

Ijraset Journal For Research in Applied Science and Engineering Technology
To Develop an Efficient Critical Vehicle Seamless Movement Technique using AI and ML Methods
Authors: Prof. Dr. Soumya Patil, Sujith N E, Yalamanchili Sai Gokul
DOI Link: https://doi.org/10.22214/ijraset.2022.45520
Certificate: View Certificate
Abstract
Traffic congestion is becoming one of the critical issues by posing significant hurdles to critical vehicles, to nature by posing significant pollution. Not only can traffic congestion delay the movement of essential vehicles, but it can also extend travel times, contribute to driver stress, and increase fuel consumption and pollution. Megacities struggle the most from traffic congestion, despite the fact that they seem to be everywhere. Because of this, real-time road traffic density calculations are necessary for better signal control and traffic management. The traffic controller is one of the key elements influencing traffic flow. Therefore, in order to better fulfil this expanding demand, traffic control needs to be improved. Our system\'s objective is to use real-time traffic junction camera photos to compute traffic density using AI and image processing. It also focuses on the algorithm for changing traffic signals based on the movement of essential vehicles and vehicle density to reduce congestion, speed up the movement of essential vehicles and reduce pollution.
Introduction
I. INTRODUCTION
One of the many problems the globe is experiencing as a result of population growth and the quick increase in vehicles is traffic congestion. The rate of road construction is only one-third that of vehicle growth in nations like India. Statistics show that the current annual growth rate of autos is above 11%, whereas the annual expansion rate of roads is just approximately 4%. The consequences of increased traffic congestion are numerous. Congestion stifles economic progress by delaying services, wasting fuel, and harming the environment. According to studies, traffic congestion wastes 2.5 lakh liters of non-renewable fuel in a single day. This can not only slow the flow of vehicles, but also obstruct the movement of emergency vehicles. Traditional traffic signals make it challenging for an emergency vehicle to pass through a signal. Since every second is as valuable as a life, emergency vehicles are crucial for saving lives. Delays in the emergency firemen services in an emergency situation have resulted in several lives and properties being lost. By creating an intelligent automated system that is integrated with a traffic control system and recognises and prioritises emergency vehicles, we can resolve these problems. We must develop a system that can identify cars and categorise them as either emergency or non-emergency vehicles. In this study, the problem is solved by using CCTV footage of the traffic junction to find the emergency vehicle. Images are captured by a CCTV camera at regular intervals. After discovering each automotive, they classified it as either an emergency vehicle or a regular vehicle. Our initiative focuses on the detrimental effects that traffic congestion has on the transportation system for emergency vehicles. Critical vehicles have a tough time navigating through traffic in places like India, where the road width and length make it hard to build a dedicated lane for emergency vehicles.
II. LITERATURE SURVEY
A. Arduino-UNO based traffic control system
Vogel, I. Oremovi?, R. Šimi? and E. Ivanjko proposes an Arduino-UNO based system that aims to reduce traffic congestion and waiting time. Through the camera, this system captures photos, which are then processed in MATLAB to remove saturation and colours and transform the image to a threshold image from which the traffic density is estimated. The simulation packages are preconfigured, and USB is used to connect MATLAB and Arduino. The Arduino determines each lane's green light time based on traffic volume and density. But there are a number of problems with this approach. It is challenging to accurately count the number of vehicles on the road since the cars frequently overlap. Additionally, diverse things hampered detection because they were also turned to black and white, making it unable to distinguish between common objects like billboards, poles, and trees with vehicles. Vehicle Detection using Image Processing. Kanungo, A. Sharma and C. Singla, makes use of a support vector machine algorithm along with image processing techniques. From live video. images in small frames are captured and the algorithm is applied. Small frames of photos are taken, and the algorithm is then used. OpenCV is used for image processing, and before SVM is used, the images are transformed to grayscale. This device may identify red light violations in addition to traffic density.
