

Ijraset Journal For Research in Applied Science and Engineering Technology
DTMF Controlled Robot Using Arduino
Authors: Katkuri Sanhith, Bejjanki Sai Raj, Arpula Surya Teja, S. Ramani
DOI Link: https://doi.org/10.22214/ijraset.2022.40746
Certificate: View Certificate
Abstract
In this paper, we will control the Robotic car using the Dual Tone Multi Frequency (DTMF) technology. DTMF technology is useful technique in the present days. It works on the methods digital signal processing. Wireless control robots will use RF circuit that has many drawbacks like limited working range and limited control. This DTMF will have advantage over the RF; it will increases the range of working and also gives the good results in case of motion and direction of robot using the mobile phone through a micro controller. This type of wireless communication gives an remote handling operation of Robot using the DTMF. An robot is a electro-mechanical machine which has been guided by the computer, Mobile phone or programming, and is able to do the tasks by its own. The Robot Institute of America had defined A robot is an reprogrammable multifunctional manipulator -designed to move material parts, tools , specialized device through a variable programmed motions for an performance of many variety of tasks. Conventionally, wireless controlled robots will uses the RF circuits, which has the drawbacks of limited working of range & frequency range, use of mobile phones can be overcomed by this limitation.
Introduction
I. INTRODUCTION
An robot is a electro-mechanical machine which has been guided by the computer, Mobile phone or programming, and is able to do the tasks by its own. The Robot Institute of America had defined A robot is an reprogrammable multifunctional manipulator -designed to move material parts, tools , specialized device through a variable programmed motions for an performance of many variety of tasks. Conventionally, wireless controlled robots will uses the RF circuits, which has the drawbacks of limited working of range & frequency range, use of mobile phones can be overcomed by this limitation. In present days almost all the people were familiar with an robot. Robots will play an very important role in the human life. Robots are the machine which reduces human efforts on heavy works in the industries, building etc. and makes easy life. We are here with our new robot that was DTMF Controlled Robot. DTMF controlled Robot runs over the mobile DTMF technology that will exists on Dial tone. DTMF defined as Dual Tone Multiple Frequency. There are some frequencies that will used to create an tone. In simple words by adding ,mixing of two or more frequencies generates an DTMF tone. DTMF is an Dual Tone Multiple Frequency decoder module which will have a MT8870 DTMF decoder IC which will decode an DTMF tone signal to an digital signal that are well acceptable for an arduino digitally. Here a aux wire is needed for connecting DTMF module to mobile phone.
II. FLOWCHART
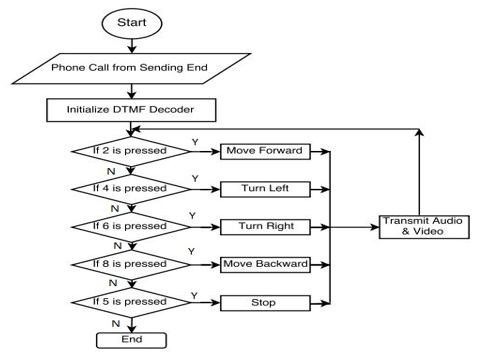
DTMF controlled robot run by some commands that are send via mobile phone. We are here using the DTMF function of an mobile phone. Here we have used an mobile phone to show the working of project. One is the user mobile phone that we will make call ‘remote phone’ and second one that are connected with the Robot’s circuit using aux wire. This mobile phone we will call the Receiver Phone. First we will make a call by using an remote phone to the receiver phone and then attend the call by manually ,automatic answer mode. Now here is how this DTMF controlled robot is controlled by an cell phone:
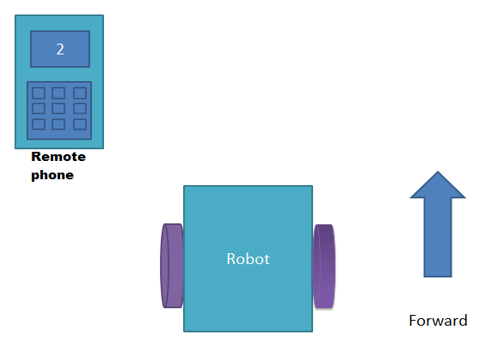
- When we press ‘2’ by remote phone, then robot start to moving forward and moving continues forward until next command comes.
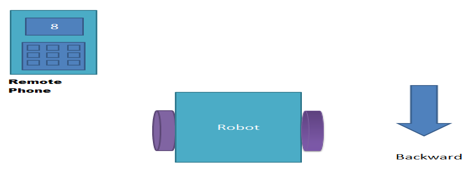
- When we press ‘8’ by an remote phone, then robot change his state and start moving in the backward direction until other command comes.
