

Ijraset Journal For Research in Applied Science and Engineering Technology
Design of Hexacopter Tethered Drone
Authors: S. Karthik, N Nawaz Basha, V. Ajith
DOI Link: https://doi.org/10.22214/ijraset.2023.48629
Certificate: View Certificate
Abstract
This paper proposed the development of an tethered Drone to be used for application. Drones become essential for various application. The main drawback of the drones is that the time of flight is very less (around 20 minutes).The proposed system aims to provide continuous power supply to the drone by using power supply from ground. The twisting and tangling of wires is another problem, so we have provided a slip ring mechanism to avoid twisting of cable. In this system author used IMU 6DOF (3-axis accelerometer& 3-axis gyroscope) which ensure it smooth movement, graceful motion and trajectory tracing. GPS system and barometric sensor makes it more efficient in autonomous mode. UAVs have limited operational autonomy, determined by their on-board available power. An autonomous power tethered UAV-UGV team couples those two classes through a power linkage. This serves to increase the UAV’s autonomy in terms of flight time, while concurrently the aerial platform’s utility as an eye-in-the-sky can provide the UGV with increased knowledge of its surroundings. Finally, this physical constraint can grant additional benefits at aerial vehicle control level, especially under the potential presence of strong wind gusts. The developed autonomous operation strategy is examined within a simulated scenario with limited prior map knowledge, which includes a number of unmapped challenges.
Introduction
I. INTRODUCTION
At present world drone technology is extremely acquainted & versatile technology. Drone will drift in air. We will conjointly use wireless camera with it. So we will use it to try and do differing types of tasks. Nowadays Drones are used in long mile wars as a weapon and also as a helper of fighter in the war. Drone are used by scientist as a part of their research assistant. Drones not only help us in society but also a threat for us, as because many of developed countries use it as their weapon of destruction. So drones have their ability to predetermined work so that it becomes important in today’s world. At past drones was used only by military in their war. But day by day it is now used in various household works as it operation and control become easy day by day. Developed world and also developing world use it for their own purposes. Uses of drone are rapidly increased for both public & Private sector. Peoples of Canada & North America now use drone as their assistant of housework & office work. At present not only in Canada but also in others countries drone technology increasing day by day. For the domestic user they have to pay attention on government rules regarding use of drone. For this propose small & cost effectives drones are available in markets. Its popularity increased day by day. So for this issue many governments declared some rules and regulation to fly drone in different purposes. A mature quad rotor system can use for educational and experimental porpoise. Photo shoot for films & drama are also use drone.
II. PROPOSED DESIGN
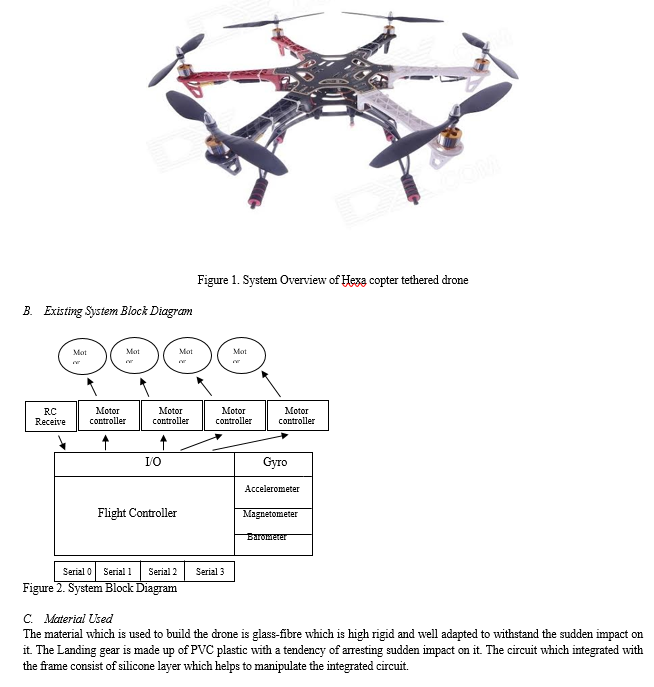
A. System Overview
To design a stable multi copter we need maintain some physics, mathematics and aerodynamic term. Aerodynamic help to define its movement and inertial motion. In the other hand mathematical calculation helps to manipulate required lift force, angular position, graceful motion and trajectory definition. We designed drone’s body according with dynamics and also designed artificial algorithm to make it autonomous and well behaved. Hardwire system consists of different sensors, powerful controller unit and electronic equipments so on. For a desire movement controller takes data from different sensors. 3-axis accelerometer and 3-axis gyroscope provide data of itsorientation, acceleration and angular rate. Then these data processed and compare with reference and desire value. This operation performs with the help of PID loop. Several PID loops used in these case like pitch control, roll control, yaw control, hover, altitude holding and orientation control. IMU (inertial measurement unit) provides real altitude, angular movement and orientation. After that required pulse sends to ESC (Electronic Speed Controller) for desire speed of rotation. Magnetometer provides real time direction with the global magnetic field reference. Barometric pressure sensor also provides real time altitude. GPS (global position system) module helps to make system autonomy. It helps find out any coordinate and reach to this coordinate. Telemetry kit helps to observe flight data wirelessly from ground station. It also send mission file and communicate with air part like USB serial mode (TTL mode).
