

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Manufacturing of 360 Degree Conveyor System with Automated Mechanism
Authors: Shubham Khot, Piyusha Bhoi , Kartik Asabe , Snehal Theng , Prof. P. H. Lokhande
DOI Link: https://doi.org/10.22214/ijraset.2022.40670
Certificate: View Certificate
Abstract
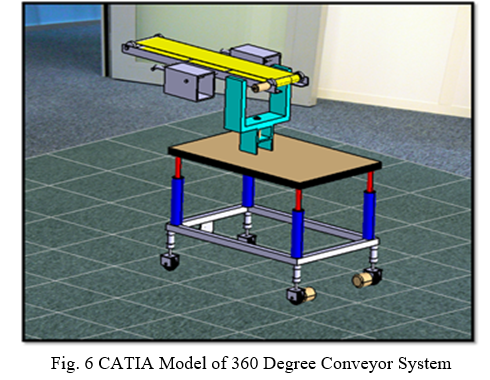
In most of the heavy-duty industries to transfer a material from one point to another, for packaging purpose conveyors are used. They are also used in low and medium industries for the purpose of smooth working of assembly line, as they can transfer produced goods with the same quantitative flow. So, in every industry conveyors are widely used. Nowadays as the arena of production is changing demand for the requirement of new types of special purpose conveyors are increasing. In the era of automation, the conveyor is on the verge of high demand, who can change its orientation according to the requirement of producer. In this project we are developing a 360-degree conveyor who can move in all 3 degrees of freedom. The prototype is designed and developed using CAD software CATIA. Components that are easily available in the market and suitable for developing a 360-degree conveyor system were tested. Different kinds of tests were done on critical parts of the system in order to determine its accuracy, its response time, and the system impact. Finally, the results acquired from these various tests will be discussed. Any findings and changes that should be made are discussed and may be useful for future development.
Introduction
I. INTRODUCTION
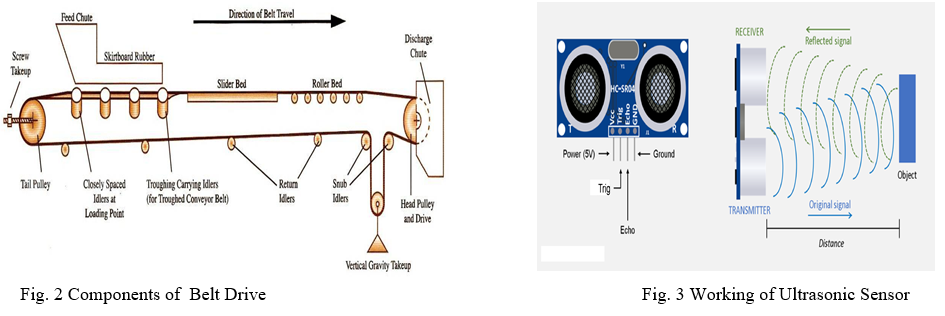
A 360 Degree Conveyor System is a common piece of mechanical handling equipment that moves materials from one location to another. Conveyors are especially useful in applications involving the transportation of heavy or bulky materials. Conveyor systems allow quick and efficient transportation for a wide variety of materials which make them very popular in the material handling and packaging industries. Many kinds of conveying systems are available, and are used according to the various needs of different industries. There are belt conveyor, screw conveyor, chain conveyors as well as telescopic conveyors.
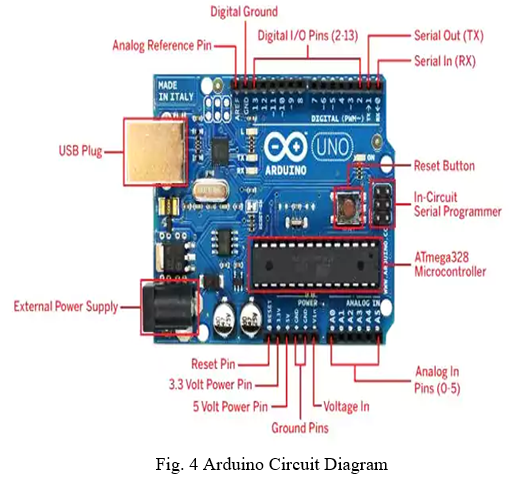
A 360 Degree Conveyor System involves arduino circuits and sensors to varying roller wheel speed and obtain height adjusting according to requirements.
