

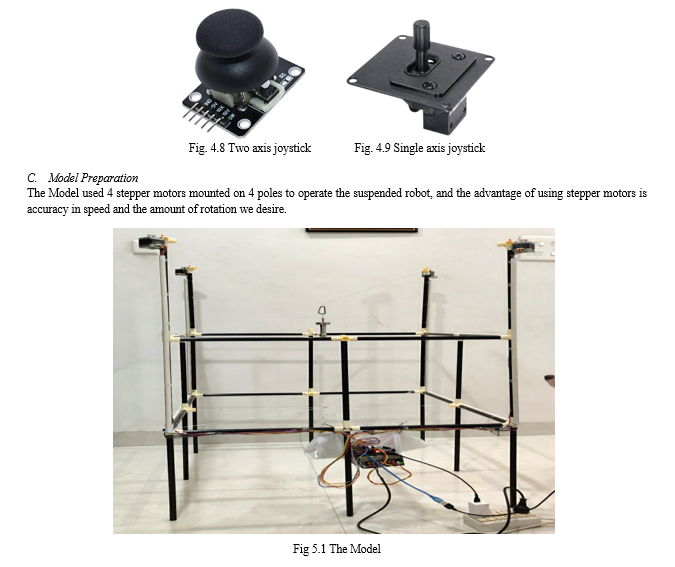
Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Inverse Kinematics Analysis of Cable-Suspended Parallel Robot ‘FarmPet’ for Agricultural Applications
Authors: Sameerjeet Singh Chhabra, Dr. Shubhrata Nagpal
DOI Link: https://doi.org/10.22214/ijraset.2023.48965
Certificate: View Certificate
Abstract
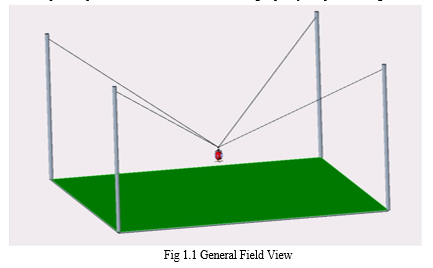
Farming is a very important part of our country in different manners. Traditional methods are not effective for matching today’s world requirements in farming. The world requires efficient & effective technological advancements in farming that are smart, cheap, effective as well as durable & can increase significantly yield. This need gave birth to the idea of a cable suspended farming robot, called \"FarmPet\". FarmPet is based on a simple mechanism which helps to hover a robot over the field with the help of multiple rope supports. Idea utilizes calculus equations, software programming & inverse kinematics to move the central robot. Through arrangement of four poles (minimum) with a stepper motor mounted on each, cables are driven from each motor and a central robot is fixed at the common end of the cables & is moved around the field supported by these cables. Software algorithms make the central robot move with constant velocity in a circular or straight line path over the field by continuously changing cable lengths in coordination. Robot is designed to perform agricultural tasks like pesticide sprinkling, insecticide sprinkling, spreading seeds, field surveillance, surveying crops & land mapping for efficient cropping without touching crops on ground or even disturbing sensitive crops. Practical testing on the model proved successful, calculations were found efficient and the algorithm worked.
Introduction
I. INTRODUCTION
As per today’s world requirements, cable-suspended agricultural robot can prove to be very durable and a daily use all in one machine for farming. Its life is expected to be around 8-10 years theoretically because of simple mechanisms & less complicated hardwares used. The robot assists in many involved field processes in agriculture. It is supported by four cables (minimum) that are connected to winches on respective poles at the same time. It has a lifting capacity of up to 50 kilograms.
It serves several functions, including phenotyping (the study of crops), manure sprinkling, fertilizer sprinkling, pesticide sprinkling (a daily activity) and field surveillance (which isrequired). It is capable of performing a wide range of farm-related tasks on a daily basis. It can be controlled manually for the farmer's convenience, as well as automatically. It is an Internet of Things that can be controlled remotely. Farmers can work in any weather condition by remotely controlling it. The required power for the robot is generated by renewable energy sources such as solar panels and wind turbines. Further advancements of the robot will enable it to perform previously unknown tasks in the field of farming in the future.