In ground part consists of powerful ground station. PC/Laptop used for sending data through telemetry and coding or data logging from air part. Another radio transmitter used to switch different mode and operate in manual mode.
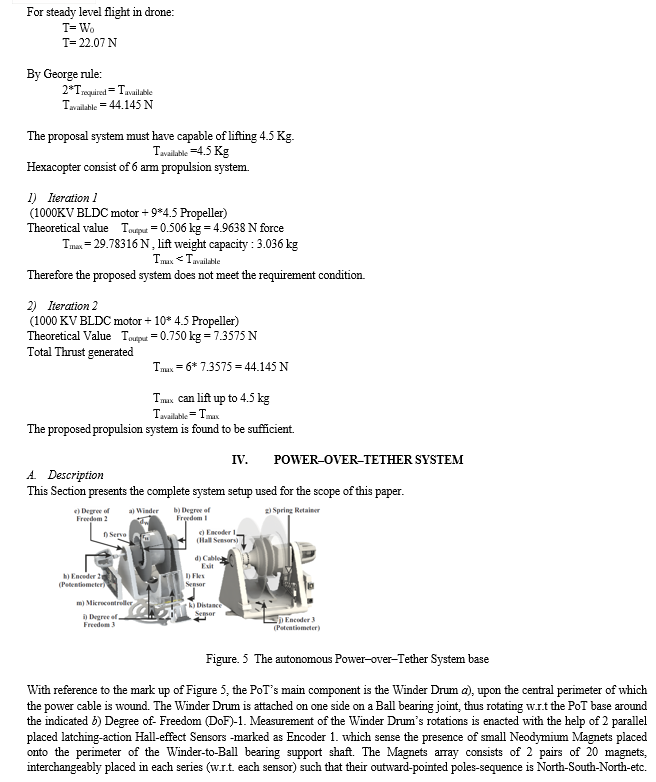
Moreover, the 2 series of the array are radically spaced in-between each others’ empty spaces, such that the Hall-effect Sensors can encode the direction of rotation. Also, it is noted that the cable is inserted into the Winder Drum at a hole, and exits from the support shaft at location d). As can be observed, Cable Exit d) supports the cable’s two phases in parallel placement, hence any twisting occurs from d) and up to the external power source. Mapping between the Free Cable Length L and the Winder Drum absolute turns ??can be estimated given the dimensioning of the respective elements; however, for a total cable length of 8 m and the Winder dimensioning in this implementation, it can be approximated via 2-nd order polynomial fitting of experimentally-derived values, yielding a relation:
L ?Lpol = aL?2+ bL??+ cL (1)
In the proposed implementation, there is an additional Degree-of-Freedom -marked as DoF-2 in e) -, which exists due to the fact that the f ) Servo’s shaft can rotate w.r.t. its body, which is attached onto a Ball bearing joint in e). For a locked servo shaft, DoF-1 and 2 rotate coincidentally, otherwise relative rotation is possible. The Servo is also attached onto the rigid Pot base body via a Retainer-Spring g). This allows DoF-2 to rotate, but more importantly it returns the Servo and DoF-2 back to an original rotation, when the Spring contracts (following elongation which is caused by an externally applied pulling force. The Rotary Encoder 2 in h), implemented with a potentiometer measures the absolute deviation of DoF-2 from its original rotation (at zero Spring elongation), and is used to estimate the Spring’s elongation. Additionally to the Retainer-Spring g), the servo rotation is limited up to an approximate maximum of 60 deg via a non-elastic retainer. This prohibits any non-elastic (catastrophic) elongation of the Spring, but more importantly it allows “locking” of DoF-2 and enables passing the full torque of the Servo onto the Winder DoF-1 (as no additional elongation of the Spring is possible). The aforementioned implementation aims to achieve local “sensing” of the UAV’s tendency to distance itself from the Pot base, or backtrack towards it: when the aerial vehicle moves away it pulls against the cable, and the mechanical tension force is transferred via the Winder Drum onto DoF-2, effectively elongating the Retainer-Spring. When the opposite manoeuvre happens, mechanical tension is decreased and the Spring is compressed accordingly. This principle is used to achieve force-feedback estimation and control the PoT system via the actuation principle granted by the Servo; the specific control synthesis is elaborated in Section III. The PoT base can also rotate w.r.t. to the World-frame X, as marked by DoF-3 in i). A Ball bearing joint and a fixed-base shaft guarantee minimal friction, while