

Ijraset Journal For Research in Applied Science and Engineering Technology
Design of a Human Detection Robot during Disaster
Authors: Dr. Shyamala C, Ananya S, Anitha K M, Ankitha M, Janhavi H
DOI Link: https://doi.org/10.22214/ijraset.2023.52416
Certificate: View Certificate
Abstract
Disasters can disrupt economic and social balance of the society. Many people die while trapped under debris during natural disasters or manmade disasters. This is because their presence was not able to detect by the rescue team as many challenges arises in the disaster area. After any disaster, it is crucial to rescue defectors. Sometimes the rescue team cannot reach many parts of disaster affected area due to the inability to search for the live person in the debris. In order to detect a human body, a robot is equipped with a specific set of sensors that provide information about the presence of a person in the disaster areas. Passive Infrared Sensors (PIR) are the most widely used sensors for surveillance, it detects the alive person who is stuck in the damage caused by disaster. The temperature sensor analyses the temperature around the disaster area. Fire sensor alerts the system if there is any fire accident around the damaged area. Gas sensors alerts the system user so that they can take necessary protocol before rescuing someone. A wireless camera that can transmit live video in low light conditions to the rescue team outside the vicinity. When a human is detected, to get the location of the victim GPS and GSM module is used.
Introduction
I. INTRODUCTION
Now a day, Natural disaster like flood, earthquake and cyclone keep happening frequently because people are disrupting the natural balance by cutting trees, destroying hills and unplanned urbanization. During catastrophes, many people lose their life and property. After any disaster, it is crucial to rescue defectors. Police, fire service and paramedics are being deployed to minimize the loss of life and property. Sometimes the rescue team cannot reach many parts of disaster affected area due to the inability to search for the live person in the debris. In some situation, they themselves became the victim of the situation. To reduce losses of lives and for getting accurate information of the situation, a robotic system can be used and can be modified according to the needs of the situations. Developing a prototype of a robot using an Arduino uno and few sensors including PIR sensor, gas sensor etc, that it can detect human trapped under debris. The Robot consists of a four-wheel geared drive with dc motors attached to perform movement. The Robot can also send live images to the rescue team so that it helps to find the location of victims. Once a human is detected the software sends the message to the robot, the RF modem inside the robot receives the message and further process of acquiring the GPS location and notifying the relevant people using a GSM module is done using the help of the Arduino. Use of wireless sensor network will improve the savings of many lives. This robotic model is highly helpful for rescue operations and for military purpose. In critical situations, rather than sending human task force the robot can be sent to search and investigate the affected perimeter and give back location information via GPS and visual data via live feed on the wireless camera.
II. LITERATURE SURVEY
- K. M. Anand Vijay, S. Purustut, R. Suhas, C. Pavan and P. Pradhan, proposed "A Live Human Being Detector in War Fields and Earthquake Location Using Robot with Camouflage Technology," 2018 3rd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), 2018.-The paper proposes a system for detecting live human beings in war zones and earthquake-affected areas using a robot equipped with camouflage technology. The system employs image processing techniques to detect human presence and sends the information back to the control station. The proposed system aims to reduce the risk of casualties by identifying live human beings in dangerous situations. The paper also discusses the challenges faced in designing such a system and the potential benefits of using robots with camouflage technology for rescue and recovery operations. Overall, the paper presents a novel approach for detecting human presence in hazardous environments, which has the potential to save lives and reduce the risk of injury.
- J. Andrews, M. Kowsika, A. Vakil and J. Li, proposed "A Motion Induced Passive Infrared (PIR) Sensor for Stationary Human Occupancy Detection," 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), 2020.-The paper proposes a low-cost, low-power motion-induced PIR sensor for detecting stationary human occupancy. The sensor uses a microcontroller and PIR sensor to detect changes in infrared radiation emitted by the human body. It is suitable for use in smart homes, security systems, and occupancy-based energy management. The paper describes the design, implementation, and experimental results of the sensor, demonstrating its effectiveness in detecting human presence.
