

Ijraset Journal For Research in Applied Science and Engineering Technology
Development of Monocular Vision based Autonomous Car
Authors: Kotresh H M, Swathi S, Sahana M S, Veena Vinodini M N, Sahana G K
DOI Link: https://doi.org/10.22214/ijraset.2023.50475
Certificate: View Certificate
Abstract
The evolution of the artificial intelligence has served as the catalyst in the field of technology. We can now develop things which was once just an imagination. One of such creation is the birthof Autonomous cars. Days have come one can do their work even touching steering wheel, accelerator you will still be able to reach your target destination safely. Self-driving car (Autonomous cars) is a robotic vehicle that is designed to travel between destinations without human intervention. It is capable of sensing environment and navigate without human input. Autonomous cars must have control systems that are capable of analysing sensor data to distinguish between different cars on the road. The potential benefits of autonomous cars include reduced mobility and infrastructure costs, increased safety, increased mobility, increased customer satisfaction and reduced crime. Self-driving cars rely on software which needs to be thoroughly tested. Testing self-drivingcar software in real traffic is not only expensive but also dangerous and has already caused fatalities. Virtual tests, in which self-driving car software is tested in computer simulations, offer a more efficient and safer alternative compared to naturalistic field operational tests. However, creating suitable test scenarios is laborious and difficult. In this paper we combine procedural content generation, a technique commonly employed in modern video games, and search-based testing, a testing technique proven to be effective in many domains, in order to automatically create challenging virtual scenarios for testing self-driving car soft- ware. Our as Fault prototype implements this approach to generate virtual roads for testing lane keeping, one of the defining features of autonomous driving. Evaluation on two different self-driving car software systems demonstrates that as Fault can generate effective virtual road networks that succeed in revealing software failures, which manifest as cars departing their lane. Compared to random testing as Faultwas not only more efficient, but also caused up to twice as many lane departures
Introduction
I. INTRODUCTION
Self-driving car (also known as a robot car, autonomous car, or driverless car) is a robotic vehicle that is designed to travel between destinations without human intervention. It is capable of sensing environment and navigate without human input. Autonomous cars must have control systems that are capable of analysing sensor data to distinguish between different car son the road. The potential benefits of autonomous cars include reduced mobility and infrastructure costs, increased safety, increased mobility, increased customer satisfaction and reduced crime. Specifically, a significant reduction in traffic collisions; the resulting injuries; and related costs, including less need for insurance.
Autonomous cars are predicted to increase traffic flow; provide enhanced mobility for children, the elderly and disabled; review traveler’s from driving and navigation chores; lower level fuel consumption; significantly reduce needs for parking space; and facilitate business models for transportation as a service, especially via the sharing economy. This shows the vast disruptive potential of the emerging technology. In Spite of the various potential benefits to increased vehicle automation, there are unresolved problems, Such as safety, technology issues, disputes concerning liability, resistance by individuals to forfeiting control of their cars, customer concern about the safety of driverless cars, implementation of a legal framework and establishment of government regulations; risk of increased suburbanization astravel becomes less costly and time consuming. Many of these issues arise because autonomous objects, for the first time, would allow computers to roam freely, with many related safety and security concerns.
II. METHODOLOGY
This development aims to build a monocular vision autonomous car prototype using Raspberry Pias a processing chip. An HD camera along with an ultrasonic sensor is used to provide necessary data from the real world to the car. The car is capable of reaching the given destination safely and intelligently thus avoiding the risk of human errors. Many existing algorithms like lane detection, obstacle detection are combined together to provide the necessary control to the car.
The project aims to build a monocular vision autonomous car prototype using Raspberry Pi as a processing chip. An HD camera along with an ultrasonic sensor is used to provide necessary data from the real world to the car. The car is capable of reaching the given destination safely and intelligently thus avoiding the risk of human errors. Many existing algorithms like lane detection, obstacle detection are combined together to provide the necessary control to the car.
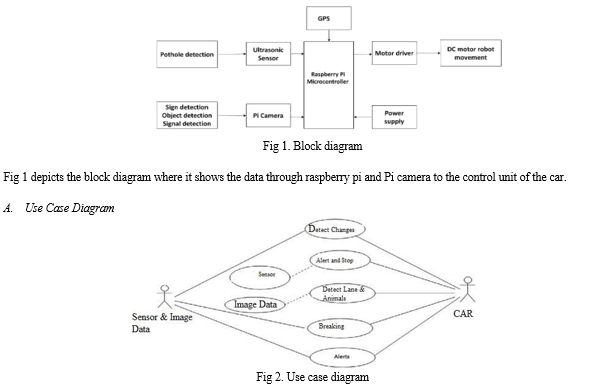
The fig.2 shows the user Case diagram how the sensor works accordingly with all the algorithms to provide the suitable output. A use case diagram can identify the different types of users of a system and the different use cases and will often be accompanied by other types of diagrams as well. While a use case itself might drill into a lot of detail about every possibility, a use case diagram can help providea higher-level view of the system. It has been said before that "Use case diagrams are the blueprints for your system". They provide the simplified and graphical representation of what the system must actually do.