B. Comparing Various existing methods
Prof. Sheetal Jagtap and Ms. Saili Shinde discuss the various traffic light management approaches. This paper observes that each technique has a common architecture: choose input data, acquire traffic parameters from input data, process it, determine density, and update parameters. The first technique makes use of VANETS to gather data on each vehicle's location, which is then forwarded to the closest Intelligent Traffic Light with the assistance of installed GPS. Additionally, these ITLs will send updated statistics to adjacent automobiles. Drivers would receive information in the event of accidents so they may select an alternate route to avoid traffic. However, this technique is not feasible as its deployment is quite expensive. In the second method, infrared sensor-based microcontrollers are used, which capture the unique ID of every car using transmitter and receiver. In case of an emergency situation, vehicle’s radio frequency tags can be used to identify them and let other vehicles move. This method detects red light violations. However, this technique is not flexible due to the fact that infrared sensors need to be in sight. The third method employs the fuzzy logic methodology, which employs two fuzzy logic controllers, one for signal optimization and the other for extending the green phase of a road in an intersection. Video cameras are utilised to collect input data and are placed at the incoming and outgoing lines. The controller then uses the data gathered by these sensors to make the best judgments possible and minimise the objective function. In the fourth method, fuzzy logic is used, and the system takes in the number of vehicles and the average speed of traffic flow in each direction as the input parameters. The number of vehicles and the average speed of traffic flow can be determined using sensors placed on the road. In the fifth method, photoelectric sensors are used, which are set at some distance apart, that capture data and send it to the traffic cabinet, which calculates the weight off each road and then set the traffic light accordingly. However, the maintenance cost is quite high. In the sixth method, video imaging is used to capture the data. Dynamic background subtraction and various morphological operations are performed to capture a clear image of the vehicle. Every time a new vehicle enters the area of interest, a new rectangle is drawn and vehicle count is incremented. The algorithm is easy to implement but does not handle occlusion and shadow overlapping.
C. Smart Traffic system using ANN and fuzzy Controller
Renjith Soman proposes a smart traffic light system using ANN and fuzzy controller. This system makes use of images captured from cameras installed at traffic site. The image is first converted to a grayscale image before further normalization. Then, segmentation is performed using sliding window technique to count the cars irrespective of size and ANN is run through the segmented image, the output of which is used in fuzzy controller to set timers for red and green light using crisp output. Results had an average error of 2% with execution time of 1.5 seconds.
D. Simulation Environment
According to A. Maria, a simulation is an imitation of a model based on a real-world system. A simulation model can be used to adjust many parameters and then test a system that is expensive or complex to build. Different states can be investigated using a simulation model. In comparison to the current FCTL system, a simulation environment can be constructed to show the situation using the new traffic light application. It can also use the new programme to simulate operations in various traffic conditions.
III. METHODOLOGY
Our proposed system takes images from the CCTV cameras at traffic junctions as input for real-time critical vehicle detection and traffic density calculation using image processing and object detection. This image is initially sent to the vehicle detection algorithm. The number of vehicles in each class, such as ambulance, cars, bicycles, buses, and trucks are calculated.The traffic density is then calculated using the weightage allotted to different classes of vehicles. The signal switching algorithm uses this density, along with a few other factors including the presence of critical vehicles, to determine the green signal time for each lane. The red signal times have been modified to reflect this. In order to prevent lane starvation, the green signal time is limited to a maximum and minimum value. To demonstrate the system's effectiveness, a simulation is created.
This project can be broken down into 3 modules:
A. Vehicle Detection Module
This module is in charge of detecting class of vehicles and number of vehicles in the image using YOLO algorithm. More specifically, each class of vehicle is given a specified weightage based on its importance, size, and the approximate number of passengers that may travel in it, so that a realistic traffic density can be determined. The dataset for training the model will be prepared by scraping images from google and labelling them manually.
YOLO is a smart convolutional neural network (CNN) that can conduct real-time object detection. The technique divides the image into areas and predicts bounding boxes for each region using a single neural network applied to the entire image.
B. Signal Switching Module
This algorithm updates the red, green, and yellow timers of all signals. These timers are set bases on the count of vehicles of each class received from the vehicle detection module and several other factors such as the number of lanes, average speed of each class of vehicle, and so on. The findings from the vehicle detection module are used to distinguish critical vehicles from other vehicles. The signal would then be changed based on the critical vehicles' position.

