

Ijraset Journal For Research in Applied Science and Engineering Technology
“Design of Robotic Arm Controller Using Android app”
Authors: Rupali R. Nimje, Prof. P. R. Indurkar, Prof. Mrs. D. M. Khatri
DOI Link: https://doi.org/10.22214/ijraset.2022.42603
Certificate: View Certificate
Abstract
From ancient times science and technology have eased human life in all ways. So, it’s not surprising that with the advancement of human civilization human needs will be increased and technology has to be developed at the same pace. While meeting these needs and making everyday life easier, better; here comes the importance of robotic arm studies. Robot arms can be controlled by an outside user or by doing predetermined instructions. Nowadays, robot arms are broadly used in the industry and as well the medicine sector. Today, technology is developing at the same pace of rapidly increasing human needs. The work done to meet these needs makes life easier every day, and these studies are concentrated on robotic arm studies. In this project, the robotic arm can move in 4 axis directions with the help of 5 servo motors. With the help of the holder, we can hold the material and move it from one place to another. For doing this, we can connect the android application with the Arduino UNO microcontroller via the Bluetooth module. The abstract part describes why robotic arms have become so important, the introduction part describes types of it, the projected method describes the theory of the project and descriptions of components, lastly how the arm is implemented is described in experimental data and results.
Introduction
I. INTRODUCTION
With the advancement of technology, the complexity of work to increases. There are so many times where the work
involves risks. Here, come the needs of a machine. A machine can easily and more efficiently do unsafe, repetitive work in much lesser time.
The robotic arm can store the sequence of work into its memory and can repeat those when instructed. The term robotics is practically defined as the study, design and use of robot systems for manufacturing.
There are two types of robots-service robots and Industry robots. In daily life robots, can do many jobs to make life
easier. In industry hazardous work can be done by robots to avoid any accidents. Robots can be easily controlled by the
user and are efficient.
There are many types of robotic arms, such as-According to their Structure: Cartesian robot: It can
be used for move the object from one place to another, handling machine tools, arc welding application in various
spheres like in assembly operations 2. Cylindrical robot: It is used for assembly purpose works, handling of machine tools, spot welding. It is a robot that has axes form of a cylindrical coordinate system shows. 3. Spherical robot: It is used for spot welding, fettling machines, gas and arc welding. 4. rticulated robot shows. 5. Parallel robot 6. SCARA robot 7. Anthropomorphic robot: It behaves like a human hand, i.e., independent movement of fingers. According to their uses: Military robots, Industrial robots, Agricultural robots, Domestic robots, Nanorobots, Swarm Robots, Medical robots, Autonomous drones, Sports Field line Making.
II. SYSTEM DESCRIPTION
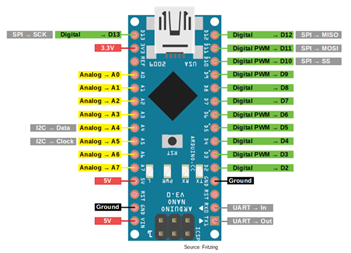
A. Arduino Nano
Although microcontroller type PIC is usually used in programming and software field, Arduino has become very popular in the world in recent times. It is based on Arduino's past wiring and processing projects. Processing is written for non-programming users. Arduino wiring is produced on the basis of the programming language. The common feature of both is that it provides an environment where even the basic knowledge of electronics and programming can easily design. Arduino is now becoming more and more common nowadays.
Even unmanned aerial vehicles made with Arduino, which is used almost every field, are visible. The causes of the spread of Arduino at such a rapid rate are;
- It can be used on all platforms due to the simplicity of the development environment with driver usage
- With the help of the advanced library, even complex operations can be easily solved.
- Programs written in Arduino can run fast because they are not run on any other platform.
- There is a lot of hardware support that is compatible with Arduino and can work together.
- Communication with the environment is easy because it is open source.
- If there are any problems due to a large number of Arduino users, the solution can be easily reached.