Sensors such as lidar, ultrasound , camera, and so on will allow the robot to collect data for farmers to inspect crops. The robot is designed to carry many different attachments one at a time at the suspended end for various uses, allowing the farmer to do different activities as needed.
II. LITERATURE REVIEW
Many researchers have been working for the betterment of agriculture around the world. Some of their work has been reviewed and considered for further research .
- Kale et.al.: The goal of the FREYR drone is to create a quadcopter that can carry pesticides and spray it all over the field, reducing farmers' workload and completing their tasks faster. Pesticides and fertilizers must be used correctly in agricultural areas to maximize crop production. This will be used to create a user-friendly interface for farmers.. It assists farmers in spraying pesticides uniformly across their land, reducing their workload. The farmer can use an android app to control the drone, and he can connect to the app using a Wi-Fi module (ESP 8266) that is interfaced to the drone.
- T. Meshram et.al.: Spraying pesticides is a dangerous but necessary operation in agriculture to protect plants from destructive organisms. Many farmers employ manual pesticide spraying systems, which they carry on their shoulders and use to spray the entire plant. As a result, dangerous pesticide chemicals diffuse into the air and may enter the bodies of farmers and farm workers through the respiratory system, affecting largely their body parts, and many farmers have died as a result. For this major problem, we propose that using a robotic system in agriculture is the ideal way for performing this activity.
- Karvinen et.al.: This work reviews the state-of-the-art in mechanical characteristics of wire ropes and dynamics simulation of wire rope devices. In the section on mechanical properties, a significant emphasis is placed on the tension-dependent Young's modulus and the wire rope damping. The simplification of the complex system and the connection between the rope and the pulley are highlighted in the section on dynamics simulation. There is a lot of research on modeling material properties, and they can be precisely anticipated. New improvements in the dynamics simulation of wire rope systems are yet possible.
- Hernandez et.al: Because of the constraints of fossil fuels, emissions from the use of solar cells have increased in recent years. Solar cells must follow the sun's radiation to receive more energy due to the sun's changing state. However, in this study, a genetic algorithm was used to model and analyze a sun tracking system in order to determine the ideal angle in photovoltaic systems for generating the most power (GA). The GA genetic algorithm is introduced in this study as a control system that optimizes the PV system's output energy by modifying the spatial angles of the solar panel in both vertical and horizontal axes. The ideal panel position angles are computed using Matlab software to capture the most sun and optimize output energy in this method, which does not require any additional hardware.
- Honkalas et.al.: This study aimed to analyze detailed literature on the design of worm and worm wheel in recent years. Research has shown that several researchers developed and proposed methods for predicting the effectiveness and improved design of worm gearboxes in a number of aspects, such as tribology, analysis and geometry. In addition, it can also be easily seen that the fields of worm and worm wheel studies are based on the assumption that the enhanced configuration and performance of worm and worm wheel for a gear motor has still not been identified for standard applications.
- Bai et.al.: Field-based high throughput plant phenotyping has recently gained increased interest in the efforts to bridge the genotyping and phenotyping gap and accelerate plant breeding for crop improvement. In this paper, the researchers introduce a large-scale, integrated robotic cable-driven sensing system developed at University of Nebraska for field phenotyping research. It is constructed to collect data from a 0.4ha field. The system has a sensor payload of 30kg and offers the flexibility to integrate user defined sensing modules. Currently it integrates a four-band multispectral camera, a thermal infrared camera, a 3D scanning LiDAR, and a portable visible near-infrared spectrometer for plant measurements. Software is designed and developed for instrument control, task planning, and motion control, which enables precise and flexible phenotypic data collection at the plot level.
