition, Control Systems, JJ Publication, Tamilnadu, India. [39] Senthil Kumar M., (2004), An Approach to Adaptive Kanban System, M.E.. thesis, Anna University, Tamilnadu, India. [40] Malayappan S., Siva Kumar M., Neethimanickam and Venkatachalam G., (2003), Design of Wind Turbine Blade and An Analysis of Wind Turbine Tower using Finite Element Analysis, Proc. Of the Twenty-Sixth National Renewable Energy Convention of Solar Energy Society of India and International Conference on New Millennium – Alternative Energy Solutions for Sustainable Development, PSG Tech., Coimbatore, 2003: 437 - 448. NOMENCLATURE Symbol Meaning Unit w Overall weight kg?m/s 2 T Thrust N/m2 V Velocity m/s P Load N t Stress N/m2
Copyright
Copyright © 2022 Raghul A, Sarankumar M, Rajprasath B, Krishna Prasath P, Muruganatham S. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET46944
Publish Date : 2022-10-01
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online