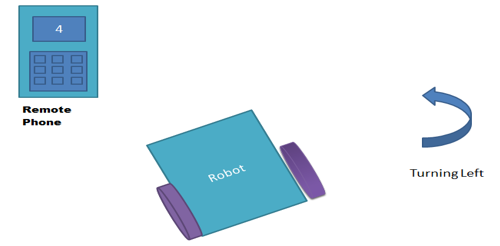
- When we press ‘4’, then Robot get turn left till the next command executed.
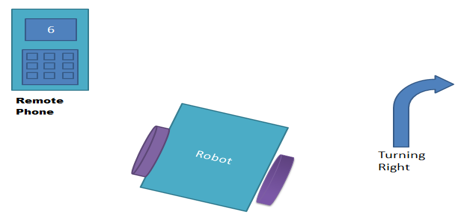
- When we press ‘6’, then robot turned to right .
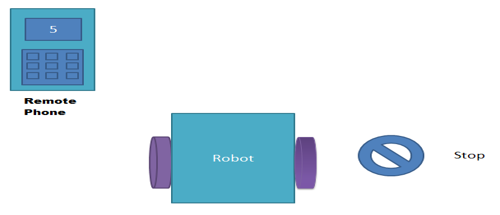
- And for stopping robot we press‘5’.
III. LITERATURE SURVEY
The aim of this project is to improve the machine operation in Malaysia Industry and also in medical facilities. In this project the technology that we had used is the Dual-Tone Multi-Frequency Technology. The DTMF signalling are used for the telecommunication signaling over the analog telephone lines in voice frequency band between the telephone handsets and the other communication device and switching centre.
The underlying principle mainly relies on the ability of DTMF (Dual-ToneMulti-Frequency)Technology to acts as a remote for controlling the land-rover to move. It will generate DTMF corresponding to a number or code in the number pad and then detect the same number or code from its corresponding DTMF . In detail the DTMF generator will generates the two frequencies corresponding to the number or an code in the number pad which will be transmitted through an communication networks, constituting the transmitter section which was very simply equivalent to a mobile set.
For my project the microcontroller is an preprogrammed to take an decision for any given input and the outputs its decision to motor drivers in order to drive motors forward, backward motion and a to turn a vehicle. Microcontroller will acts as an brain of my project because the code will give an action to the motor to move it. It can be use two method with , without using an microcontroller software. The second method which is without using an Microcontroller Interfacing software, the microcontroller is replace with the equivalent logic circuit that will act as a decoder to convert the binary to perform the action of landrover.
When using this second method, it will be an problem in excessive current division due to overloaded logic. So the chosen of using the microcontroller is an best solution to avoid this entire problem from happening in constructing this project. These both methods operate in the sameway which is drawback the limited working range, limited range and the limited control.
In this paper the authors used an IC89C51, DTMF, radio control, remote control vehicle and design the new method of construction of the cell phone controlled robotic car. The radio frequency circuit is used for an limited distance so to overcome this problem the authors uses the Dual Tone Multi Frequency which will used for long distance. The main intention of project is to control a robotic car using Dual Tone Multi Frequency. In this paper author uses robot, GSM, Arduino, Dual Tone Multi Frequency decoder. In this paper they represented a vehicle development which is controlled by an GSM and an Arduino is used for design of the vehicle. This system wii use Dual Tone Multi Frequency and it can be controlled over very long distance. The C and C++ languages are used as programming language in this system. The remote-control technologies had been used in the fields like factory automation, space discovery, in places where human entry was difficult. As this has been accomplished in domestic systems partially many corporations and the laboratories are looking for the methods which enable human to operation and to monitor efficiently and easily in the house . Operation of the domestic system without any restriction of time and space is an important challenge.
IV. WORKFLOW PROCESS
DTMF technology works on having the handset generate tones at a specific frequencies and playing them over an phone line when a button is pressed on keypad. Equipment at an other end of phone line listens to have specific sounds and decodes them into commands. These commands are typically used to the dial a phone number to call but also be used to signal phone control commands or control remote equipment, since the control tones are played in the same channel as voice signal. It is a in band signaling system this is different than outof band systems.
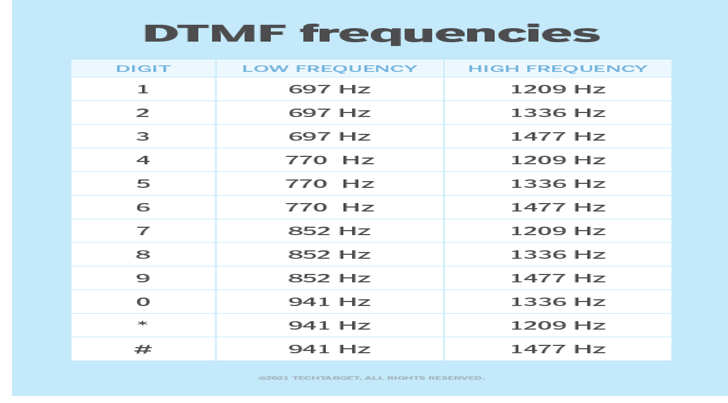
DTMF specifies an eight different tones. They are divided into an high group and an low group. Each key press the corresponds to two tones hence name dual tone one from an high group and one from the low group. This allows for sixteen total keys.These keys are specified as the numbers 0 through 9, * , # and the letters A through and D. The letter keys are not generally used and they are omitted from the vast majority of consumer telephones. The telecommunications industry have chose two simultaneous tones for each key to eliminate possibility of the human voice triggering in the system.