Pneumatic cylinders are used to obtain vertical linear motion which are operated by sensors. Pneumatic cylinders are mechanical devices which use the power of compressed gas to produce a force in a reciprocating linear motion. Like in hydraulic cylinders, something Forces a piston to move in the desired direction. Thus it produces a lift in desired direction. Air is utilized to produce a pneumatic lift to increase the height of the chassis whenever required otherwise it brings the original position to have standard ground clearance by acting as an active conveyor system.
A. Pneumatic Cylinder

Thus using a pneumatic cylinder, the conveyor system can be lifted with ease in operation.
- Power can be easily transmission.
- Less loss in transmission.
- Less Maintenance.
- Low cost.
- Easy to work and reduces the manual stress.
II. PROBLEM STATEMENT
Our project work deal with utilization of 360 conveyor for reduces the Manpower cost, space required for operation so that it becomes compact, time saving and safe loading and unloading the materials in industries. Our current attempt is towards fabricating an economical telescopic material unloaded by adopting the exiting simple design procedure. We are going to develop conveyor which can height adjustable also works on pneumatic cylinder.
III. OBJECTIVE
A. To analyse the performance of traditional conveyors and modify it into conveyor system.
B. Design and develop modified system for extension and retraction in both planes
C. Reduce loading and unloading time as well as human efforts in term of man hours.
D. Develop compact system that consumes minimum storage space and minimum energy.
IV. WORKING PRINCIPLE
This 360 degree conveyor system consist of conveyor belt, 6 motors, lead screw, pneumatic actuators, roller wheels, Arduino circuit, etc. One motor is connected with the shaft of the belt which will rotate the conveyor belt. Two motors and two lead screw actuators will be used for making the up-down mechanism. Two motor are connected with those actuators and when the motor will rotate the actuator will move in the up-down position. One motor is provided in the bottom of the base and the shaft will be connecting to the clamp which is connected with that motor shaft with the help of coupling. So, with the help of this we can rotate the conveyor belt at 360°. So with the help of this 360°rotated conveyor belt the material handling can be done easily.
Four pneumatic actuators will be used at below the system for adjusting height according to applications and pneumatic actuators senses the application by ultrasonic sensor. Two another motors are connected to rear side roller wheels for moving the system from one location to another location & Arduino circuit will be used to perform all these operations.
Pneumatic actuators will be easily disengaged from the system when it will be no needed. Ultrasonic sensor will be used to detect objects and measure distance. Ultrasonic transmitter transmits a ultrasonic sound. When it strike on the object, it gets reflected on the receiver and receiver sends message massage to the controller. According to the application height system adjust their height with application and transport the specimen from one place to another.
Distance = Speed * Time
Above formula is used for to calculate the distance between application and system.
A. Working of Arduino Circuit
The whole 360 degree conveyor system will be operated on arduino circuit. Basically two arduino circuits are present in this system. One is used for to operate belt drive, up-down mechanism and 360 rotation and another used for to operate actuators and roller wheels. The whole system will be operated on Smartphone or Touchpad. In other words, Arduino boards are able to read inputs - light on a sensor, a finger on a button, or a Twitter message - and turn it into an output - activating a motor, turning on an LED, publishing something online. You can tell your board what to do by sending a set of instructions to the microcontroller on the board.
V. LITERATURE REVIEW
- “Stacked Pneumatic Cylinder Automate Conveyor Belt Operations” by Thornton. G and Thomas. J.
