

Ijraset Journal For Research in Applied Science and Engineering Technology
e-Sammarjana: An Intelligent Robo-Cleaner Using IOT and AI Technology
Authors: Shivani S Aurad, Shreyas Purohit, Tanush Indoria, Dr. Shridevi Soma
DOI Link: https://doi.org/10.22214/ijraset.2023.52470
Certificate: View Certificate
Abstract
Today’s households are getting smarter and more digital. Home automation adds flexibility and allows more time for people. Domestic robots are entering the homes and people’s daily lives, but it is yet a relatively new and immature market. However, a growth is predicted, and the adoption of domestic robots is evolving. Our work is an Automatic Robo-Cleaner that will be helpful to make household work convenient and much easier. This operates in autonomous along with additional features such as dirt container with auto-dirt disposal mechanism. They are seen as more convenient to use because they can clean on their own. To develop a system of such type requires the basic knowledge of mechanical design, power requirements and adding intelligence to the machine and connecting it to the internet. The research done is a Robo-cleaner that works in four-fold namely the mechanical part (curved rectangular shape, driving wheels, DC motor), electrical (rechargeable DC battery, Driver IC), Internet of things part (controlling whole device using android app) and intelligence part (Voice-controlled and sensors are trained to avoid obstacles). Here, artificial intelligence is adopted to enable intelligent scheduling and motion control for optimized operation of the Robo-Cleaner. The main novelty of this paper is its ability to identify any flames present near the robot and to clean staircases and also detect humans and other entities with the purpose of avoiding causing any harm to them. Through the android app, which will have certain modes, the user will be able to take control of the robot manually whenever he wants, and he will be able to make the robot move autonomously again whenever he wants.
Introduction
I. INTRODUCTION
In today’s life, time management is considered as one of the most important factors. A very notable household chore is floor sweeping that is often seen as a challenging and tedious task. In most cases, cleaners are employed to do the job, rather than the occupants of the home. The difficulty caused by this repetitive chore warranted the creation of a vacuum cleaner capable of assisting humans with such a task. A vacuum cleaner is an electromechanical device which is usually used by suction to clean walls, chairs, rugs and carpets. The electric motor inside the unit turns a fan that produces a partial vacuum and allows air to rush into the vacated space outside. That pushes any dirt or dust around the nozzle into or stuck to the outside of a bag inside the unit. The demand to reduce manpower level has led to the design and development of automatic control systems, which enables unattended operations of the machinery. The current automatic integrated systems cover all aspects of Automatic vacuum cleaner operations. Although efficient, current vacuum cleaners are rather voluminous and therefore require large manpower for proper functioning. The former vacuum cleaners using suction generation and collected dust with a spinning brush, the latter worked with a belt driven by hand-cranked fan making it difficult to use. More powerful sweepers fitted with limited suction power were developed in the late 1990s and early 2000s. The robotics vacuum cleaners are ideal for offices, hotels, hospitals and residences, depending on the design goal. However, for efficient operation, most cheap cleaners need a better cleaning pattern algorithm while the smart ones are rather complex, and thus beyond the scope of most homes. In this project we identified and designed an autonomous robot that will assist people at home who are too busy for daily or weekly floor cleaning, especially for families with children. For the elderly who live by themselves and do not have the strength or ability to clean. Robotic vacuum cleaners in the market are expensive and inefficient in terms of cleaning time and cleanliness. The goal is to design an omni-directional platform with infrared sensors, wireless sensors, bumpers, ultrasound, reshape, and four bristle brushes on every side to improve the cited cleaning performance problems. We tried to keep the making cost very affordable among the already available Robo-cleaners by using more efficient processors and sensors which require less power and have more efficiency in giving accurate decisions for operation
II. PROPOSED ARCHITECTURE
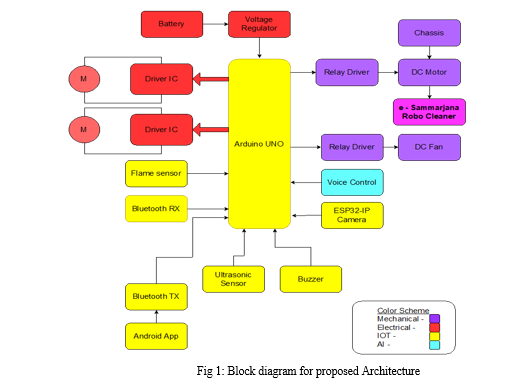
The proposed architecture of autonomous Robo-cleaner is comprised of: DC Power Unit, Arduino Uno, Ultrasonic Sensors, Motor Driver, Bluetooth RX, Android App, Web Camera, Vacuum Kit.