- F. K. Chuah and S. S. Teoh, proposed "Thermal Sensor based Human Presence Detection for Smart Home Application," 2020 10th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), 2020.-The paper proposes a thermal sensor-based system for human presence detection in smart homes. The system uses a thermal sensor to detect human presence based on the changes in temperature caused by the human body. The proposed system is designed to be low-cost and energy-efficient, making it suitable for smart home applications. The paper describes the design and implementation of the system, as well as the experimental results, demonstrating its effectiveness in detecting human presence. Overall, this paper presents a novel approach to human presence detection in smart homes using thermal sensors, which has the potential to improve energy efficiency and security.
- D. K. S. Nadiger, B. V. Santhosh Krishna, P. Piruthiviraj, K. Vinay Kumar, B. N. Hirebidari and Vignesh, in [4] proposed "IoT Based Alive Human Detection in War Field and Calamity Area Using Microcontroller, " 2022 Second International Conference on Artificial Intelligence and Smart Energy (ICAIS), 2022.-The paper proposes an IoT-based system for detecting live human beings in war zones and disaster-affected areas using a microcontroller and sensors such as PIR and ultrasonic sensors. The system sends the information to the control center using an IoT platform. The paper describes the design, implementation, and experimental results of the system, demonstrating its effectiveness in detecting human presence. Overall, this paper presents a novel approach to human presence detection in hazardous environments using IoT technology and microcontrollers.
- N. K. Sabat, U. C. Pati, B. R. Senapati and S. K. Das, in proposed "An IoT Concept for Region Based Human Detection Using PIR Sensors and FRED Cloud," 2019 IEEE 1st International Conference on Energy, Systems and Information Processing (ICESIP), 2019.-The paper proposes an IoT-based system for human detection using PIR sensors and FRED cloud to improve safety and security in public places. The system detects human presence in a specific region using PIR sensors and sends the information to the cloud. The paper describes the design, implementation, and experimental results of the system, demonstrating its effectiveness in detecting human presence. Overall, this paper presents a novel approach to human detection using IoT technology and cloud platforms.
- Z. Uddin and M. Islam, proposed "Search and rescue system for alive human detection by semi-autonomous mobile rescue robot," 2016 International Conference on Innovations in Science, Engineering and Technology (ICISET), 2016.-The paper proposes a search and rescue system that uses a semi-autonomous mobile rescue robot equipped with sensors to detect live human beings in disaster-affected areas. The system aims to improve rescue operations, and the paper demonstrates its effectiveness in detecting human presence. Overall, this paper presents a novel approach to search and rescue operations using mobile rescue robots.
- J.Andrews, A. Vakil and J. Li, in [7] proposed "Biometric Authentication and Stationary Detection of Human Subjects by Deep Learning of Passive Infrared (PIR) Sensor Data," 2020 IEEE Signal Processing in Medicine and Biology Symposium (SPMB), 2020.-The paper proposes a biometric authentication and detection system using PIR sensors and deep learning techniques to enhance security and privacy in residential and commercial areas. The system detects the presence of human subjects and authenticates individuals based on their unique biometric signatures. The paper demonstrates the effectiveness of the system and presents a novel approach to biometric authentication and detection.
- B. Yang, F. Liu, L. Yuan and Y. Zhang, in [8] proposed "6LoWPAN Protocol Based Infrared Sensor Network Human Target Locating System," 2020 15th IEEE Conference on Industrial Electronics and Applications (ICIEA), 2020.-The paper proposes a human target locating system using 6LoWPAN protocol based infrared sensor network. The system aims to locate human targets in indoor environments using a network of infrared sensors. The paper presents the design, implementation, and experimental results of the system, demonstrating its effectiveness in locating human targets. Overall, this paper presents a novel approach to human target locating using 6LoWPAN protocol and infrared sensor network.