This Paper shows how clusters of remotely controlled pneumatic cylinders swing a hinged conveyor belt to 4 preselected vertical positions. Using a manual method to move the conveyor meant that the operator had to use a hand winch, sheaves, drums, and winch cable. There was a need to develop a simple, effective, and remotely controlled system which would perform 2 functions: eliminate the need for stopping the conveyor to reset the hinged belt, and not require the operator to leave the master control console. Using the developed system, the operator need only turn on the appropriate switching valves from the master console. Each pneumatic cylinder is actuated in sequence, on the retraction stroke only, through the elevating positions. To lower the conveyor belt, the head end of each cylinder is exhausted; the weight of the belt extends the cylinders, lowering the belt by gravity. Cylinder exhaust ports in the power valves are fitted with adjustable flow control valves to regulate cylinder speed; common exhaust ports in the interconnected manifolds are fitted with air silencers.
2. “Development of an Automatic Monitoring and Control System for the Object on the Conveyor System” by Siva. S. Vardhan, Shivraj. Y. Narayan.
This paper presents the design, fabrication and validation of an automatic monitoring and control system designed for probing various types of objects on a belt conveyor. This system uses Allen Bradley MicroLogix PLC for controlling and feedback of sensors for monitoring the objects. The production capacity of the system can be set in the program which can be easily altered satisfying the seasonal demand. The system stops automatically after reaching the desired production. In order to validate the designed system, experiments are performed using Taguchi’s methodology wherein parameters like position, orientation, filling time, material type and types of objects i.e. trays and bottles are studied elaborately.
3. “Adjustable Ground Clearance in Vehicles Using Pneumatic Lifting” by Ghanshyam Baghel, Prince Jaiswal, Prashant Dewangan, Abhishek Parsend, Devesh Shrivastava (Asst Prof) Bhilai Institute of Technology, Bhilai House, Durg.
This paper discussed about the handling of vehicle depends upon the various parameters, centre of gravity of the vehicle is one of them. For better handling of the vehicle we need to keep centre of gravity as low as possible. For sport cars it is always kept low but for the passenger cars it compromises with its ground clearance. The designers prefer to maintain fixed ground clearance and design the system to acquire requisite suspension parameters. For different type of tracks, the ground clearance of vehicle is designed accordingly and that is why this is a subtle reason which also differentiates the vehicles as on-road (Sedan/Hatchback cars) and off-road (Sports utility vehicles (SUV)). Off-road vehicles have to face the rough terrain, where we need the high ground clearance of the vehicle, on the other hand we run the same vehicle on a road where high ground clearance is not necessary. Whereas a sedan car or hatchback has to run on smooth roads as well as on rough terrains sometime with its fixed lower ground clearance which tends to create dents on the bottom portion of the car.
4. “Design and Fabrication of 360° Rotating Conveyer Belt with Up-Down Mechanism” by Prof.Patil T. D, Mohan S.D, Borase B. S, Nandan S. R, Raysing H. A.
The papers discussed that most small scale industries use human effort for transporting of raw material from one place to another. Most of industries uses cranes, hoists, small industrial trucks and conveyers which is in fixed position. The 360-degree belt conveyor system is the transport of material from one place to another with a mechanism of rotation and top to bottom movement. This conveyor belt does not require frequent lubrication. The present work deals with the new trend in the field of belt conveyor system. A 360 °rotating belt conveyor system has been designed for prototype and it includes belt width, motor selection, belt specification, shaft diameter, pulley, bearing selection and economies of the rotating belt conveyor system is presented in this work.
VI. DESIGN & CALCULATIOS
For Design Calculations, we are assume 1 Kg weight of component travels from one point to another point on polyester conveyor belt
Specifications of Conveyor Belt System are :
Component on Belt : Set of Books,
Belt Material : Polyester Black Belt,
Load Acting on Belt : 1 Kg,
Selection of Motor : 12 V DC Motors, ……[Refer. DC Motor selection chart]
No. of Motors : 6,
Actuator Type : Pneumatic Actuators,
Weight of Assembly : 4 Kg,
Angle of Inclination of Conveyor Belt : 0 to 45 Degree
A. Design of Motor Connected to the Base
Considering the total weight of the assembly 4+1= 5 Kg The required rpm at upper part is near about 10 rpm. So we selected the motor with 10rpm speed. Let the torque on one side of the arm = Tb , Nm
We require 10 rpm motor.