III. TECHNICAL REQUIRMENTS
A. Raspberry-PI
The Raspberry Pi is a small low cost single board computer having a processor speed ranging from 700 MHz to 1.2 GHz for the Pi 3.The on-board memory ranges from 256 MB to 1 GB RAM. The boards supports up to 4 USB ports along with HDMI port. Alongfrom all this it has number, It supports Scratch and Python programming languages. It supports many operating systems like Ubuntu MATE, Snappy Ubuntu, Pidora, Linutop and many more out of which Raspbian is specifically designed to support Raspberry Pi’s hardware.

B. PI-Camera
Pi camera is great gadget to capture time-lapse, slow motion with great video clarity. It connects to Raspberry Pi via a flexible elastic cord which supports serial interface. The camera image sensor has a resolution of five megapixels and has a focused lens. The camera provides a great support for security purpose. Various characteristics of the camera are it supports 5MP sensor, Wide image, capable of 2592x1944 stills, 1080p30 video on camera module.
IV. IMPLEMENTATION & RESULT
In this project the main implementation is of hardware components and the conditional work is done by software part hence we will concentrate on hardware implementation, and its working in this chapter.
In hardware we use few components like Raspberry-pi which is based on Arm-microcontroller which is the brain of our device and Pi-camera is used to capture image.
The model takes an image with the help of Pi cam attached with Raspberry-Pi on the car. The Raspberry-Pi and the laptop is connected to the same network, the Raspberry Pi sends the image captured which serves as the input image to the Neural Network. The image is grey- scaled before passing it to the Neural Network. Upon prediction the model gives oneof the four output i.e. left, right, forward or stop. When the result is predicted corresponding Raspberry-pi signal is triggered which in turn helps the car to move in a particular direction with the help of its controller.
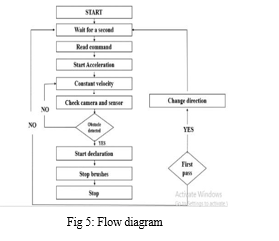
The fig. 5 depicts the control flow diagram where it shows the process flow of data through raspberry pi and Pi camera to the control unit of the car.
A. Results
Finally we were able to design a vision based autonomous car controlled based automated professional real time. Reasonable expectation is defined in the software requirement specification- a document that describes all users’ visible attributes of the software. The specification contains a section title “validation criteria”. Information contained in that section forms the basis for validation testing approach .Proposed System which is capable of moving itself by capturing images from pi camera and move direction accordingly
V. FUTURE SCOPE
There is huge scope of self-driving cars in future, the various automobile companies are improving their autonomous cars rapidly making them more accurate and secured. By using multiple cameras and sensors, the accuracy can be improved. Designing a system where every car is interconnected to nearby cars will avoid traffic congestion in future.
Conclusion
With the help of Image Processing and Machine Learning a successful model was developed which worked as per expectation. Autonomous vehicles will benefit the economy through fuel efficiency, the environment through reduced carbon emissions. Improves the accuracy of internal systems, and prevent accidents.
References
[1] K. P. Horn, “Suppressing traffic flow instabilities,” Intelligent Transportation Systems-(ITSC), 2013 International IEEE Conference on. [2] T. Baran and B. K. P. Horn, “A Robust Signal-Flow Architecture For Cooperative Vehicle Density Control,” ICASSP (2013). [3] L. Wang, B. K. P. Horn and G. Strang, “Eigenvalue and Eigenvector Analysis of Stability for a Line of Traffic,” Studies in Applied Mathematics, vol.138, January 2017. [4] B. K. P. Horn, Robot Vision. MIT Press, Massachusetts, 1986. [5] B. K. P. Horn, Y. Fang, and I. Masaki, “Time to contact relative to a planar surface,” IEEE intelligent vehicles symposium. 2007. [6] B. K.P. Horn and Brian G. Schunck, “Determining optical flow,” Artificial intelligence 17.1-3 (1981): 185-203. [7] A. R. Bruss and B. K. P. Horn, “Passive navigation,” Computer Vision Graphics, and Image Processing 21.1 (1983): 3-2
Copyright
Copyright © 2023 Kotresh H M, Swathi S, Sahana M S, Veena Vinodini M N, Sahana G K. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET50475
Publish Date : 2023-04-15
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online