7. Rahaman et.al.: In this research paper researchers discuss the necessity of high yielding crops and crops that can adapt to the future climate changes as these properties are required with the increase in population and simultaneous food demand. According to them, to solve these global challenges, novel approaches are required to identify quantitative phenotypes and to explain the genetic basis of agriculturally important traits. These advances will facilitate the screening of germplasm with high performance characteristics in resource-limited environments. High-throughput phenotyping platforms have also been developed by researchers that capture phenotype data from plants in a non-destructive manner. In this review, they discuss recent developments of high-throughput plant phenotyping infrastructure including imaging techniques and corresponding principles for phenotype data analysis.
8. Newman et.al.: In this review, researchers work on the design of a cable-suspended robot or cable-driven parallel robot for phenotypic study of crops without interfering with their natural growth. Researcher does analysis on design of robot, derivation of mathematical equations to study position of robot, simulation, control of robot's cable, pole positions, navigation of robot, disturbances that may be caused to robot, Power system design and has also developed cable system control software based on mathematical research. Researcher also designs a scaled down model to work with and has proven that the robot is useful.
9. Sharma et.al.: Advancements in smart farming and precision agriculture provide vital instruments to address agricultural sustainability concerns in order to handle the ever-increasing complicated problems in agricultural production systems. Machine learning, big data analytics, cloud computing, and blockchain are examples of disruptive information and communication technologies that can help with issues like productivity and security. The study demonstrates how ML approaches can improve ASCs and contribute to ASC sustainability.
It has been concluded that there is still a big scope of work in this field and the world is moving towards automation .
III. PROBLEM IDENTIFICATION
From a modern perspective, agriculture is one of the most vital and crucial sector. As the world's population grows, so does the demand for food. In such a setting, small-scale farming is ineffective; instead, we must modernize agricultural practices, improve them, and invent new ones.
For large-scale farming, common or traditional methods are ineffective, thus we must develop and implement new approaches. The next generation will be the science generation; advancements will make our lives much simpler, yet agriculture is still lagging behind in terms of modernity.
Maybe not that much, but the current equipment available today, such as drones, sprayers, and other extra possibilities, is highly expensive and difficult to operate for low-level farmers; there's also the matter of availability, and if they are even accessible. Even if it is available, it is an issue if the facilities for timely maintenance and repair are available at the appropriate time and in the right place when they are required.
IV. METHODOLOGY
A. Basic Procedures
- The desired field is to be surveyed for determining best locations for pole installation.
- Field dimensions are required to estimate hardware requirements.
- Suitable locations are determined for the installation of poles based on efficiency
- Poles are installed on the suitable locations.
- Winches, stepper motors and other parts are installed on each pole.
- Solar panels or wind turbines are installed at the pole top for electricity generation.
- Power output from the battery is connected to the system and winch to supply electricity.
B. Robot Installation
- The Robot or the central device is installed to the common end of the cables suspended & winches release and pull their ropes based on mathematical relations (pre-derived) to move the robot at a desired speed on a desired path.
- Speed of ropes vary with the robot's instant location, so motors continuously update their respective speeds.
V. WORKING OF THE SYSTEM
- A feedback sensor (a motor with small radius) will be used to determine the instantaneous speed of the rope, as the radius of the winch may change during operation, we cannot rely on the winch speed.
- The rope will roll over this feedback sensor which will be placed at the suspension point on the pole. The feedback motor will give reading of its RPM by using a monopolar inductive sensor (which uses a magnetic sensor to determine speed of motor without any physical contact) which will help to determine speed of rope as no slip is possible due to friction.
- Feedback motor will send signals to the CPU and will indirectly control the speed of the winch as per the requirement during the whole operation.
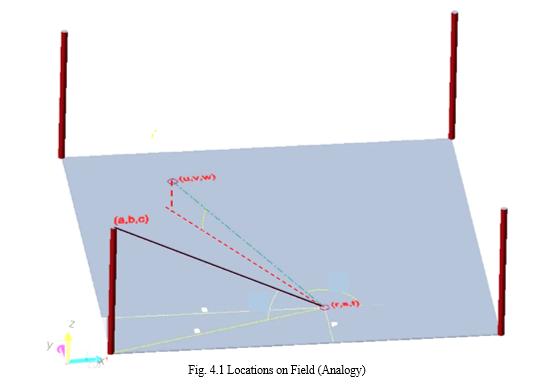
- The change in length of cable at every instant can be known from this formula: System will always make sure that the change in length of the suspended rope at the final point always corresponds to the length which was meant to be there.