The main objective of the proposed work is to improve the efficiency of cleaning mechanism while being cost effective. Effective mobility of vacuum is provided by rounded edges and effective cleaning is provided by means of rectangular shape. The block diagram of proposed robotic architecture is shown below:
III. IMPLEMENTATION
The implementation of an automatic vacuum cleaner involves designing and developing a robotic device capable of cleaning floors and carpets autonomously. The research work aims to provide a solution to the problem of manual cleaning, which can be time-consuming and tedious. The automatic vacuum cleaner utilizes various technologies, including sensors, motors, and artificial intelligence, to navigate around a room, avoid obstacles, and clean the floor effectively. The e-Sammarjana work implementation involves four main components, which are Mechanical, Electrical, IoT, and AI.
A. Mechanical Component
The mechanical component of the e-Sammarjana involves designing and prototyping the physical components of the robot, such as the chassis, wheels, and cleaning mechanism. This component is critical to the success of the work as it determines the robot's overall performance, including its ability to navigate the environment and clean effectively. Here is a breakdown of the mechanical component of the methodology planned for the e-Sammarjana project:
- Designing the chassis: The chassis is the foundation of the robot, and its design enable effective cleaning and movement. It is sturdy enough to withstand the robot's movements, yet lightweight enough to allow for efficient movement. The chassis is designed in a curved rectangular shape to accommodate the various components, such as the motors, sensors, and cleaning mechanism.
- Designing the wheels: The wheels are an essential component of the robot, as they enable movement and determine the robot's ability to navigate around the environment. We have used 4 wheels for the easy moment of the robot. The wheels are designed to provide sufficient traction on different floor surfaces, such as carpet and hardwood. They are also durable enough to withstand constant movement and wear.
- Designing the cleaning mechanism: The cleaning mechanism is the part of the robot that comes into contact with the floor surface and performs the cleaning function. The design of the cleaning mechanism is effective in removing dirt and debris from different types of floor surfaces. It is also designed to enable easy maintenance and cleaning.
- Selecting the appropriate materials: The selection of materials for the robot's mechanical components is critical to the robot's overall performance and durability. The materials are durable, lightweight, and corrosion-resistant, as the robot will be exposed to different types of environments.
B. Electrical Component
The electrical component of the e-Sammarjana involves designing and building the electronic components of the robot, including the motor control and power supply. This acts as the heart of the whole design. This component is essential to the robot's overall functionality, as it provides power to the mechanical components and enables the robot to move and clean autonomously.
- Designing the power supply: The power supply is responsible for providing the robot with the necessary power to operate the motor and other electronic components. The power supply is designed to meet the specific voltage and current requirements of the robot's components. In our work, we have used rechargeable batteries which provide with 12V to the whole circuit. The design also ensures that the power supply is compact, lightweight, and durable.
- Designing the motor control: The motor control is responsible for controlling the speed and direction of the robot's motors. The motor control must be designed to ensure that the robot moves smoothly and precisely, and that it can navigate around obstacles and changes in floor surface. The design should also incorporate safety features, such as emergency stop switches, to ensure that the robot can be stopped quickly if necessary.
- Integrating sensors: Sensors are essential to the robot's ability to navigate and clean autonomously. The electrical component of the methodology planned involves integrating sensors, and mounting them on to a PCB. We have designed the PCB in such a way that it controls the working of the 4 motors while connected to the battery. The design ensures that the sensors are reliable, accurate, and able to communicate with the other electronic components. The design of our PCB is custom designed using diptrace PCB design.
C. IoT Component
The Internet of Things (IoT) component of the e-Sammarjana involves designing and implementing the connectivity and communication capabilities of the robot. IoT technology enables the robot to connect and communicate with other devices, such as smartphones or computers. This component of the methodology planned is crucial for the robot to perform its tasks efficiently and remotely. The e-SAMMARJANA is a robot cleaner designed to navigate autonomously and clean indoor spaces. The robot is equipped with various sensors and modules to enable obstacle detection, environment mapping, and efficient cleaning. The Arduino UNO acts as the main controller board, receiving input from sensors and using it to control the robot's motors and wheels. It also manages communication with other components such as the Bluetooth HC-05 module and the ESP32 CAM. The Bluetooth module enables wireless control of the robot from a mobile device, while the ESP32-CAM module captures images of the robot's surroundings, allowing for computer vision algorithms to enable autonomous navigation. The robot is equipped with a flame sensor that detects potential fire hazards, ensuring safe navigation. The ultrasonic sensor detects the distance between the robot and nearby obstacles, enabling the robot to avoid collisions and navigate smoothly. The robot's movement is controlled through various functions programmed into the Arduino UNO, such as Robot_Forward(), Robot_Reverse(), Robot_Right(), and Robot_Left(). Additionally, the Robot_Stop() function is used to halt the robot's movement. The robot is also equipped with a vacuum function that can be activated through the Robot_Vacuum() function. Finally, the Robot_Auto() function enables autonomous navigation, allowing the robot to move and clean while avoiding obstacles. The function continuously monitors the ultrasonic sensor and halts the robot's movement if a nearby obstacle is detected. Additionally, the function listens for commands through the Bluetooth HC-05 module and executes them accordingly. The e-SAMMARJANA work demonstrates the potential for robotics and IoT technologies to enable efficient and autonomous cleaning of indoor spaces. The integration of various sensors and modules into the robot enables safe navigation, efficient cleaning, and user-friendly control. The research done here has the potential to benefit individuals and businesses alike by providing a cost-effective and efficient cleaning solution.