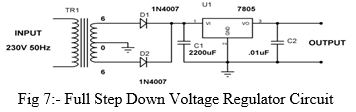
B. Regulated Power Supply
The power supply selected for feeding the control circuit of the servomotors is capable of delivering the same current even if all the synchronous servomotors are operating. When all servo motors are operated at the same time, they draw 0.5A current. In addition, 5 V was needed for the Arduino used for robot movement in the project. This requirement is provided by a 5V power supply.
- Component List
a. Step down transformer
b. Voltage regulator
c. Capacitors
d. Diodes
Let’s get into detail of rating of the devices :
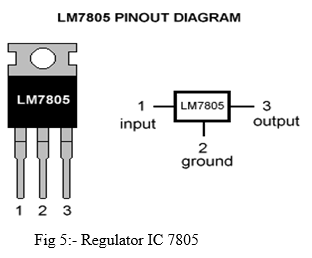
2. Voltage Regulator
As we require a 5V we need LM7805 Voltage Regulator IC.
7805 Rating :
a. Input voltage range 7V- 35V
b. Current rating Ic = 1A
c. Output voltage range VMax=5.2V ,VMin=4.8V
3. Transformer
Selecting a suitable transformer is of great importance. The current rating and the secondary voltage of the transformer is a crucial factor.
a. The current rating of the transformer depends upon the current required for the load to be driven.
b. The input voltage to the 7805 IC should be at least 2V greater than the required 2V output, therefore it requires an input voltage at least close to 7V.
c. So I chose a 6-0-6 transformer with current rating 500mA (Since 6*√2 = 8.4V).
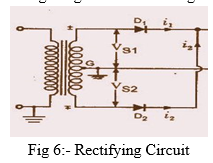
4. Rectifying Circuit
The best is using a full wave rectifier
a. Its advantage is DC saturation is less as in both cycle diodes conduct.
b. Higher Transformer Utilization Factor (TUF).
1N4007 diodes are used as its is capable of withstanding a higher reverse voltage of 1000v whereas 1N4001 is 50V
5. Capacitors
Knowledge of Ripple factor is essential while designing the values of capacitors
It is given by
- Y=1/(4√3fRC) (as the capacitor filter is used)
1. f= frequency of AC ( 50 Hz)
2. R=resistance calculated
R= V/Ic
V= secondary voltage of transformer
- V=6√2=8. 4
- R=8.45/500mA=16.9Ω standard 18Ω chosen
3. C= filtering capacitance
We have to determine this capacitance for filtering
Y=Vac-rms/Vdc
Vac-rms = Vr/2√3
Vdc= VMax-(Vr/2)
Vr= VMax- VMin
- Vr = 5.2-4.8 =0. 4V
- Vac-rms = .3464V
- Vdc = 5V
- Y=0 .06928
Hence the capacitor value is found out by substituting the ripple factor in Y=1/(4√3fRC)
Thus, C= 2314 µF and standard 2200µF is chosen
Datasheet of 7805 prescribes to use a 0.01μF capacitor at the output side to avoid transient changes in the voltages due to changes in load and a 0.33μF at the input side of regulator to avoid ripples if the filtering is far away from regulator.
C. HC-05 Bluetooth module
HC 06 module transfers data between microcontrollers (bidirectional data transfer) by short-range wireless communication.
- It is connected serially and acts as a slave module and depends on the master module to start the connection. As per the connection the master and slave modules are chosen.
- It has the following pins: Key, VCC, GND, TXD, RXD, STATE.
- It has encryption as well as authentication features as a safety module.
- It is operated in +3.3V to +6 V and 40 mA current
- It has a Gauss Frequency Shift Keying.
III. BLOCK DIAGRAM OF PROJECT
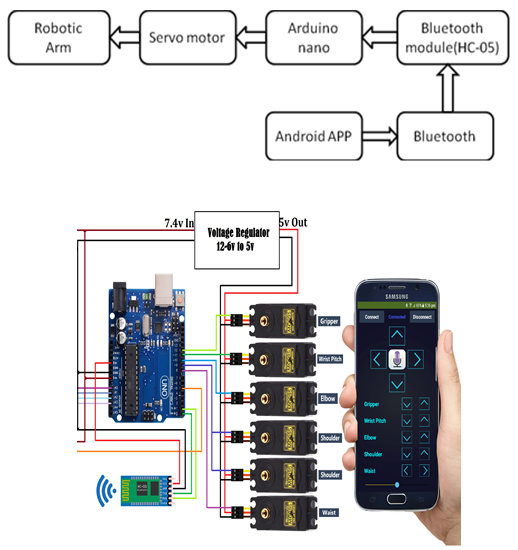
The android application used in this project is developed using MIT App inventor. The UI of this application consists of many buttons which performs various actions. For instance the pick/drop button is for complete grip movement of the fingers. This application is connected to the microcontroller using a Bluetooth Module.