- System will run the motor till the point where the desired length of rope is obtained and will follow the speed graph also. This is done because, if errors cause variation in speed, the length of cable suspended or pulled will differ from the desired final length, so the winches will work till the desired(known) length is obtained, this needs pre-calculations and data maintenance of the lengths of each rope suspended at every instant.
VI. METHODS FOR SMOOTHER MOVEMENTS
- Few more efforts on calculations are to be made to slowly accelerate & decelerate the robot. So, we choose an acceleration/deceleration value, this is done to smoothen the start and end of operations otherwise a jerk will be caused to the cable suspended robot & this will cause disturbance in operations as well as tension pump in ropes.
- Hydraulic dampers can be used to damp the jerks caused to the robot during functioning.
- According to the value of acceleration we use basic kinematic formulas, now the velocity V is variable for the time until the robot reaches its intended velocity.
VII. MANUAL CONTROLLING OF THE ROBOT
A. In Horizontal Plane
- Farmpet will provide a Joystick to the farmer which will directly control robot’s movement over the field in real time
- With the movement of the joystick, the system will receive a command to move the robot in an angle made by the joystick from +x-axis in ACW direction (+x-axis is towards the right of the controller horizontally).
B. In Vertical Plane
- In this maneuver, the robot is brought down to very low altitude, up to 0.5m.
- This is done at a very low speed of about only 1-2 cm/s.
- The controller will have two axis joystick for horizontal movements and single axis joystick for vertical movements.
The length of rope is to be pulled or released in an time interval of journey can be calculated as we know the instant speed of the rope. Journey time can also be calculated by knowing the length of the path.
VIII. APPLICATIONS OF THE FARMPET ROBOT
A. Liquid Sprinkling
Crops regularly require manure, fertilizer, pesticides & insecticides to keep themselves healthy. Farmpet robot is designed to efficiently accomplish this task.
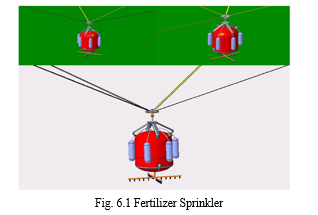
- Farmpet has its own integrated sprinkling system, whose container is just to be filled once for a large area of sprinkling. The sprinkler has a range of 15m.
- It will have automatic sprinkling option, manual sprinkling option and speed of sprinkling will also be variable.
- Sprinkling unit works with the help of air pressure inside the tank, which is developed by compressors situated outside the tank.
- Hydraulic dampers will play a significant role during sprinkling to stabilize the robot while it is accelerating, decelerating or when it’s facing high winds.
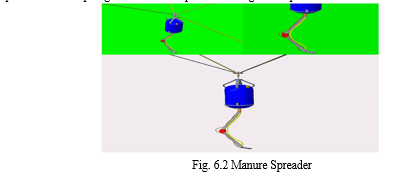
B. Manure, Seeds Spreader & Soil Tester
- Manure is a very necessary entity for soil, as during crop growth, crops absorb nutrients from the soil which leads to decrease in nutrient content in soil.
- Farmpet has its own integrated manuring and seed sowing system. A container attachment is designed to attach to the central hanging unit, this system has its own battery backup which is solar powered.
- Robot arm is attached to this system to sow seeds with precision, and this attachment is also designed to spread manure over the field.
- Manure container is mounted onto the robot, filled with manure, from there, the system pushes this manure to the spreading machine.
- This setup can be used to plough out unwanted plants harming the crops.
6. Soil Analysis: this attachment has soil testing tools & sensors, which is very useful for planning to produce better yield.