D. AI Component
One of the key AI methodology planned for the e-SAMMARJANA is the integration of voice control, which enables users to control the robot cleaner using voice commands.
This involves the use of speech recognition algorithms, which are trained to recognize and interpret specific voice commands such as "start" or "stop". The voice control feature enhances the user experience by eliminating the need for physical work, and allowing users to interact with the robot cleaner more naturally and intuitively. It also provides added convenience for users with disabilities or limited mobility, who may find it challenging to use physical controls. The voice control feature also requires the integration of text-to-speech algorithms, which enable the robot cleaner to provide voice feedback to the user, such as confirming receipt of the command or providing updates on the cleaning progress. Overall, the integration of voice control as an AI methodology planned for the e- SAMMARJANA provides a unique and user-friendly interface for controlling the robot cleaner, while enhancing the overall user experience.
IV. RELATED WORK
The objective paper that is presented in [1] present a framework on design and optimization of an autonomous vacuum floor cleaner robot. In this paper, they have introduced an initiative to build a cost effective floor cleaner robot. Using a vacuum cleaning system, they designed and implemented a cleaning robot. The paper has described how an operational floor cleaning robot prototype has been developed along with the techniques of the indoor mapping and positioning system. Raspberry Pi and Arduino Mega are used in unison as the processor of the robot. This robot can map and clean a certain area of a building floor autonomously. One novel contribution of this work is the introduction of a GPS module to the Raspberry Pi so that the robot can be aware of its location and move in the right direction. Human assistance is only required for waste disposal and maintenance. The proposed system detects the nature of the waste materials as dry waste. It also identifies the level of garbage in the bin. It detects whether bin is filled or empty to customize the waste collection schedule.
Authors in [2] present the importance of a controller such as an android based device. This paper presents the design and implementation of a smart autonomous floor cleaner with an Android-based controller. The implementation is based on an Arduino MEGA microcontroller, a floor cleaner system and a mobile application with wireless connectivity. The Android application features a secure user login system and connects to the robot cleaner through Bluetooth. It can be used to control the robot motion to guide it in a specific direction to vacuum or mop the floor. The user has complete control over the robot either in the autonomous or remote-controlled mode. The implemented cleaning system consists of five main blocks namely the power block (rechargeable dc battery), the motor system (driving wheels, rotating brush, vacuum fan, water pump), communication block (Bluetooth control, HC 06 Bluetooth module) and software block (Android remote controlled). Upon the implementation and testing of this prototype, they observed that the robot works as programmed, and is equipped with most of the functionalities of a household commercial stateof- art cleaning robot.
Using today's advanced technologies, a smart robot vacuum cleaner design and simulation is presented that will make people's lives easier and help them with cleaning. Accordingly, in the smart vacuum cleaner design the author addressed, the robot will have the ability to move autonomously, independent of human beings. While it moves autonomously, it will detect the objects around it with the sensors and avoid possible collisions. And in the simulation program used, it will create a map of the environment it is in and mark the locations of the objects here. In this work, there will also be a mobile application where the user can manually control the smart robot, turn it on and off, determine its location and change some of its features. By communicating with the robot via Bluetooth from the application on his mobile phone, the user will be able to manually control it with all his movements, return it to autonomous operation, make it sound from the application to find out where it is, and activate the led lights on the robot by turning on the night use mode. This idea was presented in [3].