The Bluetooth Module used is HC-05 which provides a range of 10 meters in open space. It is serial port protocol module which ensures a swift serial communication. It has two communication pins Tx and Rx for transmitting and receiving signals respectively. It is powered using the onboard 3.3V pin of the arduino uno. The Arduino Uno microcontroller is an ATmega series microcontroller. It is a 8-bit microcontroller with 14 digital pins and 6 analog pins. The programs are uploaded to the board via Arduino IDE (Integrated Development Environment) using a type B USB cable. It can be powered by a USB cable or by an external battery. The motion of the fingers and the arm is achieved using Servo Motors. SG90 servo motors are used for this as they provide a torque of 2.5kg/cm and only requires a 5V power supply.
A. Programing Softwares
Arduino is an open-source electronics platform based on easy-to-use hardware and software. Arduino boards are able to read inputs - light on a sensor, a finger on a button, or a Twitter message - and turn it into an output - activating a motor, turning on an LED, publishing something online. You can tell your board what to do by sending a set of instructions to the microcontroller on the board. To do so you use the Arduino programming language (based on Wiring), and the Arduino Software (IDE), based on Processing.
Over the years Arduino has been the brain of thousands of projects, from everyday objects to complex scientific instruments. A worldwide community of makers - students, hobbyists, artists, programmers, and professionals - has gathered around this open-source platform, their contributions have added up to an incredible amount of accessible knowledge that can be of great help to novices and experts alike.
Arduino was born at the Ivrea Interaction Design Institute as an easy tool for fast prototyping, aimed at students without a background in electronics and programming. As soon as it reached a wider community, the Arduino board started changing to adapt to new needs and challenges, differentiating its offer from simple 8-bit boards to products for IoT applications, wearable, 3D printing, and embedded environments.
IV. EXPERIMENTAL SETUP
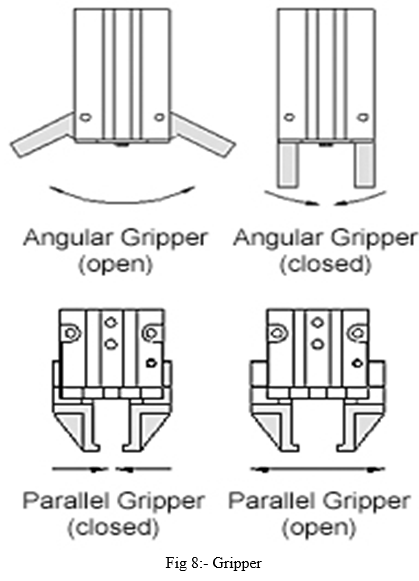
A. Grippers
Gripper is an end-of-arm device often used in material handling applications. Generally, the gripper is a device that is capable of generating enough grip force to retain an object while the robot performs a task on the part such a pick-andplace operation. An angular gripper is used when there is a need to get the tooling out of the way. The advantage for an angular gripper falls on its simple design and only requires one power source for activation. A parallel gripper is used for pulling a part down inside a machine because the fingers fit into small areas better. An advantage of parallel type gripper is that the centre of the jaws does not move perpendicular to the axis of motion. Thus, once the gripper is centered on the object, it remains centered while the jaws close
B. Hardware Setup
The end robotic arm has 4 joints or junctions, each of which is equipped with dc geared motor. Where the base joint has made to move 360 deg clockwise anticlockwise rotations. Joint 2 & 3 are made to move up & down for 120 deg. The end grippers having spur type gear and used to lift heavy objects. There handheld device can search arm present in its circle of 15meters and can tie-up with one device. Where, each one of the robot having Bluetooth connection through hc 05 module.