- A. Maurya, M. Sonkusare, A. Raut, D. Tamhane and D. Palase,in [9] proposed "Surveillance Robot with Human Detection," 2018 Second International Conference on Inventive Communication and Computational Technologies (ICICCT), 2018.-The paper proposes a surveillance robot with human detection capability. The robot uses various sensors such as PIR, ultrasonic, and image sensors to detect the presence of human beings and provide real-time surveillance. The paper describes the design, implementation, and experimental results of the robot, demonstrating its effectiveness in detecting human presence. Overall, this paper presents a novel approach to surveillance using a robot with human detection capability.
- K. C. Sahoo and U. C. Pati, in [10] proposed "IoT based intrusion detection system using PIR sensor," 2017 2nd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), 2017.-
The paper proposes an IoT-based intrusion detection system using PIR sensors. The system aims to detect intruders in indoor environments using PIR sensors and send alerts to the user's smartphone. The paper describes the design, implementation, and experimental results of the system, demonstrating its effectiveness in detecting intruders. Overall, this paper presents a novel approach to intrusion detection using IoT and PIR sensors.
III. PROPOSED METHODOLOGY
The rescue robot is carried to the disaster area and connected. The batteries must be completely charged before the operation. A wireless camera that can transmit live video in low light conditions to the rescue team outside the vicinity, is mounted onto the robot. Camera must be synchronized with cell-phone or PC over wi-fi. Then the robot is powered on and the motor gets activated, which in turn causes the wheels to move. The robot can be controlled using a PC or a remote control, which helps in reliable controlling of robot. The robot is then moved to the vicinity to search for casualties or humans.
Whenever humans are detected within the PIR sensor range and LED glows and all these happen simultaneously. If the LED is ON that means a human casualty is around. The robot stops when the human is detected and moves backward for 10 seconds. PIR sensors can detect humans within the range of 10 meters i.e., 30 feet. Once a human is detected sensors sends the message to the robot and further process of acquiring the GPS location and notifying the relevant people is done using the help of NodeMCU processor. In case, if there is any fire or leakage of LPG the Fire and Gas sensors respectively detect this and a signal is sent to the rescue team, where a message is displayed on the PC or cellphone via blynk app. The disaster management team makes a consideration plan and enters the calamity area to rescue the victims.
IV. BLOCK DIAGRAM
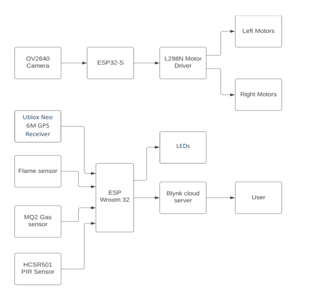
The above Fig. shows the block diagram of human detection robot for disaster area. The robot has ESP Wroom 32 as the main controller which has Wi-Fi capability. Flame sensor, MQ2 Gas sensor and HCSR501 PIR sensor are all connected to the controller. when sensors detect fire, LPG gas or human then the LEDs connected to the respective sensors will glow which can be seen through the connected ESP32 camera module. The User gets the information about the disaster area from the blynk cloud server which gets the information from sensors through microcontroller. The camera module is also useful to navigate the robot in disaster area since the robot is remote controlled.
Conclusion
This system will be a great help indeed to rescuers in detection of the human beings at the disaster sites. This is also user friendly, economical, semi-autonomous, and efficient device for detection of humans. This proposed model system will be a combination of a stationary and a mobile robot system especially for the disaster affected chaotic areas. The robot can move in all directions by both PC and remote control and also automatically, which makes the system more effective to use. As the robot can move, it covers lot of distance that reduces the use of many robots or sensors. When the robot finds a human, it can notify the users by sending notification to the rescue team.
