

Ijraset Journal For Research in Applied Science and Engineering Technology
Detection of Lane and Speed Breaker Warning System for Autonomous Vehicles Using Machine Learning Algorithm
Authors: Prof. J. H. Yadav, V. G. Chavan, B. K. Dange, N. V. Ghewade, O. N. Gawad
DOI Link: https://doi.org/10.22214/ijraset.2023.56473
Certificate: View Certificate
Abstract
Road safety holds immense significance in today\'s world of transportation, primarily focusing on making roads safer to minimize the chances of accidents and injuries. Road safety revolves around creating and maintaining the road infrastructure. Our System enables vehicles to identify and slow down when approaching road bumps or speed breakers, and potholes. It utilizes cameras and sensors to help drivers stay within their designated lanes keeps an eye on lane markings and provides alerts if the vehicle begins to steer out of its lane, promoting safer and more reliable driving experiences. In high-risk areas or near accident-prone intersections, lane detection technology can trigger speed reduction measures such as illuminated signs and flashing lights when vehicles are not within their lanes. The integration of Natural Language processing (NLP), Computer Vision, Machine learning, and Deep learning can create a comprehensive approach to reducing accidents and improving overall road safety.
Introduction
I. INTRODUCTION
Road transport is the most cost-effective mode of transportation, both for cargo and passengers, keeping in view its level of penetration in populated area. Exposure to adverse traffic environment is high because of the unprecedented rate of motorization and growing urbanization fuelled by high rate of economic growth. As a result, incidents of road accidents, traffic injuries have remained high. Due to infrastructure and resource limitations many developing countries suffer from poor road conditions.
A total number of 4,61,312 road accidents have been reported by States and Union Territories (UTs) during the calendar year 2022, claiming 1,68,491 lives and causing injuries to 4,43,366 persons. The number of road accidents in 2022 increased by 11.9 percent compared to previous year 2021 alone in India. These figures translate, on an average, into 1,264 accidents and 462 deaths every day or 53 accidents and 19 deaths every hour in the country. Road accidents are a multi-causal phenomenon and are the result of a combination of various factors. These can broadly be categorized into (i) human error, (ii) road condition /environment and (iii) vehicular condition. These factors act in a simultaneous manner to cause road accidents.
Many studies have been done on road surface detection using computer vision. Most of those approaches focused on improving road surface detection from a single image and using hardware sensors to detect ground surface. However, these approaches suffer from high latency and are not adequate to provide real-time notification alerts to drivers.
In this paper, we have used a custom data set to detect the potholes and speed breakers for on-road drivers. The model we use is CNN because of its detection speed and better accuracy. The road conditions in India are different from other developed nations. Our main goal is to detect potholes, deep ridges and improper speed breakers.
II. LITERATURE SURVEY
Paper 1: Speed Breaker Detection and Mapping using IoT. 20-22 August 2020.Author: Rahul Ramakrishnan, Chetna Sharma
In this approach, GPS coordinates are stored in an online database system that is available to the public through a portal. When the vehicle is at a predefined distance away from the speed breaker, the user is notified resulting in improved accuracy with every usage.
Paper 2: Real-Time Detection of Roadside Speed Breakers and Obstacles up to Knee Level. 2019 IEEE International Conference on (BECITHCON)
Author: Prottoy Saha, Muhammad Sheikh Sadi
The proposed device detects speed breakers on the street and other obstacles at floor level and knee level around individuals. The system includes six infrared sensors, an Arduino Uno, a power supply, three motors for vibration, and an earphone.
Paper 3: Pothole and Speed Breaker Detection Using Smartphone Cameras and Convolutional Neural Networks.2020 IEEE Region 10 Symposium (TENSYMP)
Author: Zahid Hasan, Samsoon Nahar Shampa
Proposed a model to detect unwanted potholes, deep ridges, and speed breakers using computer vision and machine learning tools. Developed a customized dataset (called Bumpy) that was used to train machine learning algorithms and proposed a method where they use the Tensorflow pre-trained model to detect the potholes, deep ridges, and speed breakers.
Paper 4: Lane Detection in Autonomous Vehicles: A Systematic Review. Date of Publication: 05 January 2023
Author: Noor Jannah Zakaria, Mohd Ibrahim Shapai 1, (Member, IEEE), Abd Ghani 1, Mohd Najib Mohd Yassin 2,3, (Member, IEEE), Mohd Zamri Ibrahim 4, and Nurbaiti Wahid 5
This research aims to provide a complete overview of the literature on lane detection methods, highlighting which approaches are currently being researched and the performance of existing state-of-the-art techniques Also, the paper covered the equipment used to collect the dataset for the training process and the dataset used for network training, validation, and testing.