For connection establishment Bluetooth device uses AT commands for searching, connecting and for setting transmitting baud rate. Controller: Micro controller unit controls all functions of robotic arm. Controller is preprogrammed and loaded to work based on the commands, which receives from mobile device through its attached Bluetooth module.
V. ADVANTAGES AND DISADVANTAGES
A. Advantages
- To hold and grasp objects it can be used. To mix chemicals which is harmful to humans, it can be used.
- It can be widely used in the laboratory.
- We can dig trenches with it.
- It can be used as a source of entertainment as well as for education purposes.
- It can be used vastly in the medical field to perform critical operations.
- We can make cars with it.
- We can simply handle harmful objects with their help.
???????B. Disadvantages
- This arm can only pick up small and light objects. Hence it is small-scale production.
- The circuit complexity, as well as the cost will increase if it has to be implemented on a large scale
- If it is implemented largely there is a possibility that the arm can go out of control and make accidents.
VI. FUTURE SCOPE
Medical Science – Brain-Computer Interface (BCI) is an immerging field of research, can be used to acquire signals
from the human brain and control the arm. They may perform complex operations. Mechanical Design – The arm
can be made more efficient, reliable, improved power. Shoulder, elbow & wrist movement allowing circular &
angular rotations. Universal Gripper - Capable of doing multiple tasks and pick and place any kind of object from
one place to another. Intelligence - Capable of making decisions about the task it performs and stores the sequence
for future purposes as well as learn from its environment.
Conclusion
Now a day’s robotic arms are popular. Though many areas of it still need to be developed thanks to it. It has made work easier and the resulting error level has reduced. The purpose of the project is to provide control of 4 axes moving robot arm design and this robot arm with a suitable microcontroller and bluetooth module with an android application. The necessary theoretical and practical information for this purpose has been obtained and the necessary infrastructure has been established for the project.
References
[1] WMHW Kadir, RE Samin, BSK Ibrahim. Internet controlled a robotic arm. Procedia Engineering. 2012. [2] Araújo, D. Portugal, M. Couceiro, C. Figueiredo and R. Rocha, \"TraxBot: Assembling and Programming of a Mobile Robotic Platform\". In Proc. of the 4th International Conference on Agents and Artificial Intelligence (ICAART 2012), Vilamoura, Portugal, Feb 6-8, 2012. [3] M. Quigley, B. Gerkey, K. Conley, J. Faust, T. Foote, J. Leibs, E. Berger, R. Wheeler, and A. Y. Ng, \"ROS: an open-source Robot Operating System,\" in Proc. Open-Source Software workshop of the International Conference on Robotics and Automation, Kobe, Japan, May, 2009. [4] Sciverse Science Direct; Internet Controlled Robotic Arm; Wan Muhamad Hanif Wan Kadira , Reza Ezuan Saminb Babul Salam Kader Ibrahim (available at www.sciencedirect.com) [5] Robot Arm Control Using Arduino-by Aimn Mohamed Ahmed Ghiet; RESEARCHGATE-June 2017; DOI: 10.13140/RG.2.2.10227.53286 Affiliation: University of Turkish Aeronautical Association [6] Internal Journal on Recent Researches In Science, Engineering and Technology-DEVELOPMENT OF ROBOTIC ARM USING ARDUINO UNO- by Priyambada Mishra, Riki Patel, Trushit Upadhyaya, Arpan Desai. Tech Student, Department of Electronics & Communication, Department of Electronics & Communication, Charotar University of Science & Technology, Changa, Gujarat, India. Volume-5, Issue-5, May 2017. [7] www.google.com [8] https://en.wikipedia.org/wiki/Arduino_Uno [9] www.wikipedia.com/robotic [10] https://en.wikipedia.org/wiki/Stepper_motor [11] https://www.electrical4u.com/stepper-motor-drive [12] https://en.wikipedia.org/wiki/H-bridge [13] https://www.aranacorp.com/en/arduino-and-bluetooth- [14] module-hc-06
Copyright
Copyright © 2022 Rupali R. Nimje, Prof. P. R. Indurkar, Prof. Mrs. D. M. Khatri. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET42603
Publish Date : 2022-05-12
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online