the absolute Rotary Encoder 3 j) -also a potentiometer- yields the respective measurements. It is noted that due to the potentiometer the rotation range of DoF-3 is constrained in [−120, 120] deg. A short-range infrared distance sensor marked as k) is used to measure the height of the cable at the exit point of the PoT base. It is placed at a low point to allow certain vertical distance from the cable exit, as its measurements are unreliable below a threshold of ?0.040 m. The functionality of this implementation is further discussed in Section III. An additional component of crucial operating significance is the Flex Sensor marked as l), properly placed at the PoT base ground-to-air cable exit at a height which is marginally higher than the reliability threshold of the Distance Sensor k). This serves to detect cable contact which occurs before the too-short range limit of the Distance Sensor, which might also signify that due to excessive slacking, part of the cable is in contact with (has fallen onto) the ground. This is a particularly undesired occasion which can cause operational problems, as will be discussed in Section III. Finally, an onboard Microcontroller m), the DF-Robot Mega2560 specifically, is attached onto the PoT base. This handles the acquisition of measurements from the onboard sensors, the estimation of all necessary values, and the computation of the necessary control actions. It is also responsible for the generation of the low-level control signals which are required to drive the Servo actuator. It is additionally noted that a Qt-based Graphic User Interface tool has been developed in order to visually display the PoT’s operating values -acquired from the Microcontroller’s serial port- and to override its autonomous control process in real-time operation, and to log all necessary operational values for post-processing.
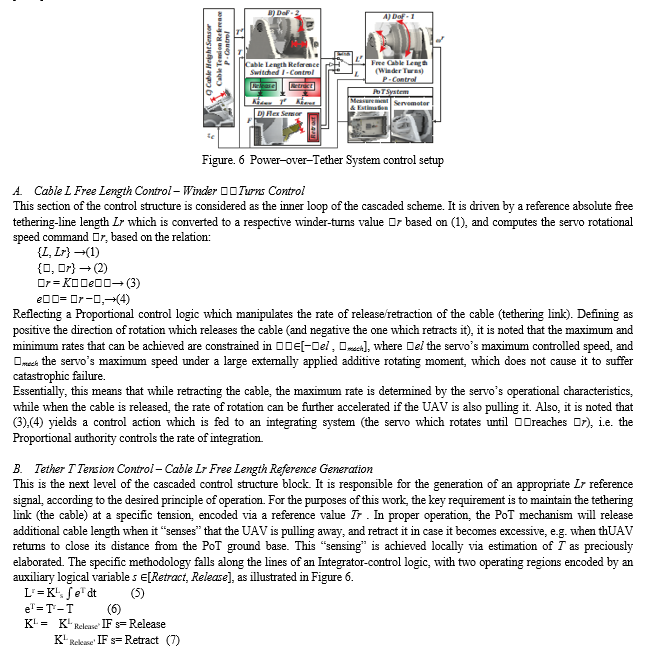
V. POWER–OVER–TETHER SYSTEM CONTROL
As previously described, in order to maintain operational safety, it is important for the PoT system to be capable of functioning autonomously. The capacity to “sense” the UAV’s tendency to move at a greater distance or to backtrack, as well as the approximate estimation of their relative position vector orientation -assuming no physical interaction occurs between the PoT ground base and the vehicle in the air-, is achieved locally, as described within Section II-A. Let the PoT locally measured values be defined as: a) ? is the number of rotations of the winder, which is directly measurable by the hall-effect sensor array. b) L is the tethering line (free cable) length, starting from the winder drum and ending at the UAV, which is estimated as described in Section III-A. c) T is the tension force on the cable, transferred to the outer radius of the winder and estimated via the measurement of the retainer spring’s elongation according to Hooke’s law. It is noted that a “soft” sensitive spring is used in order to acquire small deviations via a simple measuring device (a rotary potentiometer at DoF-2). d) ??marks the servo’s rotational speed (i.e. rotations/sec).