Tb = m*g x L
Tb = 2*9.81 x 300 x 10-3 = 5.886 N-m
P = 2πNT/60
P = (2π*10*5.886)/60
P = 6.16 W
10 rpm D.C. motor is available in the market for 5 kg torque. So we have selected this standard motor.
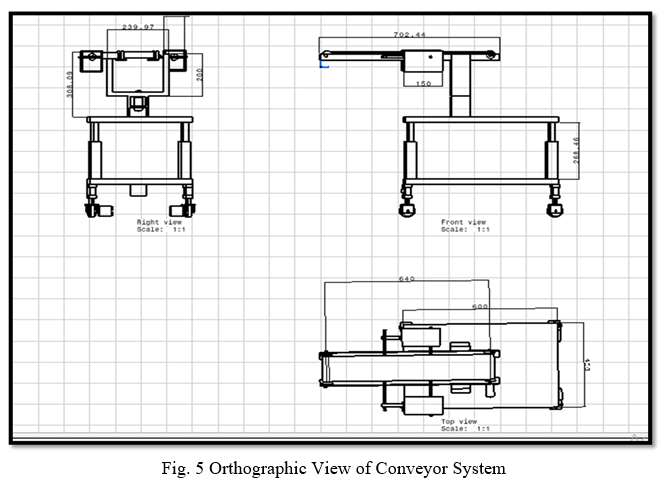
B. Dimensions of Channel Plate
Material for the channel plate is Aluminum. Length of channel plate Channel plate is used to support the conveyor belt, therefor we select the length of channel plate more than conveyed length.
Conveyed length is = 1400/2 = 700;
L = 640mm
Width of channel plate considered more than the diameter of roller. Roller diameter= 34mm So, we select the width of 50 mm We required such two plate
Length- 640 mm
Width - 30 mm
T = F x l, T = mg x l= 1* 9.81*640= 6278.4 N.mm
T= 6278.4 x 10^-3 = 6.2784 N.m
M/I = σ/Y
(6.2784*10^3)/((30*t^3)/12) = 240/(t/2)
t = 2.29 mm
But in market minimum size available is 3 mm.
t = 3 mm
l = 640 mm
w = 30 mm
C. Design of weld joint
Checking the strength of the welded joints for the safety. The transverse fillet weld welds the side plate and stiffness plates, the maximum load which the plate can carry for transverse fillet weld is given by a formula below:
P = 0.707 x S x L x fs
Where,
S = size of weld
L= contact length = 28mm
The load of shear along with the friction is 36kg = 360N
Putting values in given equation:
360 = 0.707 x 3.8 x 28 x fs
fs = 4.78 N/mm 2
Since the above calculated are smaller so permissible value fs is taken as 20 N /mm2 which is very safe.
Example
The material used for the cylinder is aluminium, which is having specification of 50 diameter, 100mm in length and permissible load (ft.) 180N/mm2. We have selected 50mm diameter cylinder to get proper force intended on can and it get crushed, here is the calculation carried out: -
Given Data: D= 50mm, L= 100mm, Pressure (P) = 2 bar, t= 3mm
Outer Diameter of Cylinder,
D 0 = D i + 2(t)
= 50 +2 x (3)
= 56mm
D 0 = 56mm
F= Load*Area
F= P x A
F= 2 x π/4*(50) 2
F= 2 x 1964.48
F= 3927.99 N/m 2
Convert it into Kg
F= 3927.99 /9.8
F= 400.81 Kg
D. Proposed Outcomes of 360 Degree Conveyor System
- We get suitable ground clearance by adjusting height of the system with help of pneumatic actuators.
