

Ijraset Journal For Research in Applied Science and Engineering Technology
Design of Sliding Mode Control Strategy for DC Motor
Authors: Ajit Laware, Vaishnavi Bhavsar , Prerna Shinde , Rutuja Lokhande
DOI Link: https://doi.org/10.22214/ijraset.2023.53445
Certificate: View Certificate
Abstract
This research paper presents a comparative study of sliding mode control (SMC) strategies and proportional- integral-derivative (PID) control for DC motor applications. The project involves the design and implementation of PID and SMC controllers, as well as the evaluation of their respective response characteristics. Furthermore, the SMC controller is designed using three different sliding surfaces to analyze their impact on the control system\'s performance. A model is developed and simulated using MATLAB/SIMULINK. Overall, the simulation results show that sliding mode controller is superior than PID for speed control of dc motor.
Introduction
I. INTRODUCTION
Speed control of DC motors is a fundamental task in various industrial applications, ranging from robotics and automation to electric vehicles and renewable energy systems. Accurate and efficient control of motor speed is essential to achieve desired performance and meet specific application requirements. Two commonly employed control strategies for speed control of DC motors are Proportional-Integral- Derivative (PID) control and Sliding Mode Control (SMC).
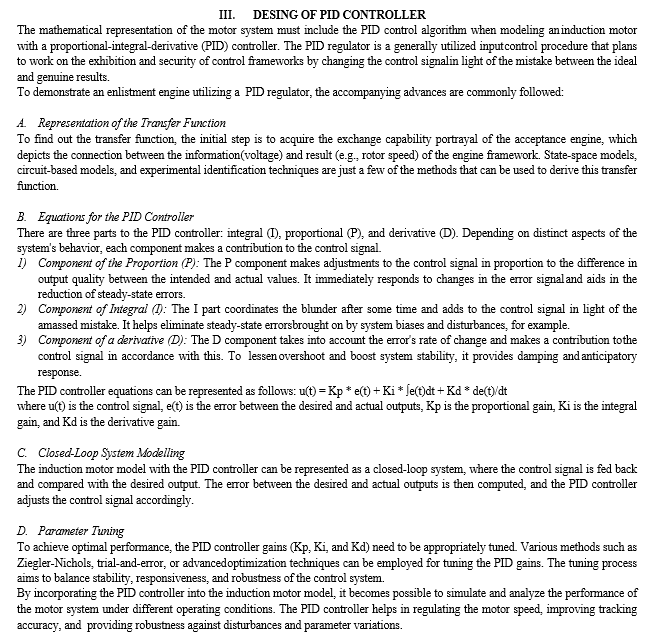
PID control is a classical control method widely used due to its simplicity and effectiveness. It utilizes proportional, integral, and derivative terms to adjust the motor's control signal based on the error between the desired and actual speeds. The proportional term provides immediate response, the integral term addresses steady-state errors, and the derivative term enhances system stability by considering the rate of change of the error. PID controllers are widely adopted due to their intuitive tuning and satisfactory performance in many applications.
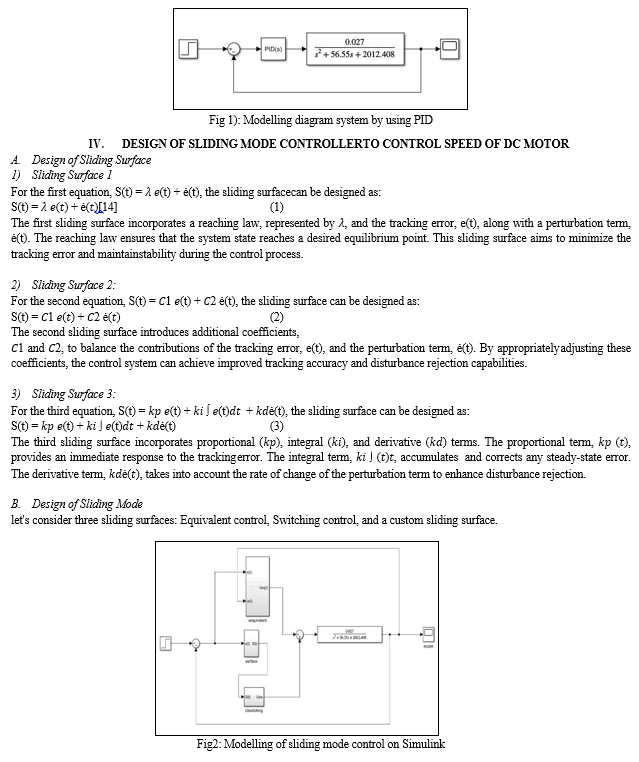
On the other hand, Sliding Mode Control (SMC) is a robust control technique that offers excellent disturbance rejection and tracking capabilities. It operates by creating a sliding surface that guides the system's state trajectory toward a desired manifold. Sliding mode controllers are well-suited for applications with uncertainties, disturbances, and parameter variations. The control law ensures that the system state stays on the sliding surface, resulting in robust performance even in the presence of disturbances.