Conclusion
In conclusion, the development of an automatic vacuum cleaner with advanced features such as obstacle detection and temperature sensing represents a significant advancement in domestic robotics. As the market for these types of robots continues to grow, there is an increasing demand for more efficient and intelligent cleaning solutions. The use of modern technologies such as Arduino, Raspberry Pi camera, and Artificial Intelligence has enabled the creation of a cleaner that is not only more effective at its task, but also more adaptable to its environment. One of the main benefits of this technology is its potential to improve the quality of life for individuals with physical disabilities or the elderly. The robot\'s ability to autonomously clean floors reduces the risk of falling accidents, while also reducing the physical effort required to maintain a clean living space. Additionally, the AI incorporated into the vacuum cleaner allows it to learn and adapt to its environment, improving its performance over time. However, as with any new technology, there are challenges to be addressed in terms of cost, size, and efficiency. The development of an optimal vacuum cleaner requires a careful balance between these factors, as well as the ability to continuously improve the machine\'s capabilities through software and hardware upgrades. Overall, the development of this advanced automatic vacuum cleaner represents a significant step forward in the field of domestic robotics, with the potential to improve the lives of individuals and families alike. As this technology continues to evolve, it is likely that we will see even more advanced and intelligent cleaning solutions that further improve our quality of life. The proposed paper of designing an autonomous Robo-cleaner with advanced features has a vast potential for future development and improvements. One of the future scopes for this project is to enhance the robot\'s AI and machine learning capabilities. With the integration of more advanced algorithms, the robot can analyse its environment and adjust its cleaning methods accordingly. It can learn to distinguish between different types of surfaces and determine the most effective cleaning techniques for each surface. Additionally, it can learn to optimize its cleaning schedule to minimize energy consumption and maximize efficiency. Another future scope is to incorporate more sensors and technologies to improve the robot\'s obstacle avoidance and detection capabilities. This can include integrating sensors such as LIDAR or ultrasonic sensors to improve the robot\'s ability to navigate around obstacles and better detect objects in its path. This can help prevent damage to the robot and ensure the safety of humans and pets around the robot. Moreover, the robot can be equipped with advanced mapping and localization technologies. This can enable the robot to create a detailed map of the cleaning area and localize its position with greater accuracy. It can help the robot to efficiently navigate through complex environments and clean the entire area effectively without leaving any spots. Lastly, future research can focus on developing sustainable and eco-friendly materials for the Robo-cleaner to reduce its carbon footprint. The use of biodegradable materials and rechargeable batteries can make the robot more environmentally friendly and reduce waste. Overall, the future scope of this work is vast and exciting. With more advancements in technology, the possibilities for further development and improvements of the Robo-cleaner are endless.
References
[1] Designing And Optimization of Autonomous Vacuum Floor Cleaning Robot,Authors: H.A. Shakhawat Hossen Prayash;Md. Ragib Shaharear;Md.Farhanul Islam. [2] A Smart Autonomous Floor Cleaner With An Android Based Controller,Authors: Anshu Prakash Murdan;Pawan Kumar Ramkissoon. [3] Smart Cleaner Design,Authors: Muhammed Dogan;Berker Uysal;Pinar Kirei [4] Bhatt, Mahesh Chandra, Dharmendra Sharma, and Ashish Chauhan.“Smart Dustbin for Efficient Waste Management.” International Research Journal Of Engineering And Technology 6, no. 07 (2019): 967-969J. [5] Sakshi Popli, Rakesh Kumar Jha, Sanjeev Jain.\"A Survey on Energy Efficient Narrowband Internet of things (NBIoT): Architecture, Application and Challenges\", IEEE Access,2018S. [6] T.B. Asafa, T.M. Afonja, E.A. Olaniyan, H.O. Alade. \"Development of a vacuum cleaner robot\", Alexandria Engineering Journal, 2018. [7] Hussain, Mohammad Abbas, Kvs Nikhil, and Koppuravuri Yaswanth Pavan Kalyan. “IOT Based Smart Dustbin Monitoring With Tracking System Using ATMega 2560 Microcontroller.” In 2019 Fifteenth International Conference on Information Processing (ICINPRO), pp. 1-6.IEEE, 2019. [8] Murugaanandam, S., V. Ganapathy, and R. Balaji.“Efficient iot based smart bin for clean environment.” In 2018 International Conference on Communication and Signal Processing (ICCSP), pp. 0715-0720. IEEE, 2018. [9] Saha, Himadri Nath, Sourav Gon, Annesha Nayak, and Sumandrita Moitra. “Iot Based Garbage Monitoring and Clearance Alert System.” In 2018 IEEE 9th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), pp. 204-208. [10] Kaur, Manreet, and Preeti Abrol, \"Design and development of floor cleaner robot (automatic and manual)\", International Journal of Computer Applications 97, no. 19 (2014). [11] Pinheiro, Paulo, Eleri Cardozo, Jacques Wainer, and Eric Rohmer, \"Cleaning task planning for an autonomous robot in indoor places with multiples rooms\", International Journal of Machine Learning and Computing 5, no. 2 (2015). [12] Shridevi Soma, Sushmita Dyapur, \"A Survey on IOMT based Food Recommendation System”, International Journal of Computer Applications (0975 – 8887) Volume 184– No.25, August 2022.
Copyright
Copyright © 2023 Shivani S Aurad, Shreyas Purohit, Tanush Indoria, Dr. Shridevi Soma. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET52470
Publish Date : 2023-05-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online