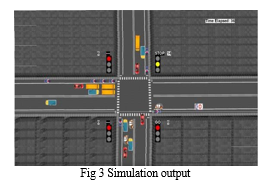
C. Simulation Module
To simulate traffic lights and automobiles moving across a traffic intersection, a simulation is created from scratch using the Pygame module. Pygame is a set of crossplatform Python tools for creating video games. It offers sound and graphics libraries that can be utilised with the Python programming language. The simulation contains a four-way intersection with four traffic lights. On top of each signal is a timer that displays the amount of time until the signal changes from green to red or red to green. Cars, bicycles, buses, trucks, and rickshaws arrive from all directions. Some of the vehicles in the rightmost lane turn to cross the intersection to make the simulation more realistic.
IV. RESULTS
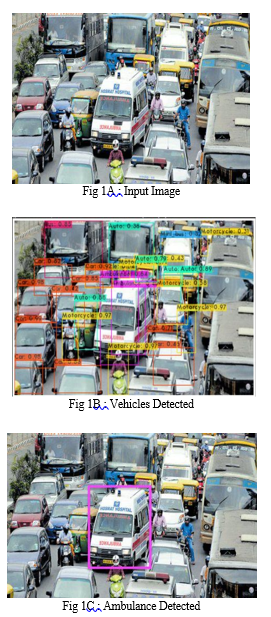
A. Evaluation of Vehicle Detection Module
The vehicle detection module was put to the test using a variety of test photos containing various numbers of vehicles, and it was discovered that the detection accuracy was between 85 and 90%. Fig. 1(A)(B)(C) above displays some test findings. This is adequate but not ideal. Lack of a suitable dataset is the main cause of the low accuracy. This can be addressed by training the model with actual traffic camera footage, which will increase the system's accuracy.
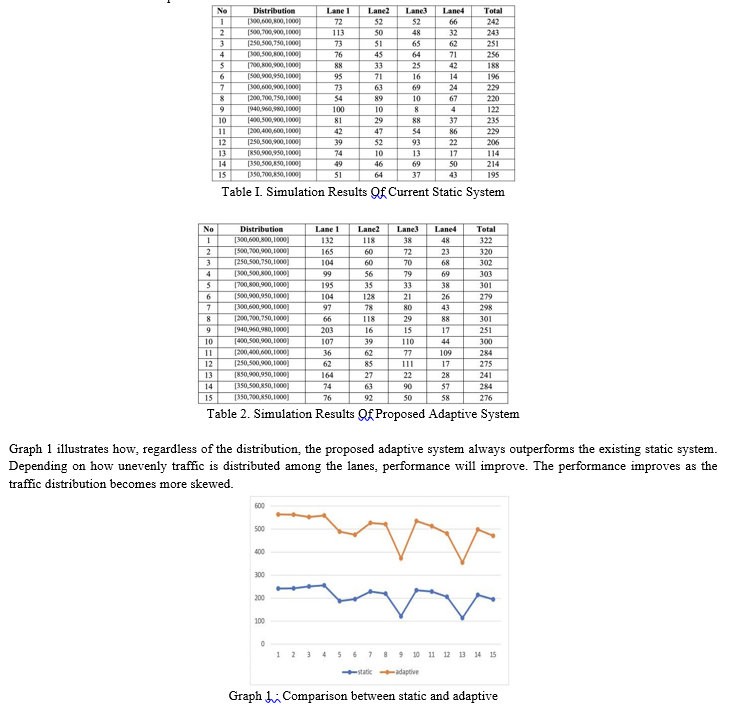
B. Evaluation of the Proposed Adaptive System
In order to compare the proposed adaptive system to the current static system, 15 simulations of each system were run for 5 minutes each, with varying traffic distributions across the 4 directions. The number of cars that could pass the crossing in a certain amount of time was used to gauge performance. To put it another way, the signal's idle time—the period of time when it is green but no cars are passing the intersection—is compared. This affects how long the lines are at the other signals and how long it takes for vehicles to wait. According to the distribution [a,b,c,d], the probabilities of a vehicle being in lanes 1, 2, 3, and 4 are, respectively, a/d, (b-a)/d, (c-b)/d, and (d- c)/d. For instance, the distribution in simulation 1 has the value [300,600,800,1000], which denotes probabilities of 0.3, 0.3, 0.2, and 0.2. The results were tabulated in terms of the total number of vehicles passed as well as the number of vehicles that were passed in each lane.