In this study, the focus is on comparing and evaluating the performance of PID control and Sliding Mode Control for speed control of a DC motor. The objective is to investigate and analyze the strengths and weaknesses of each control strategy in terms of tracking accuracy, disturbance rejection, and robustness.
The paper will first provide an overview of the DC motor system and its mathematical model for speed control. It will then introduce the PID control approach, explaining the design methodology and tuning techniques. Next, the principles and concepts of Sliding Mode Control will be discussed, highlighting its advantages in handling uncertainties and disturbances. The design and implementation of both control strategies will be presented.
Simulation experiments will be conducted to evaluate and compare the performance of PID control and Sliding Mode Control in various operating scenarios, including speed tracking, disturbance rejection, and parameter variations. The results will be analyzed to assess the strengths and limitations of each control strategy.
The findings of this study will provide valuable insights into the selection and design of control strategies for speed control of DC motors. The comparison between PID control and Sliding Mode Control will help researchers and engineers choose the most appropriate control method based on the specific requirements and constraints of their applications. Ultimately, this research contributes to enhancing the understanding and implementation of effective speed control techniques for DC motors.
II. MODLLING OF DC MOTOR
To model a DC motor for sliding mode control using the given transfer function, you can start by analyzing the transfer function and deriving the dynamic equation of the motor.
Due to their simplicity and controllability, DC motors are frequently utilised in a variety of industrial applications. Understanding a DC motor's electrical and mechanical characteristics is necessary for modelling it. The relationship between the electrical input and the ensuing mechanical output is the fundamental idea behind DC motor modeling to their simplicity and controllability, DC motors are frequently utilised in a variety of industrial applications. Understanding a DC motor's electrical and mechanical characteristics is necessary for modelling it. The relationship between the electrical input and the ensuing mechanical output is the fundamental idea behind DC motor modeling to their simplicity and controllability, DC motors are frequently utilised in a variety of industrial applications. Understanding a DC motor's electrical and mechanical characteristics is necessary for modelling it. DC motor modeling's fundamental tenet is the interplay between transfer function.
Conclusion
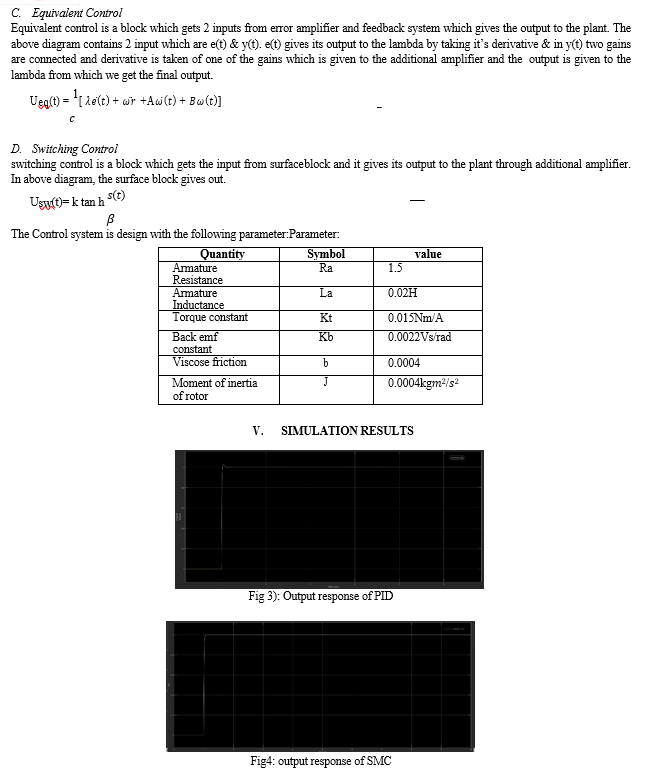
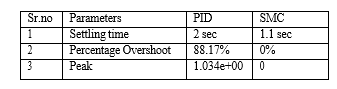
This study looked into the design of sliding mode control strategies for controlling speed in DC motor system. The objective was to evaluate the effectiveness of various sliding mode control strategies in controlling precise speed, resisting parameter changes, rejecting disturbances, and reducing chattering phenomena. The sliding mode control strategy outperformed the conventional PID control method, as evidenced by the obtained results. The sliding mode control strategies demonstrated enhanced capability for disturbance rejection, robustness to parameter variations, and improved speed tracking accuracy. This research contributes to the understanding and application of sliding mode control in the context of speed control for DC motors, demonstrating its effectiveness and potential for achieving high-performance control.