C. Surveillance & Phenotyping
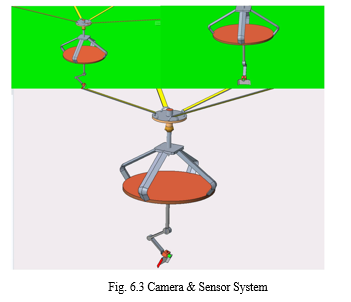
- Crop phenotyping aims at a quantification of quality, photosynthesis, development, architecture, growth or biomass productivity of single plants or plant stands using a broad variety of sensors and analysis procedures.
- Farmpet camera attachment has enough sensors to analyze and guard autonomously with the help of AL It will collect pictures of the crops and later analyze for the presence of any kind of insect or pest in the field.
- Lights fitted on the attachment will also help to guard the field at night time also.
- For very large fields, the Farmpet surveillance system is able to cover a large area of the field under surveillance, this will significantly help the farmer to know the dangers to crops at a very early stage.
- Surveillance system will help the farmer in monitoring, guarding and analyzing the crops and field.
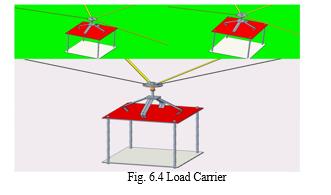
D. Load Carrier
- It helps in transporting the goods, tools and harvested crops around the field.
- As farming requires a lot of equipment for loading and moving goods and to lift and transport daily productions, this system will make those jobs easy and fast for the farmer, saving his time.
- Hardwares which are intended to be used in the Farmpet project can provide load bearing capacity of around 50 kgs when at peak height allowed and up to 80 kgs if load is carried at very low altitude from the ground.
- Farmpet not only saves farmer’s time but also saves his energy and makes his work more efficient, and such systems offered by this technology significantly impacts the output from the day and time consumption..
IX. RESULTS
- Farmers can do surveillance and monitor their farming which may allow us to see any issue with our crop at every stage of growth.
- Farmpet can be used for the purpose of crop analysis for major scale farming.
- Farmers can sprinkle pesticides, fertilizers & manure more easily and efficiently in a minimum time period without stopping, which is not possible in case of drones & humans.
- Farmers can do field surveys which facilitate the collection of local level information and is carried out to gather required information so as the problem under investigation is studied as predefined objectives.
- Farmers can do mapping for determining ways to utilize maximum area for sowing which will help us for better utilization and productivity of the same land.
- Investment cost in this technology which is capable of doing so many jobs, lifting heavy weights, doing almost every field work, and costing just a fraction of what is invested on a 20 kg lifting drone which cannot even serve for 4 years.
The following results have been found from experiment :
a. Model worked flawlessly over the model field with the help of equations derived, and the designed algorithm also helped to simplify and smoothen the movement of the cable suspended robot, that too in a very cheap and less featured microcontroller with low RAM (Arduino Uno) .
b. With various modifications in equations derived earlier, the model was able to travel in Spiral path, Helical path, Circular path (in vertical and horizontal plane) & Straight line path in 3D of course.
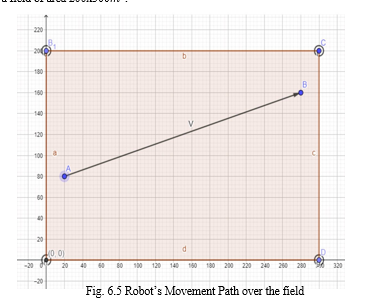
A. Example
Let's take an example of a field of area 200x300m2 .

X. FUTURE SCOPE
FarmPet can prove to be a century changer in the field of agricultural science. As it is clear, this is a very simple, accessible and efficient technology, on this basis we have the freedom of modification and upgrade from it. It provides a flexibility that other functions can also be done in it. Just as various operations can be done by changing the tools of the tractor, as various operations can be done by changing the cutting tool of the lathe machine, in the same way with different types of arrangement of the center robot of FarmPet many different activities can be doneFrom a business point of view also FarmPet is a very golden choice. Available at low cost compared to all other machines available in the market, compatible with renewable energy sources like solar energy, low repair & maintenance cost, with many features like less skill requirement to operate, hardly any other tool can provide the ability to do so many tasks.