V. FUTURE WORK
The project can be further expanded to include the following functionalities to improve traffic management and reduce traffic congestion:
- Identification of vehicles violating traffic rules: Vehicles going through red lights can be spotted in an image or video stream by drawing a violation line and capturing the number plate if the line is crossed when the signal is red. Similarly, lane switching can be recognised. Background subtraction and image processing techniques can be used to accomplish these results.
- Accident or breakdown detection: Intersections are prone to serious wrecks because numerous types of injurious collisions, such as angle and left-turn collisions, frequently occur there. As a result, precise and timely identification of accidents at junctions has enormous benefits in terms of saving property and lives while also reducing congestion and delay. This can be accomplished by identifying automobiles that remain motionless for an extended period of time in an inconvenient location, such as in the middle of the road, while excluding parked vehicles.
- Synchronization of traffic signals at multiple intersections: Synchronizing traffic signals along a street can help commuters since once a vehicle enters the street, it can continue without halting.
Conclusion
By following the above-mentioned steps and performing image processing, we can be able to achieve the following results: 1) This Adaptive Traffic Signal Timer uses live images from the cameras at traffic junctions for traffic density calculation using YOLO(You Only Look Once) object detection and sets the signal timers accordingly. 2) It can detect the emergency vehicles such as Ambulance and adapt to the given situation accordingly thus reducing the traffic congestion for the critical vehicles. Thus Signal switching would reduce the amount of time it takes for critical vehicles to pass. 3) People can anticipate to spend substantially less time stuck in traffic if the dynamic traffic control system is implemented, and they can use the timers to turn off their engines, decreasing fuel consumption and emissions accordingly and Reducing the amount of time spent at a traffic signal can help people be more productive. This idea can be implemented for a larger network by using algorithms to ensure safety and stability of systems. Also, the extended time can be calculated by the system itself. By keeping records of traffic patterns and using an algorithm, the timing can be chosen according to the traffic patterns.
References
[1] Vogel, I. Oremovi?, R. Šimi ? and E. Ivanjko, \"Improving Traffic Light Control by Means of Fuzzy Logic,\" 2018 International Symposium ELMAR, Zadar, 2018, pp. 51-56, doi: 10.23919/ ELMAR.2018.8534692. [2] A. Kanungo, A. Sharma and C. Singla, \"Smart traffic lights switching and traffic density calculation using video processing,\" 2014 Recent Advances in Engineering and Computational Sciences (RAECS), C h a n d i g a r h , 2 0 1 4 , p p . 1 - 6 , d o i : 1 0 . 11 0 9 / RAECS.2014.6799542. [3] Ms. Saili Shinde, Prof. Sheetal Jagtap, Vishwakarma Institute Of Technology, Intelligent traffic management system:a Review, IJIRST 2016 [4] Renjith Soman \"Traffic Light Control and Violation Detection Using Image Processing”.” IOSR Journal of Engineering (IOSRJEN), vol. 08, no. 4, 2018, pp. 23-27 [5] A. Maria, Introduction to modelling and simulation, in Proceed- ings of the 29th conference on Winter simulation, IEEE Computer Society, Atlanta, GA, USA, 1997, pp. 7–13. [6] Rajeshwari S., Santhoshs Hebbar, Varaprasad Golla “ Implementing Intelligent Traffic Control System for Congestion Control, Ambulance Clearance and Stolen Vehicle Detection ” DOI 10.1109/ JSEN.2014.2360288, IEEE Sensors Journal [7] Abdoos M., Mozayani N and Bazzan A.L.C., “Traffic Light Control in Non- Stationary Environments based on Multi agent Q-learning”, in Proc. IEEE Conference on Intelligent Transportation Systems, pp.580- 1585, 2011. [8] “Traffic Congestion in Bangalore-A Rising Concern”, http://www.commonfloor.com/guide/trafficcongestion-in-bangalore-a-rising-concern-27238.html. [9] I. Kosonen, “Multi-agent fuzzy signal control based on real-time simulation,” vol. 11, no. 5, pp. 389– 403, 2003. [10] Tzutalin, ‘LabelImg Annotation Tool’, 2015. [Online]. Available: https://github.com/tzutalin/ labelImg
Copyright
Copyright © 2022 Prof. Dr. Soumya Patil, Sujith N E, Yalamanchili Sai Gokul. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET45520
Publish Date : 2022-07-11
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online