- This conveyor system needed minimum storage space and also we can separate the pneumatic cylinder from system to keep system in a fixed position.
- This system reduces loading and unloading time, less man effort needed and also give better performance than the traditional conveyors.
- Semi-skilled can be operated this conveyor system.
VII. ADVANTAGES
A. Less cost as compared to fixed conveyor system.
B. Semi-Skilled labor can be operated this system.
C. The whole system can be easily operated automatically.
D. Less man power will be needed.
E. Much simpler to maintain and don’t require any major lubrication system like chain conveyors.
F. Highly reliable as compare to other belt conveyor.
VIII. APPLICATIONS
A. Used in automobile industries.
B. Used in agriculture sector.
C. Used in chemical factories.
D. Used in scrap industry.
E. Used in aerospace industry.
F. Used in coal industry.
IX. ACKOKNOLEDGEMENT
We are pleased to recognize Professor P. H. Lokhande for his invaluable guidance during the course of this project work. Further we are also thankful for the support extended by the Management, Professor J. L. Minase, Coordinator, Sinhgad College of Engineering and Dr.A.P. Pandhare, Head of Department of Mechanical Engineering, Sinhgad College of Engineering, Pune.
Conclusion
The 360 degree conveyor system for material handling has all abundant and outstanding advantage of this equipment in any material handling industry with minimum knowledge about the operation of equipment is very limited time. So in all matter it is the better than fixed conveyor belt. Thus a \"360° rotating conveyor belt with up-down mechanism with automated mechanism\" is designed and prototype model is fabricated using D.C motors, Arduino circuit, pneumatic actuators and remaining parts with in low cost.
References
[1] MeshramPradnyaratna A, Dr. SahuA R, “Design, Modelling and Analysis of conveyor system used for transportation of Cartons”, International Journal of Research in Advent Technology, Vol.4, No.1, E-ISSN: 2321-9637. January 2016. [2] Aniket. A. Jagtap et al “Design of Material Handling Equipment: Belt Conveyor System for Crushed Biomass Wood Using V Merge Conveying System” Ijmerr Vol. 4, No. 2, Issn 2278 – 0149, April 2015. [3] Mr. Rajratna A. Bhalerao1, Dr. R.J. Patil2 “Transient And Mode Shape Analysis Of Gravity Roller Conveyor For Weight Reduction” Ijiset - International Journal Of Innovative Science, Engineering & Technology, Vol. 1 Issue 5, July 2014. Issn 2348 – 7968. [4] Pawer Jyotsna, 2d.D.Date, 3pratik Satav“Design And Optimization Of Roller In Belt Conveyor System For Weight Reduction”Irf International Conference, 01st June-2014, Pune, India, Isbn: 978-93-84209-23-0 [5] G.Velmurugan, Dr.E.Palaniswamy, M.Sambathkumar “Conveyor Belt Troubles (Bulk Material Handling)” International Journal of Emerging Engineering Research and technology, Volume 2, Issue 3, PP 21-30, June 2014 [6] D. Nannaware D.K. and Kharde R.R, “Design and Optimization of Roller Conveyor System”, International Journal of Scientific & Engineering Research, July2014, Volume 5, Issue 7, pp. 1254-1258. [7] Mr. Memane Vijay S., Prof. N.S.Biradar ?Design And Analysis Of Belt Conveyor System Of Sugar Industry For Weight Reduction‘ May 2015, Volume 2, Issue 5 Jetir (Issn-2349-5162) [8] Konakalla Naga Sri Ananth, Vaitla Rakesh,Pothamsetty Kasi Visweswarao Design And Selecting The Proper Conveyor-Belt‘E-Issn 0976-3945
Copyright
Copyright © 2022 Shubham Khot, Piyusha Bhoi , Kartik Asabe , Snehal Theng . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET40670
Publish Date : 2022-03-07
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online