Conclusion
Agriculture is one of the most essential and important sectors from the point of view of modern times. The modern equipment available for use today such as drones, sprayers or other additional options are very expensive and difficult to use by low level farmers, the same is the question of their availability. The design of “FarmPet” has been done by keeping these requirements in mind. It is easy to operate, effective and cheap among other available devices. It is a setup made up of very simple mechanics which is easy to operate, effective and cheap among other available devices. According to our research farmpet is effective, efficient & profitable in the field of agriculture in various manners. It can be used for different purposes like, to provide fertilizers like nitrates to the crop, to apply manure to the soil and to provide pesticides as per requirement, with ease and on time just with the help of farmpet. It will be more effective when it is used in large scale fields although it can be used in any field, size of field will not be the barrier. Costing of the arrangement will also depend on the size of the field so it can also be available for farmers who do farming on a smaller scale.
References
[1] Swati D Kale, Swati V Khandagale, Shweta S Gaikwad, Sayali S Narve and Purva V Gangal, \"Agriculture Drone for Spraying Fertilizer and Pesticides\", lijarsse, vol. 5, no. 12, December 2015, Corpus ID: 212537741 [2] Ashish T. Meshram,Anil V. Vanalkar,Kavita B. Kalambe, “Pesticide spraying robot for precision agriculture: A categorical literature review and future trends” First published: 14 October 2021, Journal of Field Robotics, https://doi.org/10.1002/rob.22043 [3] Timo Karvinen,Ermo Keskinen “Dynamics of Wire-Driven Machine Mechanisms: Literature Review” 06 March 2010, Department of Mechanics and DesignTampere University of Technology, Tampere,Finland, DOI: 10.1007/978-1-4419-5754-2_25 [4] Hernandez, Norma Alicia Gonzalez, Mario Erik Torres Gutierrez, Juan Antonio Chavez Murga, and Hussein Maloof Flores. \"Remote controlled electrically independent irrigation system.\" U.S. Patent Application 14/995,287,June 22, 2017. [5] Rahul Honkalas, Bhagyesh Deshmukh and Prabhakar Pawar, “ A Review on Design and Efficiency Improvement of Worm and Worm Wheel of a Gear Motor”, 2021, Conf. Ser. 1969 012023, -Journal of Physics, 10.1088/1742-6596/1969/1/012023 [6] Geng Bai, Yufeng Ge, David Scoby, Bryan Leavitt, Vincent Stoerger, Norbert Kirchgessner, Suat Irmak, George Graef, James Schnable, Tala Awada , “NU-Spidercam: A large-scale, cable-driven, integrated sensing and robotic system for advanced phenotyping, remote sensing, and agronomic”, 07 March 2019, 0168-1699,Computers and Electronics in Agriculture, https://doi.org/10.1016/j.compag.2019.03.009 [7] Md. Matiur Rahaman, Dijun Chen, Zeeshan Gillani, Christian Klukas and Ming Chen ,”Advanced phenotyping and phenotype data analysis for the study of plant growth and development “,27 July 2015, https://doi.org/10.3389/fpls.2015.00619,Frontiers in Plant Science [8] Mathew Newman ,“Design And Experimentation Of Cable-Driven Platform Stabilization And Controls”, Aug 2017, Article https://digitalcommons.unl.edu/mechengdiss/125 [9] Rohit Sharma, Sachin S.Kamble, Angappa Gunasekaran s, Vikas Kumar, Anil Kumar , “A systematic literature review on machine learning applications for sustainable agriculture supply chain performance ”, Vol 19, 24 February 2020, Computers and Operations Research, https://doi.org/10.1016/j.cor.2020.104926 ************
Copyright
Copyright © 2023 Sameerjeet Singh Chhabra, Dr. Shubhrata Nagpal. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET48965
Publish Date : 2023-02-01
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online