

Ijraset Journal For Research in Applied Science and Engineering Technology
Design of MPPT Controllers for PV Cells using Matlab
Authors: Mrs. K. Swarnalatha , B. Indhu, P. Priyanka, C. Hasini,, T. Bhavya, G. Prasanna
DOI Link: https://doi.org/10.22214/ijraset.2023.54196
Certificate: View Certificate
Abstract
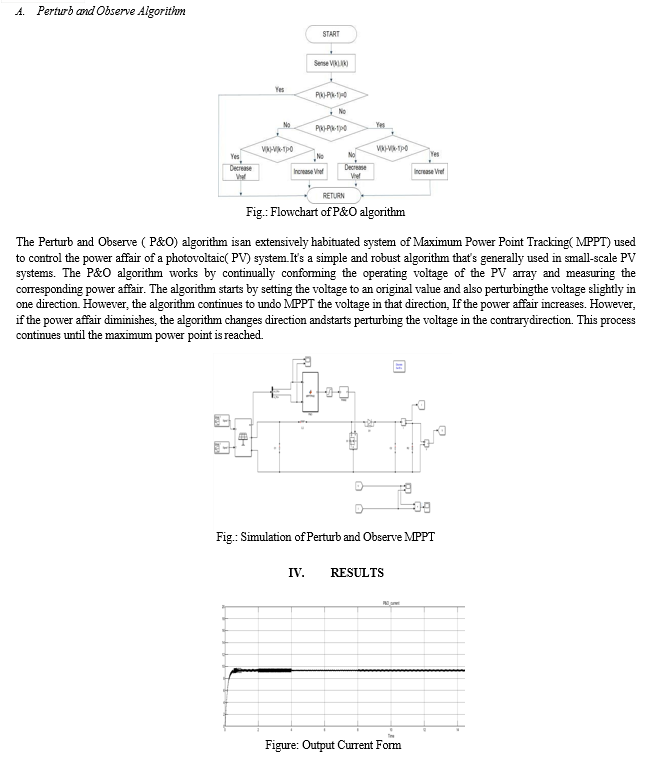
Nowadays, the Photovoltaic cell is one of the most essential parts in the electrical field to convert photo light to voltage and current, at the desired output voltage and frequency by using various control techniques. To increase the production of photovoltaic-based cleaner energy, the maximum power point tracking (MPPT) controller is employed. This project presents the design of an MPPT Controller for Photovoltaic systems. The MPPT controller is used to control and get Maximum Power Point (MPP) from the source. The output power of a photovoltaic (PV) module depends on the solar irradiance and the operating temperature; therefore, it is necessary to implement MPPT controllers to obtain the maximum power of a PV system regardless of variations in climatic conditions. This project reviews the most used MPPT algorithms, which are Perturb and observe (P&O), Incremental conductance method (ICM), and Fuzzy logic control (FLC).
Introduction
I. INTRODUCTION
Photovoltaic (PV) offers an environmentally friendly source of electricity since it is clean, pollution-free, and inexhaustible. However, the output from a PV solar cell alone is not good enough to input into an electricity bank or the main grid because its output is not constant in terms of voltage.
This raises a need to design a controller which can calculate and extract the maximum power point (MPP) at any instant from the solar cells.
Maximum Power Point Tracking, frequently referred to as MPPT is an electronic system that operates the Photovoltaic (PV) modules in a manner that allows the modules to produce all the power they are capable of at that time.
MPPT is not a mechanical tracking system that “physically moves” the module to make them point more directly at the sun but it is a fully electronic system that varies the electrical operating point of the module so that modules can deliver maximum available power.
II. PROBLEM STATEMENT
Photovoltaic (PV) systems have become an important source of power for a wide range of applications. Unfortunately, PV generation systems have two major problems: the conversion efficiency of electric power generation is very low (9-17%), especially under low irradiation conditions, and the amount of electric power generated by solar arrays changes continuously with weather conditions. Moreover, the solar cell V-I characteristic is nonlinear and varies with irradiation and temperature.
III. PROJECT OBJECTIVES
The primary objective of this project is to design an MPPT controller for photovoltaic systems.
In addition, this project has various objectives, which comprise of:
- To design the optimum controller by simulation for the maximupower point tracking.
- To analyze simulation results of the maximum power point controller tracking.
V. FUZZY LOGIC
The fuzzy MPPT (FMPPT) is discovered to be more suitable for tracking MPP than standard algorithms in PV Systems due to the absence of accurate modeling of PV modules and uncertainty in the performance of PV systems due to fluctuating irradiance and temperature. FMPPT can handle uncertainty like unmodeled physical quantities, nonlinearity, and erratic fluctuations in the PV system's operational point. This MPPT technique increases the selection of the duty cycle's variable step size, which raises the photovoltaic system's performance.