III. SYSTEM ARCHIETECTURE:
System Architecture for Machine Learning-Based
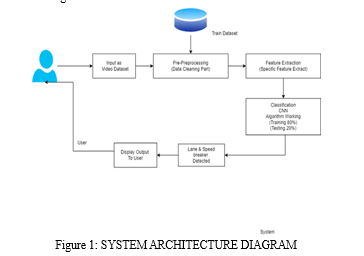
A. Flow of Work: (System Arch)
Deep learning techniques are used to analyse video frames and identify lane speed breakers and potholes using Convolutional Neural Networks (CNNs) with a video dataset. CNN-based systems that use video data to identify potholes and lane speed breakers operate as follows:
1) Detecting Lane Speed Breakers:
a. Data Gathering: Compile a video collection of road scenes with speed bumps. The video clips in this collection were taken with cameras installed on cars or other road infrastructure.
b. Video Frame Extraction: To generate a collection of images, discrete frames are extracted from the video dataset at regular intervals or significant moments. The CNN model receives these frames as input.
c. Pre-processing: To make sure the CNN model can interpret the collected frames properly, pre-process them. This can involve scaling, normalisation, and data augmentation. -
d. Training: Using the previously processed video frames, train a CNN model. As speed breakers show up in the video frames, the model is trained to identify the visual patterns that correspond with them.
e. Inference: Utilise the trained CNN model to examine the frames of an ongoing video feed. After processing each frame, the model determines if the current frame has a speed breaker or not.
f. Alert Generation: The system can issue warnings or alerts to drivers informing them of impending speed limits when it detects one in a video frame.
2) CNN Mathematical Expression
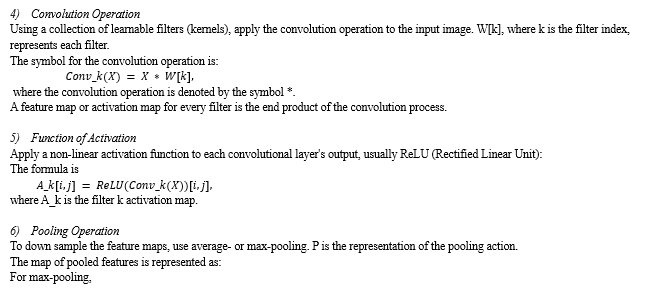
a. Using the input images, apply convolutional layers. In convolution operations, patterns and features are found by sliding filters, or kernels, over the input.
b. Add pooling layers to the feature maps (such as max-pooling or average-pooling) in order to decrease the spatial dimensions and down sample.
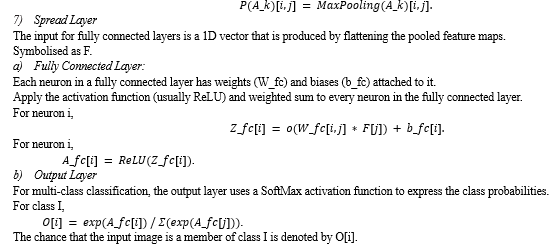
c. To accomplish high-level feature extraction and classification, add one or more fully connected layers, sometimes referred to as thick layers.
3) CNN
a. Because CNNs can automatically learn hierarchical features from raw pixel data, they are incredibly well-suited for jobs involving the interpretation of images and videos.
b. From picture or video frames, CNNs may be trained to extract relevant features like edges, textures, and object shapes—properties that are essential for identifying patterns connected to accidents.
Conclusion
In conclusion, significant improvements in road safety, driver comfort, and overall vehicle performance have been brought about by the machine learning-based integration of speed limiter, pothole, and lane detecting systems in automobiles. These devices are essential for improving safety since they promptly notify drivers of potential dangers such potholes, speed breakers, and lane changes. Deviations, hence lowering the number of collisions and damage to vehicles. Additionally, they improve ride comfort for passengers by enabling more comfortable transitions across uneven surfaces. Beyond security Additionally to providing comfort and convenience, these systems enhance the health and improve traffic flow, resulting in a more practical and ecologically friendly a pleasant driving encounter.
References
[1] Zou, Q., Jiang, H., Dai, Q., Yue, Y., Chen, L. and Wang, Q., 2022. Detection of Lane and Speed Breaker Warning System for Autonomous Vehicles using Machine Learning Algorithm. IEEE Transactions on vehicular technology, 69(1), pp.41-54. [2] Aravind, H., Sivraj, P. and Ramachandran, K.I., 2020, July. Design and Optimization of CNN for Lane Detection. In 2020 11th International Conference on Computing, Communication and Networking Technologies (ICCCNT) (pp. 1-6). IEEE. [3] Galvez, R.L., Dadios, E.P., Bandala, A.A. and Vicerra, R.R.P., 2019. YOLO-based Threat Object Detection in X-ray Images. In 2019 IEEE 11th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management (HNICEM) (pp. 1-5). IEEE. [4] Xu, Y., Zhou, X., Liu, P. and Xu, H., 2018, April. Real-Time Pedestrian Detection in Crowded Scenes Using Deep Omega-Shape Features. In 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP) (pp. 1882-1886). IEEE.
Copyright
Copyright © 2023 Prof. J. H. Yadav, V. G. Chavan, B. K. Dange, N. V. Ghewade, O. N. Gawad. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET56473
Publish Date : 2023-11-02
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online