The continuous rotation servo acts as a slow-rotating DC motor, and is used to control DoF-1 by modifying ??according to a free cable length reference Lr , and thus releasing/retracting the cable. It assumed that ?r ??, i.e. the commanded rotational speed is the actual one (where the r superscript marks the reference value). e) zc is the cable suspension height as measured by the distance sensor, w.r.t. the winder drum’s outer perimeter height. f) F is the flex sensor state. This is treated as a Boolean value, i.e. either there exists physical contact of the cable and the sensor, or not. Finally, g) ??PoT is the orientation of the PoT Frame w.r.t. World-frame X as measured by the DoF-3 rotary encoder.
The PoT control synthesis follows the cascaded control structure paradigm, as illustrated in Figure 6. The employed control principles are as follows:
This tower would be in stages which will expanded to the required height suitable for the zone of flight. Thus it can be easily move from one stop to other.
Conclusion
A Power-over-Tether system for remote powering of small-scale Unmanned Aerial Vehicles was proposed. The system was designed and implemented at the device level, with all components elaborated and presented w.r.t. their operating principles. The necessary control synthesis, in order to achieve the required level of communication-independent functionality, was presented and thoroughly analyzed. Together with a high-end hexa rotor platform, the operational capacity of the PoT system was evaluated in a set of experimental evaluation studies. The demonstrating the proposed system’s potential for use within realistic applications.
References
[1] Papachristos, K. Alexis, and A. Tzes, “Technical activities execution with a tiltrotor uas employing explicit model predictive control,” in International Federation of Automatic Control, Proceedings of the 19th IFAC World Congress, Cape Town, South Africa, 2014, p. to appear. [2] K. Alexis, C. Huerzeler, and R. Siegwart, “Hybrid modeling and control of a coaxial unmanned rotorcraft interacting with its environment through contact,” in 2013 International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 2013, pp. 5397–5404. [3] C. Papachristos, K. Alexis, and A. Tzes, “Efficient force exertion for aerial robotic manipulation: Exploiting the thrust-vectoring authority of a tri-tiltrotor uav,” in 2014 International Conference on Robotics and Automation, Hong Kong, China, 2014, p. to appear. [4] L. Cantelli, M. Presti, M. Mangiameli, C. Melita, and G. G. Muscato, “Autonomous cooperation between uav and ugv to improve navigation and environmental monitoring in rough environments,” in Proceedings 10th International symposium HUDEM,(ISSN 1848-9206), 2013, pp. 109–112. [5] G. Tanner, “Switched uav-ugv cooperation scheme for target detection,” in Robotics and Automation, 2007 IEEE International Conference on. IEEE, 2007, pp. 3457–3462. [6] “A marsupial surface-aerial robotic team for riverine environmental monitoring (riverwatch).” [Online]. Available: http://riverwatchws.cloudapp.net/ [7] S. Lupashin and R. D’Andrea, “Stabilization of a flying vehicle on a taut tether using inertial sensing,” in Intelligent Robots and Systems (IROS), 2013 IEEE/RSJ International Conference on, Nov 2013, pp. 2432–2438. [8] S. Karaman and E. Frazzoli, “Incremental sampling-based algorithms for optimal motion planning,” arXiv preprint arXiv:1005.0416, 2010. [9] C. Papachristos, K. Alexis and A. Tzes, ”Technical Activities Execution with a TiltRotor UAS employing Explicit Model Predictive Control,” in Proceedings of the 19th IFAC World Congress of the International Federation of Automatic Control, 2014. [10] C. Papachristos, K. Alexis and A. Tzes, ”Efficient force exertion for aerial robotic manipulation: Exploiting the thrust-vectoring authority of a tri-tiltrotor UAV,” in IEEE International Conference on Robotics and Automation (ICRA), 2014. [11] L. A. Sandino, M. Bejar, K. Kondak, and A. Ollero, ”Advances in modeling and control of tethered unmanned helicopters to enhance hovering performance,” Journal of Intelligent & Robotic Systems, vol. 73, no. 1–4, pp. 3–18, 2014.
Copyright
Copyright © 2023 S. Karthik, N Nawaz Basha, V. Ajith. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET48629
Publish Date : 2023-01-11
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online