DTMF developed by the Bell System, was introduced for an public use on Nov. 18, 1963. It was known by the trademark Touch Tone and was quickly accepted as an standard and adopted globally. DTMF was been initially developed by using analog electronics. The original systems be would use tuned coils with taps at appropriate locations to generate the correct tone. Modern telephones use single chip integrated circuits to generate tones.
V. IMPLEMENTATION
A. When we press ‘2’ by remote phone, then robot start to moving forward and moving continues forward until next command comes.
2. When we press ‘8’ by an remote phone, then robot change his state and start moving in the backward direction until other command comes.
3. When we press ‘4’, then Robot get turn left till the next command executed.
4. When we press ‘6’, then robot turned to right .
5. And for stopping robot we press‘5’.
VI. FUTURE SCOPE
The future scope Alarm Phone Dialer by replacing the DTMF Decoder IC CM8870 by an DTMF Transceiver IC CM8880, DTMF tones can be generated from the robot. So, a project called 'Alarm Phone Dialer' can bebuilt which will generate necessary alarms for something that is desired to be monitored . For an example, the high water alarm, the low temperature alarm, an opening of back window, garage door, etc. When the system is activated it will call a number of programmed numbers to let the user know the alarm has been activated. It would be great to get the alerts of alarm conditions from the home whenuser is at work. Adding A Camera If the current project is interfaced with a camera (e.g. a Webcam) robot can be driven beyond line-of-sight &range becomes practically unlimited as GSM networks have avery large range
Conclusion
In the designing of our project, we have kept in mind the user. The controlling of the robot can overcome the drawback of RF communication which has an limited range where this car can be controlled from anywhere just using the DTMF technology. It will provide robust control over a wide area of the service provider. The program used in project give very good control over the movement of robot. The future scope or implications of the project are very great. This project based on wireless communication and can be achieved using Wi-Fi network or internet By developing this robotic vehicle, we have overcome this drawbacks of the RF communication which have an limited range whereas this car can be controll from anywhere just using this DTMF technology.
References
[1] Yun Chan Cho and Jae Wook Jeon “Remote Robot control System based on DTMF of Mobile Phone”, IEEE International Conference INDIN 2008, July 2008. [2] Awab Fakih, Jovita Serrao, “Cell Phone Operated Robotic Car.”International Journal of Scientific andEngineering Research, ISSN 2229-5518. 3. Kim, D. H., Park, Y. S., Kwon, S. G., and Yang, Y. Y. (2011). Design and implementation of surveillance and combat robot [3] Shreyansh Sharma, Harshit Panndey “Object Recognition using Tensorflow and Convolutional Neural Network”,International Research Journal of Engineering and Technology (IRJET), e-ISSN: 2395-0056 p-ISSN: 2395-0072,Volume: 07 Issue: 07 , July 2020. [4] Salman Shaikh, Saiyed Farhan Jafar, Karan Sosa and Pratap Nair,”Smart Helmet for Visually Impaired”, published in IRJET journal e-ISSN: 2395-0056 p-ISSN: 2395-0072 Volume: 06, Issue: 04, April 2019. [5] Tiagrajah V. Janahiram and Mohamed Shahrul Mohamed Subuhan, “Traffic Light Detection Using Tensorflow Object Detection Framework”, published in ICSET journal,October 2019. [6] A. Mulyanto, R. I. Borman, P. Prasetyawan, W. Jatmiko and P. Mursanto, \"Real-Time Human Detection and Tracking Using Two Sequential Frames for Advanced Driver Assistance System,\" 3rd International Conference on Informatics and Computational Sciences (ICICoS), 2019, pp. 1-5, doi: 10.1109/ICICoS48119.2019.8982396,2019. [7] N. A. othman, M. U. salur, M. karakose and I. aydin, \"An Embedded Real- Time Object Detection and Measurement of its Size,” International Conference on Artificial Intelligence and Data Processing (IDAP), 2018, pp. 1-4, Doi: 10.1109/IDAP.2018.8620812, 2018. [8] A. Roselin, R. Suganya, N. Surya, A. Suvetha and K. Manju Priya, “Multifunctional Device for blind people”, published in GRD journal, e-ISSN: 2455-5703,2018.
Copyright
Copyright © 2022 Katkuri Sanhith, Bejjanki Sai Raj, Arpula Surya Teja, S. Ramani. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET40746
Publish Date : 2022-03-11
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online