Fuzzification, rule inference, and defuzzification are the three functional building elements that make up the fuzzy controller [6, 7]. In the suggested system, the FLC's input variables are error (e) and error change (ce), and the FLC's output is changed in the duty cycle. The chosen input and the chosen output variable have an impact on the fuzzy MPPT algorithm's design considerations and effectiveness. The duty ratio command is often the output variable of the FMPPT algorithm, which is used to modify the PV module's operating point in order to increase power output. The slope of the PV module's P-V curve and variations in this slope is the most often used input variables for FMPPT.
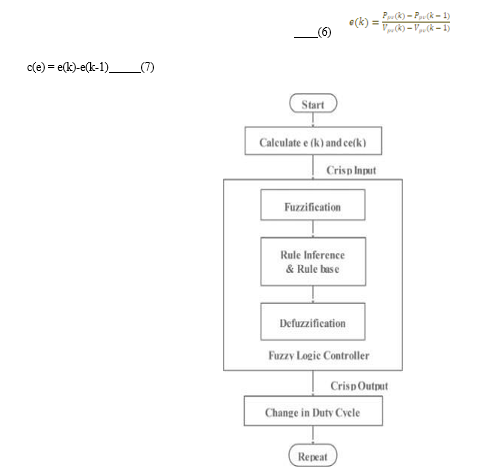
By applying membership function values, the input variables e & ce and the output variable d are transformed into linguistic variables throughout the fuzzification process. These variables are expressed as NB (negative big), NS (negative small), ZE (zero), PS (positive small), and PB (positive big) in various fuzzy levels. In this work, triangle membership functions are taken into consideration, presuming that there is only one dominant fuzzy subset for each given input. Figure 7 displays the membership functions for e, ce, and d. Heuristic-defining rules are essential for modeling the FMPPT, and the fuzzy rule base—a collection of if-then rules—is utilized to handle fuzzified inputs. Based on experimental knowledge of the issue or PV system characteristics, fuzzy rules are discovered.
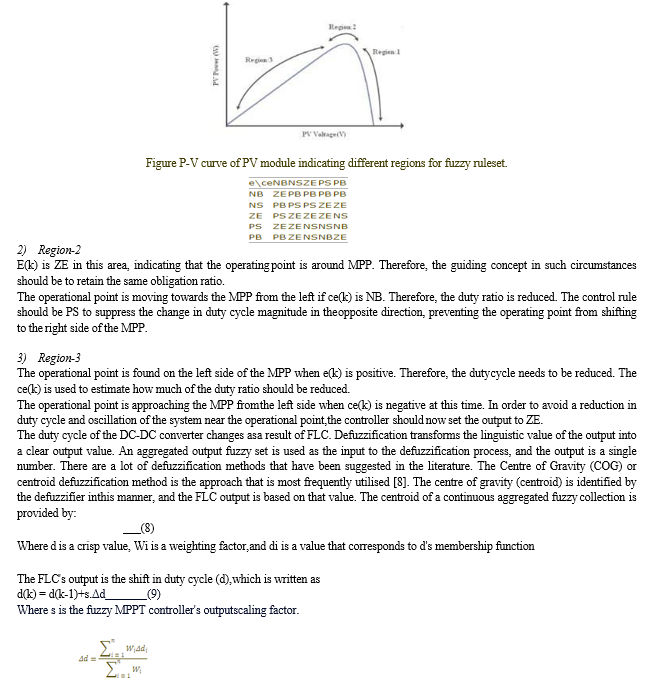
The number of linguistic variables in the input Membership functions affects how many rules there are. In this study, there are 25 fuzzy control rules in the fuzzy rules. The composition operation carried out by a fuzzy inference system creates a logical choice based on fuzzy rules, from which a control output is produced. In this study, the Mamdani fuzzy inference approach with Max-Min composition operation was applied. Figure 8 depicts the three sections that make up the fuzzy rule database.
1) Region-1
In this region, the PV curve's slope, or e(k), is negative. This suggests that the PV module's operating point is to the right of the MPP and that the duty ratio needs to be raised in order to follow the MPP. To determine the duty cycle increase's magnitude, utilize the ce(k). The operating point will be moving towards MPP from the right if e(k) is NS and ce(k) is positive. To stop the system from oscillating at this point, the output is set to ZE.
References
[1] https://ieeexplore.ieee.org/document/6635 826 [2] https://ieeexplore.ieee.org/document/9350 398 [3] https://www.researchgate.net/publication/ 279764230_MPPT_Te chniques_for_PV_Systems [4] https://www.researchgate.net/publication/ 339295619_Comparati ve_Study_of_MPPT_Techniques_for Photovoltaic_Systems [5] https://www.emerald.com/insight/content/ doi/10.1108/FEBE- 03-2021- 0019/full/html [6] https://ieeexplore.ieee.org/document/9059 128 [7] https://ieeexplore.ieee.org/document/7947 932
Copyright
Copyright © 2023 Mrs. K. Swarnalatha , B. Indhu, P. Priyanka, C. Hasini,, T. Bhavya, G. Prasanna. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET54196
Publish Date : 2023-06-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online