References
[1] Abolfazl Zebardast, Hamid Ghadiri, “DC Motor Control Using Sliding Mode Method”, Science and Research Pioneers Institute, Turkey. September 13, Vol-, PP [2] Srinivasa Kishore Babu Yadlapati, K. Amaresh, “Sliding Mode Speed Control of a DC Motor”,2011 International Conference on Communication Systems and Network Technologies, Article: June 2011, PP-387 TO 391 [3] Emre Hasan Dursun, Akif Durdu, “Speed Control of a DC Motor with Variable Load Using Sliding Mode Control\", Article in International Journal of Computer and Electrical Engineering · July 2016,PP-219-226 [4] 4]Ghulam Murtaza, A.I. Bhatti, Control of “DC motors using sliding mode \"Conference Paper (IBCAST) January 2012,PP 37-32 [5] Alfian Ma’arif, Abdullah Çakan, “Simulation and Arduino Hardware Implementation of DC Motor “Control Using Sliding Mode Controller, Journal of Robotics and Control” (JRC), PP:2715-5072 [6] Dil Kumar T.R, Mija S.J, Design and Performance “Evaluation of Robust SMC schemes for Speed Control of DC Motor”,2014 IEEE International Conference on Advanced Communication Control and Computing Technologies (ICACCCT), PP-88-92 [7] By Hyeung-sik Choi, Yong-heon Park,Yongsung Cho, and Minho Lee Improved “Design for a Brushless DC Motor” (ICACCCT),PP-88-92 [8] Drives A.J. Calderón, B. M. Vinagre ”Fractional Sliding Mode Control of a DC-DC Buck Converter with Application to DC Motor” PP-252-257 [9] Sandeep V. Ambesange, Swapnil Y. Kamble “Application of Sliding Mode Control for the Speed Control of DC Motor” Drives,IEEE l. 28, PP-832-836,2013 [10] Yuri Shtessel, Bhargav Chava, and Christopher Edwards,\"Second Order Sliding Mode Control using Nonlinear Dynamic Sliding Manifold: Lyapunov Approach\",IEEE,Vol-15,2015 [11] Shridhar Rakhonde ,Vandana Kulkarni, “Sliding Mode Controller (SMC) Governed Speed Control of DC Motor”IEEE vol 28, PP-832-836,2013 [12] E.Hasan dursun,M.Latif Levent , Akif Durdu and Omer aydogdu, “Speed Control of a Variable Loaded DC Motor By Using Sliding Mode And Iterative Learning Control”, Published in International Journal of Electrical Energy,Vol.5.No.1,June 2017. [13] Second-order sliding mode control with experimental application, Ilyas Eker, ISA Transactions vol 28, PP-832- 836,2013Authors [14] A. R. Laware, D. B. Talange and V. S. Bandal, (2016), Design of Predictive Sliding Mode Controller for Cascade Control System, 2016 IEEE First International Conference on Control, Measurement and Instrumentation (CMI), pp. 284- 289. [15] Laware Ajit R., Awaze Sneha K., Bandal Vitthal S., and Talange Dhananjay B. \"Experimental Evaluation of Non- Singular Terminal Sliding Mode Controller for Process Control System\" submitted to ECTI Transactions on Electrical Engineering, Electronics and Communications, Vol. 21, No. 1, pp.1-11. [16] Laware Ajit R., Patil Anita K., Bandal Vitthal S. and Talange Dhananjay B. \"Design and Experimental Evaluation of Global Sliding Mode Controller\" International Journal of Systems, Communication and Control (IJSCC), Vol. 14, No. 1, pp.40-59,2023.
Copyright
Copyright © 2023 Ajit Laware, Vaishnavi Bhavsar , Prerna Shinde , Rutuja Lokhande. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET53445
Publish Date : 2023-05-31
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online