References
[1] K. Marapalli, A. Bansode, P. Dundgekar and N. Rathod, “AIGER An Intelligent Vehicle for Military Purpose,” 2021 7th International Conference on Advanced Computing and Communication Systems (ICACCS), 2021, pp. 1052-1057, doi:10.1109/ICACCS51430.2021.9441998. [2] T. Akilan, S. Chaudhary, P. Kumari and U. Pandey, “Surveillance Robot in Hazardous Place Using IoT Technology,” 2020 2nd International Conference on Advances in Computing, Communication Control and Networking (ICACCCN), 2020, pp. 775-780, doi: 10.1109/ICACCCN51052.2020.9362813. [3] J. Xiao et al., “Design of Ultrasonic Radar Detection System,” 2021 IEEE 15th International Conference on Electronic Measurement & Instruments (ICEMI), 2021, pp. 471-475, doi: 10.1109/ICEMI52946.2021.9679522. [4] Pratibha, R. Rajput, A. Yadav, A. S. Ansari, M. A. Husain and S. P. Singh, “Designing of Automatic Corridor Lighting System Using PIR Motion Sensor,” 2021 International Conference on Control, Automation, Power and Signal Processing (CAPS), 2021, pp. 1-6, doi: 10.1109/CAPS52117.2021.9730730. [5] A. Ramkumar, T. Karthick, C. V. Kumar, S. Rajendran and K. Rajesh, “Design and Development of E-Vehicle with Phone Control,” 2021 Second International Conference on Electronics and Sustainable Communication Systems (ICESC), 2021, pp. 320-323, doi: 10.1109/ICESC51422.2021.9532622. [6] D. K. S. Nadiger, B. V. Santhosh Krishna, P. Piruthiviraj, K. Vinay Kumar, B. N. Hirebidari and Vignesh, \"IoT Based Alive Human Detection in War Field and Calamity Area Using Microcontroller, \" 2022 Second International Conference on Artificial Intelligence and Smart Energy (ICAIS), 2022, pp. 1233-1238, doi: 10.1109/ICAIS53314.2022.9742741. [7] N. K. Sabat, U. C. Pati, B. R. Senapati and S. K. Das, \"An IoT Concept for Region Based Human Detection Using PIR Sensors and FRED Cloud,\" 2019 IEEE 1st International Conference on Energy, Systems and Information Processing (ICESIP), 2019, pp. 1-4, doi: 10.1109/ICESIP46348.2019.8938286. [8] O. Urfaliglu, E. B. Soyer, B. U. Toreyin and A. E. Cetin, \"PIR-sensor based human motion event classification,\" 2008 IEEE 16th Signal Processing, Communication and Applications Conference, 2008, pp. 1-4, doi: 10.1109/SIU.2008.4632611. [9] Z. Uddin and M. Islam, \"Search and rescue system for alive human detection by semi-autonomous mobile rescue robot,\" 2016 International Conference on Innovations in Science, Engineering and Technology (ICISET), 2016, pp. 1-5, doi: 10.1109/ICISET.2016.7856489. [10] K. M. Anand Vijay, S. Purustut, R. Suhas, C. Pavan and P. Pradhan, \"A Live Human Being Detector in War Fields and Earthquake Location Using Robot with Camouflage Technology,\" 2018 3rd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), 2018, pp. 2244-2249, doi: 10.1109/RTEICT42901.2018.9012601. [11] Higor A.F. Camporez, Yasmin S. Pimassoni, Wesley S. Costa, “Remote control in Smartphone-based visible light communications”, 2021 Third South American Colloquium on Visible Light Communications (SACVLC). [12] Krishnakumar marapalli, Pooja dundgekar\"AIGER An Intelligent Vehicle for Military Purpose\"2021 7th International Conference on Advanced Computing and Communication Systems (ICACCS). [13] Aaron Brandonic Andrew, Suraj A Rajiv \"Implementation of Low-Cost Voice Command Robot Using Arduino Uno Platform\"2021 IEEE 7th International Conference on Smart Instrumentation, Measurement and Applications (ICSIMA). [14] Ferryansa, Avin Budiyon \"Analysis of USB Based Spying Method Using Arduino and Metasploit Framework in Windows Operating System\"2020 3rd International Conference on Computer and Informatics Engineering (IC2IE).
Copyright
Copyright © 2023 Dr. Shyamala C, Ananya S, Anitha K M, Ankitha M, Janhavi H. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET52416
Publish Date : 2023-05-17
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online